Anda mungkin juga menyukai
- 6th Central Pay Commission Salary CalculatorDokumen15 halaman6th Central Pay Commission Salary Calculatorrakhonde100% (436)
- Instrumentation Drawing 1Dokumen33 halamanInstrumentation Drawing 1Ercherio MarpaungBelum ada peringkat
- Granular Sound Spatialization UsingDokumen5 halamanGranular Sound Spatialization UsingJosue CorreaBelum ada peringkat
- NC Math 2 Cumulative Review 2Dokumen2 halamanNC Math 2 Cumulative Review 2api-278028472Belum ada peringkat
- Davis - Mathematics of Matrices PDFDokumen366 halamanDavis - Mathematics of Matrices PDFRafael Garcia100% (1)
- A Performance Study of MIMO Detectors: Christoph Windpassinger, Lutz Lampe, Robert F. H. Fischer, Thorsten HehnDokumen16 halamanA Performance Study of MIMO Detectors: Christoph Windpassinger, Lutz Lampe, Robert F. H. Fischer, Thorsten HehnLe-Nam TranBelum ada peringkat
- Quadratic InequalitiesDokumen3 halamanQuadratic InequalitiesTheKnow04100% (4)
- Final ReportDokumen5 halamanFinal ReportAndre MenckBelum ada peringkat
- Subspace-Based Localization of Near-Field Signals in Unknown Nonuniform NoiseDokumen5 halamanSubspace-Based Localization of Near-Field Signals in Unknown Nonuniform NoiseWeiliang ZuoBelum ada peringkat
- Calculating Dispersion Derivatives in Fiber Optic Design: Linda KaufmanDokumen8 halamanCalculating Dispersion Derivatives in Fiber Optic Design: Linda KaufmanXuan Nguyen QuangBelum ada peringkat
- An1 Derivat - Ro BE 2 71 Mathematical AspectsDokumen8 halamanAn1 Derivat - Ro BE 2 71 Mathematical Aspectsvlad_ch93Belum ada peringkat
- ML Estimation of Covariance Matrix For Tensor Valued Signals in NoiseDokumen4 halamanML Estimation of Covariance Matrix For Tensor Valued Signals in NoiseIsaiah SunBelum ada peringkat
- Bad GeometryDokumen5 halamanBad GeometryMilica PopovicBelum ada peringkat
- Rastegin2010 Article PartitionedTraceDistancesDokumen13 halamanRastegin2010 Article PartitionedTraceDistancesFernán González IbañezBelum ada peringkat
- Schoner TDokumen12 halamanSchoner TEpic WinBelum ada peringkat
- Reconstruction of A Low-Rank Matrix in The Presence of Gaussian NoiseDokumen34 halamanReconstruction of A Low-Rank Matrix in The Presence of Gaussian NoiseVanidevi ManiBelum ada peringkat
- Cram Er-Rao Bound Analysis On Multiple Scattering in Multistatic Point Scatterer EstimationDokumen4 halamanCram Er-Rao Bound Analysis On Multiple Scattering in Multistatic Point Scatterer EstimationkmchistiBelum ada peringkat
- Chord 2 VecDokumen5 halamanChord 2 VecjlgultraboomBelum ada peringkat
- Blind Signal Separation and Identification of Mixtures of ImagesDokumen6 halamanBlind Signal Separation and Identification of Mixtures of ImagesShadowBelum ada peringkat
- The Use of Huygens' Equivalence Principle For Solving 3-D Volume Integral Equation ScatteringDokumen8 halamanThe Use of Huygens' Equivalence Principle For Solving 3-D Volume Integral Equation Scatteringanjan_debnathBelum ada peringkat
- Research Article: A Novel ULA-Difference-Coarray-Based DOA Estimation Method For General Coherent SignalsDokumen13 halamanResearch Article: A Novel ULA-Difference-Coarray-Based DOA Estimation Method For General Coherent SignalsMark LindseyBelum ada peringkat
- Iterative Methods of Richardson-Lucy-type For Image DeblurringDokumen15 halamanIterative Methods of Richardson-Lucy-type For Image DeblurringhilmanmuntahaBelum ada peringkat
- Proper Orthogonal DecompositionDokumen10 halamanProper Orthogonal DecompositionKenry Xu ChiBelum ada peringkat
- Linear Prediction-Based DOA Estimator in Non-Uniform Noise: Circuits Systems and Signal Processing May 2021Dokumen14 halamanLinear Prediction-Based DOA Estimator in Non-Uniform Noise: Circuits Systems and Signal Processing May 2021RahulMondolBelum ada peringkat
- Paper Title: Author Name AffiliationDokumen6 halamanPaper Title: Author Name AffiliationPritam PatilBelum ada peringkat
- A Spectral Approach To BandwidthDokumen19 halamanA Spectral Approach To Bandwidthforoud_makvandi1985Belum ada peringkat
- General Principles of Brane Kinematics and DynamicsDokumen12 halamanGeneral Principles of Brane Kinematics and DynamicsOliver BardinBelum ada peringkat
- Constraining Approaches in Seismic TomographyDokumen16 halamanConstraining Approaches in Seismic Tomographyecce12Belum ada peringkat
- Efficient Soft MIMO Detection Algorithms Based On Differential MetricsDokumen5 halamanEfficient Soft MIMO Detection Algorithms Based On Differential MetricsshyamBelum ada peringkat
- Lecture 13: Expander CodesDokumen4 halamanLecture 13: Expander Codesshtompel07Belum ada peringkat
- Extended Subspace Error Localization For Rate-Adaptive Distributed Source CodingDokumen5 halamanExtended Subspace Error Localization For Rate-Adaptive Distributed Source CodingCroco AliBelum ada peringkat
- Vector Line IntegralsDokumen17 halamanVector Line Integralspassword0909Belum ada peringkat
- Distance Regression by Gauss-Newton-type Methods and Iteratively Re-Weighted Least-SquaresDokumen15 halamanDistance Regression by Gauss-Newton-type Methods and Iteratively Re-Weighted Least-SquaresMárcioBarbozaBelum ada peringkat
- Some Remarks On Spherical HarmonicsDokumen15 halamanSome Remarks On Spherical HarmonicsAlba García RuizBelum ada peringkat
- Gaussian Random Field Models For Spatial DataDokumen47 halamanGaussian Random Field Models For Spatial DataPablo BenitezBelum ada peringkat
- Remezr2 ArxivDokumen30 halamanRemezr2 ArxivFlorinBelum ada peringkat
- Betweeness PurDokumen22 halamanBetweeness Purabdou skBelum ada peringkat
- Thesis Proposal: Graph Structured Statistical Inference: James SharpnackDokumen20 halamanThesis Proposal: Graph Structured Statistical Inference: James SharpnackaliBelum ada peringkat
- Recursive Mmse Estimation of Wireless Channels Based On Training Data and Structured Correlation LearningDokumen6 halamanRecursive Mmse Estimation of Wireless Channels Based On Training Data and Structured Correlation LearningVanidevi ManiBelum ada peringkat
- An Adaptive Metropolis Algorithm: 1350 7265 # 2001 ISI/BSDokumen20 halamanAn Adaptive Metropolis Algorithm: 1350 7265 # 2001 ISI/BSSandeep GogadiBelum ada peringkat
- 1-S2.0-S0898122109007263-MainDokumen14 halaman1-S2.0-S0898122109007263-MainThiago NobreBelum ada peringkat
- Distmesh TutorialDokumen17 halamanDistmesh TutorialBubblez PatBelum ada peringkat
- Quantum Algorithms For Curve Fitting: Guoming Wang Computer Science Division, University of California, Berkeley, U.S.ADokumen22 halamanQuantum Algorithms For Curve Fitting: Guoming Wang Computer Science Division, University of California, Berkeley, U.S.Aohenri100Belum ada peringkat
- Calculating A Path AlgorithmDokumen13 halamanCalculating A Path AlgorithmredgoriyaBelum ada peringkat
- Aula 7 - Teoria de Cordas MITDokumen7 halamanAula 7 - Teoria de Cordas MITErick MouraBelum ada peringkat
- Near-Far Resistance of MC-DS-CDMA Communication SystemsDokumen4 halamanNear-Far Resistance of MC-DS-CDMA Communication SystemsIDESBelum ada peringkat
- Minimum Spanning Tree in Fuzzy Weighted Rough Graph: S. P. Mohanty, S. Biswal, G. PradhanDokumen6 halamanMinimum Spanning Tree in Fuzzy Weighted Rough Graph: S. P. Mohanty, S. Biswal, G. PradhanIJERDBelum ada peringkat
- Resistor Network Aproach EITDokumen55 halamanResistor Network Aproach EITjorgeluis.unknownman667Belum ada peringkat
- Doa EstimationDokumen8 halamanDoa Estimationanon_49540064Belum ada peringkat
- Var09 KS95Dokumen14 halamanVar09 KS95picard82Belum ada peringkat
- Frenkel BasriDokumen17 halamanFrenkel BasrifgggggBelum ada peringkat
- Ranking of Closeness Centrality For Large-Scale Social NetworksDokumen10 halamanRanking of Closeness Centrality For Large-Scale Social NetworksArdiansyah SBelum ada peringkat
- PerssonAndStrang MeshGeneratorDokumen17 halamanPerssonAndStrang MeshGeneratorJeff HBelum ada peringkat
- Least Mean Square Algorithm: X A T U A T S T XDokumen12 halamanLeast Mean Square Algorithm: X A T U A T S T XBhaskar VashisthaBelum ada peringkat
- Fitted Finite Volume Method For A Generalized Black-Scholes Equation Transformed On Finite IntervalDokumen22 halamanFitted Finite Volume Method For A Generalized Black-Scholes Equation Transformed On Finite IntervalLiz AlexandritaBelum ada peringkat
- Tai Lieu HayDokumen5 halamanTai Lieu HaydcngatranBelum ada peringkat
- Multi-Dimensional Model Order SelectionDokumen13 halamanMulti-Dimensional Model Order SelectionRodrigo RozárioBelum ada peringkat
- EE731 Lecture Notes: Matrix Computations For Signal ProcessingDokumen21 halamanEE731 Lecture Notes: Matrix Computations For Signal ProcessingKuruvachan K GeorgeBelum ada peringkat
- On Variants of Shortest-Path Betweenness Centrality and Their Generic ComputationDokumen22 halamanOn Variants of Shortest-Path Betweenness Centrality and Their Generic ComputationpremBelum ada peringkat
- Some Solutions To The Clifford Space Gravitational Field EquationsDokumen9 halamanSome Solutions To The Clifford Space Gravitational Field EquationsKathryn WilsonBelum ada peringkat
- Interpolated Advanced AlgorithmsDokumen19 halamanInterpolated Advanced AlgorithmsgowthamBelum ada peringkat
- 1.1 Metrics and Metric SpacesDokumen4 halaman1.1 Metrics and Metric SpaceshagostadesseBelum ada peringkat
- Survey On Metric DimensionDokumen29 halamanSurvey On Metric Dimensiondragance107Belum ada peringkat
- Nilai Praktikum PSD MOD 13TE2Dokumen2 halamanNilai Praktikum PSD MOD 13TE2Ercherio MarpaungBelum ada peringkat
- 01631474Dokumen7 halaman01631474Ercherio MarpaungBelum ada peringkat
- Berdasarkan ruang lingkup permasalahan dan tujuan penelitian maka peneliti menggunakan desain penelitian pre-experimen yaitu one-group pretest posttest design dengan metode survey yaitu peneliti mengukur tingkat pengetahuan perawat yang bekerja di ruang IRD yang mengacu pada standar America Heart Association (AHA) 2005 sebelum diberi Pendidikan Nonformal BHD dan sesudah diberi PeDokumen1 halamanBerdasarkan ruang lingkup permasalahan dan tujuan penelitian maka peneliti menggunakan desain penelitian pre-experimen yaitu one-group pretest posttest design dengan metode survey yaitu peneliti mengukur tingkat pengetahuan perawat yang bekerja di ruang IRD yang mengacu pada standar America Heart Association (AHA) 2005 sebelum diberi Pendidikan Nonformal BHD dan sesudah diberi PeRyo MuliansyahBelum ada peringkat
- Sutheebanjard 2010Dokumen4 halamanSutheebanjard 2010Ercherio MarpaungBelum ada peringkat
- 15.04.613 Jurnal EprocDokumen7 halaman15.04.613 Jurnal EprocErcherio MarpaungBelum ada peringkat
- A Water Pumping Control System With A Programmable Logic Controller (PLC) PDFDokumen8 halamanA Water Pumping Control System With A Programmable Logic Controller (PLC) PDFsunnyday32Belum ada peringkat
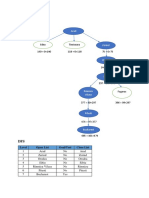
- Sibiu Timisoara: Level Open List Goal/Test Close ListDokumen2 halamanSibiu Timisoara: Level Open List Goal/Test Close ListErcherio MarpaungBelum ada peringkat
- Tutorial 7.1Dokumen6 halamanTutorial 7.1Ercherio MarpaungBelum ada peringkat
- InTech-High Precision Time of Arrival Estimation For Uwb Localizers in Indoor Multipath ChannelsDokumen28 halamanInTech-High Precision Time of Arrival Estimation For Uwb Localizers in Indoor Multipath ChannelsErcherio MarpaungBelum ada peringkat
- Cvavr ManualDokumen1 halamanCvavr ManualErcherio MarpaungBelum ada peringkat
- Paper30-Application Specific Study, Analysis and Classification of BodyDokumen18 halamanPaper30-Application Specific Study, Analysis and Classification of BodyErcherio MarpaungBelum ada peringkat
- Measurement of Energy Consumption of WSN For Indoor Environment (#320173) - 333728Dokumen7 halamanMeasurement of Energy Consumption of WSN For Indoor Environment (#320173) - 333728Ercherio MarpaungBelum ada peringkat
- Sibiu Timisoara: Level Open List Goal/Test Close ListDokumen2 halamanSibiu Timisoara: Level Open List Goal/Test Close ListErcherio MarpaungBelum ada peringkat
- 2017 Iscc ClusteringDokumen6 halaman2017 Iscc ClusteringErcherio MarpaungBelum ada peringkat
- Epson 3277Dokumen2 halamanEpson 3277Ercherio MarpaungBelum ada peringkat
- Sibiu Timisoara: Level Open List Goal/Test Close ListDokumen2 halamanSibiu Timisoara: Level Open List Goal/Test Close ListErcherio MarpaungBelum ada peringkat
- Face Detection and Recognition Using Viola-Jones Algorithm and Fusion of LDA and ANNDokumen6 halamanFace Detection and Recognition Using Viola-Jones Algorithm and Fusion of LDA and ANNErcherio MarpaungBelum ada peringkat
- MNL Nios2 Board Cycloneii 2c35Dokumen64 halamanMNL Nios2 Board Cycloneii 2c35Ercherio MarpaungBelum ada peringkat
- Akagi 2006Dokumen4 halamanAkagi 2006Ercherio MarpaungBelum ada peringkat
- 2017 Iscc ClusteringDokumen6 halaman2017 Iscc ClusteringErcherio MarpaungBelum ada peringkat
- 2017 Iscc ClusteringDokumen6 halaman2017 Iscc ClusteringErcherio MarpaungBelum ada peringkat
- Article PDFDokumen21 halamanArticle PDFErcherio MarpaungBelum ada peringkat
- Physical-Based Modeling of Nonlinearities in Process Control ValvesDokumen4 halamanPhysical-Based Modeling of Nonlinearities in Process Control ValvesErcherio MarpaungBelum ada peringkat
- Instrumentation Drawing 1Dokumen33 halamanInstrumentation Drawing 1Ercherio MarpaungBelum ada peringkat
- Trade-Off Between Energy Efficiency and Spectral Efficiency in The Uplink of A Linear Cellular System With Uniformly Distributed User TerminalsDokumen5 halamanTrade-Off Between Energy Efficiency and Spectral Efficiency in The Uplink of A Linear Cellular System With Uniformly Distributed User TerminalsErcherio MarpaungBelum ada peringkat
- A Practical Ethics ToolkitDokumen9 halamanA Practical Ethics ToolkitErcherio MarpaungBelum ada peringkat
- Mega8535 PDFDokumen1 halamanMega8535 PDFErcherio MarpaungBelum ada peringkat
- Mathematics in India Past Present and FutureDokumen5 halamanMathematics in India Past Present and FutureLakshmi SureshBelum ada peringkat
- Chapter 2 MATHEMATICAL LANGUAGE AND SYMBOLSDokumen7 halamanChapter 2 MATHEMATICAL LANGUAGE AND SYMBOLSAsthreya OfficialBelum ada peringkat
- M8L2 LNDokumen8 halamanM8L2 LNswapna44Belum ada peringkat
- Definition : Split-Octonion - WikipediaDokumen4 halamanDefinition : Split-Octonion - WikipediaLarios WilsonBelum ada peringkat
- 101 Analysis Bedtime StoriesDokumen9 halaman101 Analysis Bedtime StorieslinziyiBelum ada peringkat
- ConditionalDokumen5 halamanConditionalkomal sitaBelum ada peringkat
- Quiz 8Dokumen1 halamanQuiz 8melxies59Belum ada peringkat
- On Solving 2D and 3D Puzzles Using Curve MatchingDokumen8 halamanOn Solving 2D and 3D Puzzles Using Curve Matchingmccord411Belum ada peringkat
- Math 196, Section 57 (Vipul Naik)Dokumen157 halamanMath 196, Section 57 (Vipul Naik)Naveen suryaBelum ada peringkat
- DM Lec 12 ShortDokumen52 halamanDM Lec 12 ShortNicBelum ada peringkat
- Business Mathematics I Bba Bi New CourseDokumen2 halamanBusiness Mathematics I Bba Bi New CourseSubrat PantaBelum ada peringkat
- 36 INTEGRATION FULL PART 2 of 5 PDFDokumen20 halaman36 INTEGRATION FULL PART 2 of 5 PDFrappycatBelum ada peringkat
- Tifr 05Dokumen228 halamanTifr 05Atharva KordeBelum ada peringkat
- VS DE and HDEDokumen18 halamanVS DE and HDECarswel Hidalgo HornedoBelum ada peringkat
- E1605 Simplex AlgorithmDokumen11 halamanE1605 Simplex Algorithmdavid__mineBelum ada peringkat
- Solving Quadratic Equations PDFDokumen4 halamanSolving Quadratic Equations PDFMario CalderonBelum ada peringkat
- Structure Functions and Minimal Path SetsDokumen7 halamanStructure Functions and Minimal Path SetsNonato CoelhoBelum ada peringkat
- ECON1003 UNIT 2 Version 1 - Part 1 REV 2Dokumen29 halamanECON1003 UNIT 2 Version 1 - Part 1 REV 2Kyle MerrittBelum ada peringkat
- Summative Test No.1 dlp1 7.1Dokumen6 halamanSummative Test No.1 dlp1 7.1Fayee Mae Hyacinth MecaBelum ada peringkat
- TTI2D3 CLO1 M1 Set Theory and Venn DiagramDokumen37 halamanTTI2D3 CLO1 M1 Set Theory and Venn DiagramTV ScreenBelum ada peringkat
- Descartes Rule of Signs ProofDokumen3 halamanDescartes Rule of Signs ProofSabyasachi DebnathBelum ada peringkat
- Krishna DAADokumen45 halamanKrishna DAAAnshika MannBelum ada peringkat
- Dr. Siti Mariam Binti Abdul Rahman Faculty of Mechanical Engineering Office: T1-A14-12C E-Mail: Mariam4528@salam - Uitm.edu - MyDokumen8 halamanDr. Siti Mariam Binti Abdul Rahman Faculty of Mechanical Engineering Office: T1-A14-12C E-Mail: Mariam4528@salam - Uitm.edu - MyahmadBelum ada peringkat
- Experiment-1: AIM: Write A Program To Print "Hello World"Dokumen24 halamanExperiment-1: AIM: Write A Program To Print "Hello World"Dushyant Kumar RanaBelum ada peringkat
- HWIVDokumen2 halamanHWIVTom IBelum ada peringkat
- DS-I - Introduction To Data StructureDokumen64 halamanDS-I - Introduction To Data Structurepururaj singhBelum ada peringkat