Anda mungkin juga menyukai
- Shoe Dog: A Memoir by the Creator of NikeDari EverandShoe Dog: A Memoir by the Creator of NikePenilaian: 4.5 dari 5 bintang4.5/5 (537)
- Grit: The Power of Passion and PerseveranceDari EverandGrit: The Power of Passion and PerseverancePenilaian: 4 dari 5 bintang4/5 (587)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDari EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RacePenilaian: 4 dari 5 bintang4/5 (890)
- The Yellow House: A Memoir (2019 National Book Award Winner)Dari EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Penilaian: 4 dari 5 bintang4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingDari EverandThe Little Book of Hygge: Danish Secrets to Happy LivingPenilaian: 3.5 dari 5 bintang3.5/5 (399)
- On Fire: The (Burning) Case for a Green New DealDari EverandOn Fire: The (Burning) Case for a Green New DealPenilaian: 4 dari 5 bintang4/5 (73)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDari EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifePenilaian: 4 dari 5 bintang4/5 (5794)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDari EverandNever Split the Difference: Negotiating As If Your Life Depended On ItPenilaian: 4.5 dari 5 bintang4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDari EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FuturePenilaian: 4.5 dari 5 bintang4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDari EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryPenilaian: 3.5 dari 5 bintang3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerDari EverandThe Emperor of All Maladies: A Biography of CancerPenilaian: 4.5 dari 5 bintang4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDari EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You ArePenilaian: 4 dari 5 bintang4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDari EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyPenilaian: 3.5 dari 5 bintang3.5/5 (2219)
- Team of Rivals: The Political Genius of Abraham LincolnDari EverandTeam of Rivals: The Political Genius of Abraham LincolnPenilaian: 4.5 dari 5 bintang4.5/5 (234)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDari EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersPenilaian: 4.5 dari 5 bintang4.5/5 (344)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDari EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaPenilaian: 4.5 dari 5 bintang4.5/5 (265)
- Rise of ISIS: A Threat We Can't IgnoreDari EverandRise of ISIS: A Threat We Can't IgnorePenilaian: 3.5 dari 5 bintang3.5/5 (137)
- The Unwinding: An Inner History of the New AmericaDari EverandThe Unwinding: An Inner History of the New AmericaPenilaian: 4 dari 5 bintang4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Dari EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Penilaian: 4.5 dari 5 bintang4.5/5 (119)
- Her Body and Other Parties: StoriesDari EverandHer Body and Other Parties: StoriesPenilaian: 4 dari 5 bintang4/5 (821)
- Generator Circuit-Breaker Technical Data and DimensionsDokumen2 halamanGenerator Circuit-Breaker Technical Data and DimensionsThangarajan NagarajanBelum ada peringkat
- 1 1-ManualDokumen2 halaman1 1-ManualMiggy Ys33% (3)
- Goubau - 1981 - in Memoriam Dr. George GoubauDokumen1 halamanGoubau - 1981 - in Memoriam Dr. George GoubauAhmed AbdelraheemBelum ada peringkat
- SMV1263Series 200062DDokumen4 halamanSMV1263Series 200062Dmohamed talhaBelum ada peringkat
- Playstation (Console) : Manufacturer Product Family Type Generation Retail Availability PlaystationDokumen22 halamanPlaystation (Console) : Manufacturer Product Family Type Generation Retail Availability Playstationro_venancioBelum ada peringkat
- Datasheet - PDF 2 TriacDokumen3 halamanDatasheet - PDF 2 TriacFlabio OliveiraBelum ada peringkat
- RACH Overview and AnalysisDokumen79 halamanRACH Overview and Analysisbhushan7408Belum ada peringkat
- Basic Electrical-Chapter 3 TheoryDokumen13 halamanBasic Electrical-Chapter 3 TheorySankar RijalBelum ada peringkat
- EST-P1 User GuideDokumen58 halamanEST-P1 User GuideNinaBelum ada peringkat
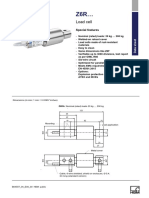
- Z6R DSDokumen8 halamanZ6R DSivanzeab2770Belum ada peringkat
- DY2300 Series Potentiostat/Bipotentiostat: HardwareDokumen2 halamanDY2300 Series Potentiostat/Bipotentiostat: HardwareHendrawan LDBelum ada peringkat
- FCC Test Report SummaryDokumen21 halamanFCC Test Report Summarysr vdeBelum ada peringkat
- 2004 Conference Proceedings on Microwave TechnologyDokumen4 halaman2004 Conference Proceedings on Microwave TechnologyNajmi Najib Nasrulloh KurniadiBelum ada peringkat
- Diodo 1 - 5ke100ca 3078726Dokumen13 halamanDiodo 1 - 5ke100ca 3078726mario avila sanchezBelum ada peringkat
- A Presentation On Vsat: Presented By: Sonam Gupta Astha Jain Surabhi Sharma Ece 7 SemesterDokumen24 halamanA Presentation On Vsat: Presented By: Sonam Gupta Astha Jain Surabhi Sharma Ece 7 SemesterSonam Gupta100% (1)
- RRC Connection: Radio BearerDokumen12 halamanRRC Connection: Radio BearerGEORGE MYLONASBelum ada peringkat
- ITU-T K.70, Series K, Protection Against Interference, Human Exposure To EMF, 2007Dokumen56 halamanITU-T K.70, Series K, Protection Against Interference, Human Exposure To EMF, 2007locusstandi84Belum ada peringkat
- GSM Frame Structure-Finalwith GraphsDokumen28 halamanGSM Frame Structure-Finalwith GraphsMohammed Fabin100% (1)
- Integrated Solutions: With Scs-BusDokumen172 halamanIntegrated Solutions: With Scs-BusRodolfo López DíazBelum ada peringkat
- Brief History of Wireless Internet and Real-Time ChatDokumen14 halamanBrief History of Wireless Internet and Real-Time Chatcharimaine hernandezBelum ada peringkat
- Measure Bit Errors with BERDokumen5 halamanMeasure Bit Errors with BERkidusBelum ada peringkat
- A Review Paper On Smart Antenna For Mobile Communication IJERTCONV5IS23014Dokumen2 halamanA Review Paper On Smart Antenna For Mobile Communication IJERTCONV5IS23014Sanjana RameshBelum ada peringkat
- Arbitrary Waveform Generator: WG810 WG820 WG1220 WG1240 WG1440 WG1475Dokumen25 halamanArbitrary Waveform Generator: WG810 WG820 WG1220 WG1240 WG1440 WG1475dawibr85Belum ada peringkat
- Echo Cancellation Final PPT NewDokumen34 halamanEcho Cancellation Final PPT NewMadhubalaBelum ada peringkat
- Canon A1 SPT Guide PDFDokumen10 halamanCanon A1 SPT Guide PDFWeijia MaBelum ada peringkat
- Product Specification PDFDokumen15 halamanProduct Specification PDFHedenarol Ramirez RojasBelum ada peringkat
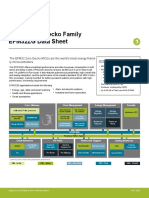
- EFM32 Zero Gecko Family EFM32ZG Data SheetDokumen104 halamanEFM32 Zero Gecko Family EFM32ZG Data SheetHans ClarinBelum ada peringkat
- Inter Trip RelayDokumen10 halamanInter Trip RelayNam Hoai Le100% (1)
- Snx5176B Differential Bus Transceivers: 1 Features 3 DescriptionDokumen26 halamanSnx5176B Differential Bus Transceivers: 1 Features 3 Descriptionwillame_nelson1945Belum ada peringkat
- Mr2920 DatasheetDokumen19 halamanMr2920 DatasheetflorianguillouBelum ada peringkat