Anda mungkin juga menyukai
- AI Planning: Introduction To Artificial IntelligenceDokumen66 halamanAI Planning: Introduction To Artificial IntelligenceSelam BihoneBelum ada peringkat
- Classical Planning Algorithms and TechniquesDokumen25 halamanClassical Planning Algorithms and Techniques朝崴Belum ada peringkat
- AI Planning Knowledge RepresentationDokumen70 halamanAI Planning Knowledge RepresentationArchana PugazhendhiBelum ada peringkat
- Intelligent Systems: PlanningDokumen68 halamanIntelligent Systems: Planningishara7777Belum ada peringkat
- Planning, Execution & Learning 1. Linear & Non - Linear PlanningDokumen31 halamanPlanning, Execution & Learning 1. Linear & Non - Linear PlanningroshankojuBelum ada peringkat
- Artificial Intelligence 1: PlanningDokumen58 halamanArtificial Intelligence 1: PlanningParth MehtaBelum ada peringkat
- Cs344 Lect15 Robotic Knowledge Inferencing Prolog 11feb08Dokumen41 halamanCs344 Lect15 Robotic Knowledge Inferencing Prolog 11feb08Ritu SharmaBelum ada peringkat
- Planning Chapter OverviewDokumen64 halamanPlanning Chapter Overviewब्राह्मण रोहित शर्माBelum ada peringkat
- Panning in AI PPT SelfDokumen17 halamanPanning in AI PPT Selfruff ianBelum ada peringkat
- Planingproblem 190308075248Dokumen76 halamanPlaningproblem 190308075248Abdela Aman MtechBelum ada peringkat
- Scsa1702 - Ai - Unit IVDokumen49 halamanScsa1702 - Ai - Unit IVLolakapuri Ananth VardhanBelum ada peringkat
- Ai Unit-4 NotesDokumen19 halamanAi Unit-4 Notesfirstandlastname1100Belum ada peringkat
- Example: Air Cargo TransportDokumen13 halamanExample: Air Cargo TransportRahulBelum ada peringkat
- Solving Problems by SearchingDokumen26 halamanSolving Problems by SearchingMahabub AlamBelum ada peringkat
- Planning: Russell and NorvigDokumen33 halamanPlanning: Russell and NorvigSarada SanjeeviBelum ada peringkat
- Artificial Intelligence Chapter 9: Inference in First-Order LogicDokumen69 halamanArtificial Intelligence Chapter 9: Inference in First-Order LogicsumantapaniBelum ada peringkat
- Chapter 09Dokumen69 halamanChapter 09smilingeyes_nicBelum ada peringkat
- Subject: Artificial Intelligence 5. Planning: Faculty Name: Anita Patil Mrs. Jyoti JoshiDokumen49 halamanSubject: Artificial Intelligence 5. Planning: Faculty Name: Anita Patil Mrs. Jyoti JoshiSarvika TiwariBelum ada peringkat
- Ai-Unit 4Dokumen25 halamanAi-Unit 4GayathriBelum ada peringkat
- AI Chapter4Dokumen29 halamanAI Chapter4Babal YepaBelum ada peringkat
- Classical Planning in AIDokumen5 halamanClassical Planning in AIpersonal pureBelum ada peringkat
- Cs344 Lect15 Robotic Knowledge Inferencing Prolog 11feb08Dokumen41 halamanCs344 Lect15 Robotic Knowledge Inferencing Prolog 11feb08StoriesofsuperheroesBelum ada peringkat
- AD18402 Class PPT PlanningDokumen35 halamanAD18402 Class PPT PlanningGanesh RathnamBelum ada peringkat
- Ai4and5 MergedDokumen308 halamanAi4and5 Mergedaasrith kommojuBelum ada peringkat
- 7Dokumen10 halaman7Doğukan DumanBelum ada peringkat
- Classical PlanningDokumen25 halamanClassical Planning2OO11AO527Mithin Kumar MBelum ada peringkat
- Planning: CMSC421 - FALL 2006Dokumen38 halamanPlanning: CMSC421 - FALL 2006CarlileCullenBelum ada peringkat
- Artificial Intelligence 3451: UNIT: 05 Planning and ReasoningDokumen32 halamanArtificial Intelligence 3451: UNIT: 05 Planning and ReasoningFarhad Muhammad RiazBelum ada peringkat
- Artificial Intelligence3-1Dokumen43 halamanArtificial Intelligence3-1Shashank ShashiBelum ada peringkat
- Frame Problem in Artificial Intelligence: Patrick J. HayesDokumen29 halamanFrame Problem in Artificial Intelligence: Patrick J. HayesVinod GangalBelum ada peringkat
- Combining Lists & Built-in Predicates in PrologDokumen24 halamanCombining Lists & Built-in Predicates in PrologKuldeep SharmaBelum ada peringkat
- 4.syntax Analysis2Dokumen50 halaman4.syntax Analysis2Pk BrandBelum ada peringkat
- ActivitySheet3 RP Informed Search and Knowledge RepresentationDokumen8 halamanActivitySheet3 RP Informed Search and Knowledge RepresentationBisma AmirBelum ada peringkat
- Be Cse 6 Cs6659 Unit IVDokumen32 halamanBe Cse 6 Cs6659 Unit IVMalar AmuBelum ada peringkat
- Unit 4 Notes FAIDokumen18 halamanUnit 4 Notes FAIUma MaheswariBelum ada peringkat
- Hierarchical PlanningDokumen20 halamanHierarchical Planningyr avinashBelum ada peringkat
- AIDokumen8 halamanAImohamed haniBelum ada peringkat
- SdfdsfdsfsDokumen48 halamanSdfdsfdsfsfreeintro0404Belum ada peringkat
- 08 SearchDokumen22 halaman08 SearchArvinder KaurBelum ada peringkat
- CS Parsing Guide Covering Top-Down, Bottom-Up, LR ParsingDokumen79 halamanCS Parsing Guide Covering Top-Down, Bottom-Up, LR Parsing刘京源Belum ada peringkat
- PLDITutorialDokumen180 halamanPLDITutorialPritom RajkhowaBelum ada peringkat
- Some Lisp History and Some Programming Language IdeasDokumen14 halamanSome Lisp History and Some Programming Language IdeasVivek ParmarBelum ada peringkat
- 18CSC305J_UNIT-4.pptx - 18CSC305J_UNIT-4.pptxDokumen77 halaman18CSC305J_UNIT-4.pptx - 18CSC305J_UNIT-4.pptxJefferson AaronBelum ada peringkat
- Chart Parsing Bottom-Up Chart ParsingDokumen5 halamanChart Parsing Bottom-Up Chart ParsingKevin DavalosBelum ada peringkat
- Unit Iv-Planning: Roadmap of Today's ClassDokumen12 halamanUnit Iv-Planning: Roadmap of Today's ClassKarthickBelum ada peringkat
- Planning 4Dokumen7 halamanPlanning 4Duy Tuấn PhạmBelum ada peringkat
- Unit 3 ResolutionDokumen40 halamanUnit 3 ResolutionShashwat Singh Chauhan (Mr. Iconic)Belum ada peringkat
- Data Structures and Algorithms: (CS210/ESO207/ESO211)Dokumen21 halamanData Structures and Algorithms: (CS210/ESO207/ESO211)Moazzam HussainBelum ada peringkat
- AI Prac 7 & 8Dokumen4 halamanAI Prac 7 & 8Manish GuptaBelum ada peringkat
- Planning Guide: What is PlanningDokumen109 halamanPlanning Guide: What is PlanningRonit SinghBelum ada peringkat
- Clase 4 - Inteligencia AritificialDokumen34 halamanClase 4 - Inteligencia AritificialLaura GomezBelum ada peringkat
- Scaling Up Planning to Complex ProblemsDokumen4 halamanScaling Up Planning to Complex ProblemsOwolabi PetersBelum ada peringkat
- Solving Problems by Searching: An Introduction to Search AlgorithmsDokumen51 halamanSolving Problems by Searching: An Introduction to Search Algorithmssaisampath katruBelum ada peringkat
- Logic Programming With Prolog: Resolution, Unification, BacktrackingDokumen34 halamanLogic Programming With Prolog: Resolution, Unification, BacktrackingIndu BalaBelum ada peringkat
- Mid Lecture 4Dokumen17 halamanMid Lecture 4Nouroj AminBelum ada peringkat
- 05 Intelligent Systems-SearchMethodsDokumen61 halaman05 Intelligent Systems-SearchMethodsRoddy LavoeBelum ada peringkat
- Logarithmic Function and Equation (Part 1)Dokumen29 halamanLogarithmic Function and Equation (Part 1)Princess AYCARDOBelum ada peringkat
- Planning and Acting in The Real WorldDokumen41 halamanPlanning and Acting in The Real WorldARTARANA BISWA PRASAN DASHBelum ada peringkat
- Introduction to Logic Programming with PrologDokumen23 halamanIntroduction to Logic Programming with PrologSanjoy PatorBelum ada peringkat
- Bresenham Line DrawingDokumen6 halamanBresenham Line DrawingTANVI78Belum ada peringkat
- A Buffer MethodDokumen3 halamanA Buffer MethodTANVI78Belum ada peringkat
- Specifications of 3 D Views PDFDokumen3 halamanSpecifications of 3 D Views PDFTANVI78Belum ada peringkat
- Ali, Hashim - 2016 - Wavelet Transform Based Technique For Text Image Localization PDFDokumen7 halamanAli, Hashim - 2016 - Wavelet Transform Based Technique For Text Image Localization PDFTANVI78Belum ada peringkat
- Computer Graphics Zhigang Xiang PDFDokumen364 halamanComputer Graphics Zhigang Xiang PDFTANVI78100% (1)
- Aher - 2015 - Text Localization and Extraction in Natural Scene Images PDFDokumen5 halamanAher - 2015 - Text Localization and Extraction in Natural Scene Images PDFTANVI78Belum ada peringkat
- ExamplesDokumen9 halamanExamplesTANVI78Belum ada peringkat
- CH 06Dokumen12 halamanCH 06TANVI78Belum ada peringkat
- Alejandro Et Al. - 2015 - Fast Text Detection For Road Scenes PDFDokumen124 halamanAlejandro Et Al. - 2015 - Fast Text Detection For Road Scenes PDFTANVI78Belum ada peringkat
- CGC Mohali BTech CSE RDBMS Assignment 1Dokumen5 halamanCGC Mohali BTech CSE RDBMS Assignment 1TANVI78Belum ada peringkat
- Unit 1stDokumen51 halamanUnit 1stTANVI78Belum ada peringkat
- What Is An IndexingDokumen6 halamanWhat Is An IndexingTANVI78Belum ada peringkat
- What Is Artificial IntelligenceUNit-1Dokumen9 halamanWhat Is Artificial IntelligenceUNit-1TANVI78Belum ada peringkat
- Uncertainty and Probabilistic ReasoningDokumen41 halamanUncertainty and Probabilistic ReasoningTANVI78Belum ada peringkat
- 21/10/04 AIPP Lecture 9: Informed Search Strategies 1Dokumen48 halaman21/10/04 AIPP Lecture 9: Informed Search Strategies 1TANVI78Belum ada peringkat
- Knowledge Representation and ReasoningDokumen34 halamanKnowledge Representation and ReasoningTANVI78Belum ada peringkat
- Unit 1stDokumen51 halamanUnit 1stTANVI78Belum ada peringkat
- File Processing: Subject: COMP6047 Algorithm and Programming Year: 2019Dokumen36 halamanFile Processing: Subject: COMP6047 Algorithm and Programming Year: 2019marvelius putraBelum ada peringkat
- Chapter 6-Multimedia Streams SynchronizationDokumen38 halamanChapter 6-Multimedia Streams SynchronizationhubillanthBelum ada peringkat
- TC500-550 User ManualDokumen107 halamanTC500-550 User ManualZeus Holguín MartínezBelum ada peringkat
- Man 02101135 eDokumen242 halamanMan 02101135 eNilakshya GhoshBelum ada peringkat
- Joint Target Tracking and Classification Using Radar and ESM SensorsDokumen17 halamanJoint Target Tracking and Classification Using Radar and ESM SensorsYumnaBelum ada peringkat
- xRIO User Manual PDFDokumen38 halamanxRIO User Manual PDFFadi Zatari0% (1)
- Grocery Inventory Management ProgramDokumen16 halamanGrocery Inventory Management ProgramDeepakKattimaniBelum ada peringkat
- Manual en Individual PDFDokumen34 halamanManual en Individual PDFJibu Hashim RaswiBelum ada peringkat
- Mining Frequent Itemsets and Association RulesDokumen59 halamanMining Frequent Itemsets and Association RulesSandeep DwivediBelum ada peringkat
- Chapter 6 Solution PDFDokumen7 halamanChapter 6 Solution PDFgauravroongtaBelum ada peringkat
- AIF20 Master GuideDokumen52 halamanAIF20 Master GuideAntonio Di BellaBelum ada peringkat
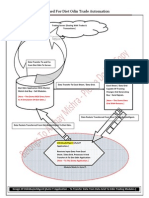
- Documentation - Diet Odin Demo ApplicationDokumen4 halamanDocumentation - Diet Odin Demo Applicationashucool23Belum ada peringkat
- Dept CSIT12 Mar 19Dokumen40 halamanDept CSIT12 Mar 19Varrshini MadhavakannaBelum ada peringkat
- Tn179 05 PDFDokumen517 halamanTn179 05 PDFchimbwaBelum ada peringkat
- Electronic Voting Machine: Project On Embedded Systems and PCB Designing GroupDokumen3 halamanElectronic Voting Machine: Project On Embedded Systems and PCB Designing GroupShashank NemaBelum ada peringkat
- Ore TheoremDokumen8 halamanOre Theoremrajananandh72138Belum ada peringkat
- Logistics ManagementDokumen4 halamanLogistics Managementeduard john antiqueraBelum ada peringkat
- Commentz-Walter: Any Better Than Aho-Corasick For Peptide Identification?Dokumen5 halamanCommentz-Walter: Any Better Than Aho-Corasick For Peptide Identification?White Globe Publications (IJORCS)Belum ada peringkat
- Infomaker PDFDokumen798 halamanInfomaker PDFanoop2010Belum ada peringkat
- SCAMPI v1.3 Status ReportDokumen50 halamanSCAMPI v1.3 Status ReportRajesh SapBelum ada peringkat
- Sepa Credit Transfer Pain 001 001 03 XML File Structure July 2013Dokumen28 halamanSepa Credit Transfer Pain 001 001 03 XML File Structure July 2013Francisco XascasBelum ada peringkat
- MC InterfacingDokumen24 halamanMC InterfacingSuhas HattiBelum ada peringkat
- MD50 - Create EIT For PassportDokumen8 halamanMD50 - Create EIT For PassportSyed Farhan AshrafBelum ada peringkat
- Robo Guide BookDokumen18 halamanRobo Guide BookVenkateswar Reddy MallepallyBelum ada peringkat
- GuiXT InputScriptDokumen8 halamanGuiXT InputScriptKumud RanjanBelum ada peringkat
- INF1511 MemoDokumen3 halamanINF1511 Memoclaudz100% (1)
- Acceptable Quality LimitDokumen5 halamanAcceptable Quality LimitGAURAV SHARMABelum ada peringkat
- 01 EE6612 MPMC Lab ManualDokumen110 halaman01 EE6612 MPMC Lab ManualManish AnandBelum ada peringkat
- Mom PDFDokumen8 halamanMom PDFThug LifeBelum ada peringkat
- MOE SEP Client Full ProtectionDokumen9 halamanMOE SEP Client Full Protectionhharun_5Belum ada peringkat
- Defensive Cyber Mastery: Expert Strategies for Unbeatable Personal and Business SecurityDari EverandDefensive Cyber Mastery: Expert Strategies for Unbeatable Personal and Business SecurityPenilaian: 5 dari 5 bintang5/5 (1)
- The Infinite Machine: How an Army of Crypto-Hackers Is Building the Next Internet with EthereumDari EverandThe Infinite Machine: How an Army of Crypto-Hackers Is Building the Next Internet with EthereumPenilaian: 3 dari 5 bintang3/5 (12)
- Scary Smart: The Future of Artificial Intelligence and How You Can Save Our WorldDari EverandScary Smart: The Future of Artificial Intelligence and How You Can Save Our WorldPenilaian: 4.5 dari 5 bintang4.5/5 (54)
- AI Superpowers: China, Silicon Valley, and the New World OrderDari EverandAI Superpowers: China, Silicon Valley, and the New World OrderPenilaian: 4.5 dari 5 bintang4.5/5 (398)
- Digital Gold: Bitcoin and the Inside Story of the Misfits and Millionaires Trying to Reinvent MoneyDari EverandDigital Gold: Bitcoin and the Inside Story of the Misfits and Millionaires Trying to Reinvent MoneyPenilaian: 4 dari 5 bintang4/5 (51)
- Algorithms to Live By: The Computer Science of Human DecisionsDari EverandAlgorithms to Live By: The Computer Science of Human DecisionsPenilaian: 4.5 dari 5 bintang4.5/5 (722)
- ChatGPT Side Hustles 2024 - Unlock the Digital Goldmine and Get AI Working for You Fast with More Than 85 Side Hustle Ideas to Boost Passive Income, Create New Cash Flow, and Get Ahead of the CurveDari EverandChatGPT Side Hustles 2024 - Unlock the Digital Goldmine and Get AI Working for You Fast with More Than 85 Side Hustle Ideas to Boost Passive Income, Create New Cash Flow, and Get Ahead of the CurveBelum ada peringkat
- Alibaba: The House That Jack Ma BuiltDari EverandAlibaba: The House That Jack Ma BuiltPenilaian: 3.5 dari 5 bintang3.5/5 (29)
- CompTIA Security+ Get Certified Get Ahead: SY0-701 Study GuideDari EverandCompTIA Security+ Get Certified Get Ahead: SY0-701 Study GuidePenilaian: 5 dari 5 bintang5/5 (2)
- Generative AI: The Insights You Need from Harvard Business ReviewDari EverandGenerative AI: The Insights You Need from Harvard Business ReviewPenilaian: 4.5 dari 5 bintang4.5/5 (2)
- ChatGPT Millionaire 2024 - Bot-Driven Side Hustles, Prompt Engineering Shortcut Secrets, and Automated Income Streams that Print Money While You Sleep. The Ultimate Beginner’s Guide for AI BusinessDari EverandChatGPT Millionaire 2024 - Bot-Driven Side Hustles, Prompt Engineering Shortcut Secrets, and Automated Income Streams that Print Money While You Sleep. The Ultimate Beginner’s Guide for AI BusinessBelum ada peringkat
- Chip War: The Quest to Dominate the World's Most Critical TechnologyDari EverandChip War: The Quest to Dominate the World's Most Critical TechnologyPenilaian: 4.5 dari 5 bintang4.5/5 (227)
- The Master Algorithm: How the Quest for the Ultimate Learning Machine Will Remake Our WorldDari EverandThe Master Algorithm: How the Quest for the Ultimate Learning Machine Will Remake Our WorldPenilaian: 4.5 dari 5 bintang4.5/5 (107)
- 8-Bit Apocalypse: The Untold Story of Atari's Missile CommandDari Everand8-Bit Apocalypse: The Untold Story of Atari's Missile CommandPenilaian: 3.5 dari 5 bintang3.5/5 (10)
- The Corporate Startup: How established companies can develop successful innovation ecosystemsDari EverandThe Corporate Startup: How established companies can develop successful innovation ecosystemsPenilaian: 4 dari 5 bintang4/5 (6)
- The Future of Geography: How the Competition in Space Will Change Our WorldDari EverandThe Future of Geography: How the Competition in Space Will Change Our WorldPenilaian: 4.5 dari 5 bintang4.5/5 (4)
- The E-Myth Revisited: Why Most Small Businesses Don't Work andDari EverandThe E-Myth Revisited: Why Most Small Businesses Don't Work andPenilaian: 4.5 dari 5 bintang4.5/5 (708)
- Mastering Large Language Models: Advanced techniques, applications, cutting-edge methods, and top LLMs (English Edition)Dari EverandMastering Large Language Models: Advanced techniques, applications, cutting-edge methods, and top LLMs (English Edition)Belum ada peringkat
- Data-ism: The Revolution Transforming Decision Making, Consumer Behavior, and Almost Everything ElseDari EverandData-ism: The Revolution Transforming Decision Making, Consumer Behavior, and Almost Everything ElsePenilaian: 3.5 dari 5 bintang3.5/5 (12)
- Blood, Sweat, and Pixels: The Triumphant, Turbulent Stories Behind How Video Games Are MadeDari EverandBlood, Sweat, and Pixels: The Triumphant, Turbulent Stories Behind How Video Games Are MadePenilaian: 4.5 dari 5 bintang4.5/5 (335)
- Reality+: Virtual Worlds and the Problems of PhilosophyDari EverandReality+: Virtual Worlds and the Problems of PhilosophyPenilaian: 4 dari 5 bintang4/5 (24)
- Everybody Lies: Big Data, New Data, and What the Internet Can Tell Us About Who We Really AreDari EverandEverybody Lies: Big Data, New Data, and What the Internet Can Tell Us About Who We Really ArePenilaian: 4.5 dari 5 bintang4.5/5 (911)