Anda mungkin juga menyukai
- MRA Project Milestone 2Dokumen20 halamanMRA Project Milestone 2Sandya Vb69% (16)
- STA Concepts and Interview Questions PDFDokumen173 halamanSTA Concepts and Interview Questions PDFAtul100% (3)
- PD Interview Questions and AnswersDokumen32 halamanPD Interview Questions and Answersvenkata ratnamBelum ada peringkat
- Example TCL Script To Extract Timing Information From A Report - Timing ReportDokumen5 halamanExample TCL Script To Extract Timing Information From A Report - Timing ReportsrajeceBelum ada peringkat
- Synopsys PrimeTime - Introduction To Static Timing Analysis WorkshopDokumen21 halamanSynopsys PrimeTime - Introduction To Static Timing Analysis WorkshopApoorva Bhatt100% (2)
- Static Timing Analysis: Cadence Design Systems, IncDokumen27 halamanStatic Timing Analysis: Cadence Design Systems, IncVakeel Mohammad Ansari100% (1)
- Floorplan Summary:: Checks Before Floorplan: Floorplan Steps: Constraints: Floorplan Check ListDokumen5 halamanFloorplan Summary:: Checks Before Floorplan: Floorplan Steps: Constraints: Floorplan Check ListSai KumarBelum ada peringkat
- VLSI Test Principles and Architectures: Design for TestabilityDari EverandVLSI Test Principles and Architectures: Design for TestabilityPenilaian: 4.5 dari 5 bintang4.5/5 (4)
- French Legal SystemDokumen3 halamanFrench Legal SystemGauravChoudharyBelum ada peringkat
- Logic Synthesis 1 PavanKVDokumen80 halamanLogic Synthesis 1 PavanKVdk13071987100% (1)
- PrimeTime SlidesDokumen47 halamanPrimeTime SlidesRamakrishnaRao SoogooriBelum ada peringkat
- Training 3Dokumen17 halamanTraining 3Thomas George100% (1)
- SynthesisDokumen51 halamanSynthesissudhir100% (1)
- SYNTHESIS-sparc by RajeshDokumen20 halamanSYNTHESIS-sparc by RajeshRajesh PerlaBelum ada peringkat
- Static Timing Analysis - MaharshiDokumen29 halamanStatic Timing Analysis - MaharshiSatish Yada100% (1)
- Cadence CommandsDokumen9 halamanCadence CommandsShashank GangradeBelum ada peringkat
- STA CornersDokumen39 halamanSTA Cornerscannister100% (1)
- Synopsys ASIC Design FlowDokumen18 halamanSynopsys ASIC Design FlowNishant Singh100% (1)
- Logic Equivalence CheckDokumen34 halamanLogic Equivalence CheckROBI PAUL100% (2)
- Physical Synthesis 2.0Dokumen52 halamanPhysical Synthesis 2.0ravishopingBelum ada peringkat
- TimingDokumen15 halamanTimingSameer BadachiBelum ada peringkat
- VLSI PD Question BankDokumen26 halamanVLSI PD Question BankSparkIntellect100% (1)
- Introduction To The Digital Flow in Mixed Environment (2 - Back End)Dokumen89 halamanIntroduction To The Digital Flow in Mixed Environment (2 - Back End)Nguyen Van ToanBelum ada peringkat
- Sta Constraints Nandan RoyDokumen6 halamanSta Constraints Nandan RoyAvas RoyBelum ada peringkat
- 2007 12 ICC Incremental TrainingDokumen129 halaman2007 12 ICC Incremental Trainingvikas.vkp50% (4)
- CommandsDokumen1 halamanCommandsraghuvlsiBelum ada peringkat
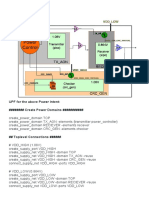
- UPF Example: UPF For The Above Power Intent: ######## Create Power Domains ###########Dokumen4 halamanUPF Example: UPF For The Above Power Intent: ######## Create Power Domains ###########Mayur Agarwal50% (2)
- The Primetime Static Timing Analysis Flow: Table 1Dokumen4 halamanThe Primetime Static Timing Analysis Flow: Table 1veeru67% (3)
- PrimetimeDokumen5 halamanPrimetimeYash PatneBelum ada peringkat
- Eco FlowDokumen25 halamanEco Flowprabhakar reddyBelum ada peringkat
- Synthesis Interview Questions. - Technology@TdzireDokumen6 halamanSynthesis Interview Questions. - Technology@TdziresrajeceBelum ada peringkat
- Low Power Upf NotesDokumen5 halamanLow Power Upf Notessaugat guhaBelum ada peringkat
- Scenario: + Mode: Supply VoltagesDokumen40 halamanScenario: + Mode: Supply VoltagesShwethBelum ada peringkat
- Static Timing Analysis-1Dokumen58 halamanStatic Timing Analysis-1Pooja selvamBelum ada peringkat
- Constraints Sta PDFDokumen92 halamanConstraints Sta PDFPudi SriharshaBelum ada peringkat
- Reducing Congestion With IC CompilerDokumen9 halamanReducing Congestion With IC Compilermaharajm98Belum ada peringkat
- Basic Tool and Understanding Upto FloorplanDokumen32 halamanBasic Tool and Understanding Upto Floorplanmayur100% (1)
- STA BasicsDokumen13 halamanSTA BasicsMaulin Sheth100% (1)
- ICC 201012 LG 05 RouteDokumen12 halamanICC 201012 LG 05 RouteBaluvu JagadishBelum ada peringkat
- Physical Design CompleteDokumen303 halamanPhysical Design CompleteVenkata KarthikBelum ada peringkat
- Interview VlsiDokumen47 halamanInterview VlsiKulwant Nagi100% (1)
- PddesignDokumen269 halamanPddesignHT Cooking Channel100% (1)
- Project ChiptopDokumen39 halamanProject ChiptopNikita Patel086Belum ada peringkat
- Team VLSI TCLDokumen7 halamanTeam VLSI TCLNaganithesh GhattamaneniBelum ada peringkat
- 7 CLK Tree SynthesisDokumen64 halaman7 CLK Tree Synthesisdharma_panga8217100% (1)
- 11timing Concepts and Physical DesignDokumen42 halaman11timing Concepts and Physical DesignTeja Reddy100% (2)
- CtsDokumen13 halamanCtsAnonymous qX2xaKBelum ada peringkat
- Sta Vlsi PDFDokumen40 halamanSta Vlsi PDFRahul YadavBelum ada peringkat
- Clock Tree Synthesis: Presentation by Sudhir Kumar MadhiDokumen69 halamanClock Tree Synthesis: Presentation by Sudhir Kumar Madhisudhir100% (2)
- Timing ClosureDokumen23 halamanTiming ClosureSasank VenkataBelum ada peringkat
- Physical Design EngineerDokumen4 halamanPhysical Design EngineerPrattipati Sumanth ChowdaryBelum ada peringkat
- Netlist Quality ChecksDokumen39 halamanNetlist Quality Checkssudhir100% (1)
- How To Find Floating - Dangling Nets, Pins, IO Ports, and Instances Using Get - DB CommandsDokumen4 halamanHow To Find Floating - Dangling Nets, Pins, IO Ports, and Instances Using Get - DB CommandsRuchy ShahBelum ada peringkat
- TempusDokumen38 halamanTempusSiva kumar100% (1)
- Understanding What Are Clock Gating Checks and How To Specify, Report and Disable These ChecksDokumen7 halamanUnderstanding What Are Clock Gating Checks and How To Specify, Report and Disable These Checksshailesh kumarBelum ada peringkat
- Basic Terminology in Physical Design VLSI Basics and Interview QuestionsDokumen14 halamanBasic Terminology in Physical Design VLSI Basics and Interview QuestionsRohith RajBelum ada peringkat
- Backend Design FlowDokumen33 halamanBackend Design FlowsudeepBelum ada peringkat
- Reg2Reg SynthesisDokumen24 halamanReg2Reg Synthesisgowtham krishnaBelum ada peringkat
- STA Prime TimeDokumen125 halamanSTA Prime TimeNishanth GowdaBelum ada peringkat
- Unit 4: Logic Synthesis: October 2009Dokumen9 halamanUnit 4: Logic Synthesis: October 2009jesus barrionuevoBelum ada peringkat
- Unit 4Dokumen26 halamanUnit 4Dr. M V GANESWARA RAOBelum ada peringkat
- Feroz Ahmed Choudhary: ObjectiveDokumen3 halamanFeroz Ahmed Choudhary: ObjectiveFeroz AhmedBelum ada peringkat
- CV MTech (VLSI&ES) 2019 PDFDokumen3 halamanCV MTech (VLSI&ES) 2019 PDFFeroz AhmedBelum ada peringkat
- Feroz Ahmed Choudhary: ObjectiveDokumen3 halamanFeroz Ahmed Choudhary: ObjectiveFeroz AhmedBelum ada peringkat
- Physical DesignDokumen71 halamanPhysical Designmaniroop100% (3)
- Feroz Choudhary: Profile SummaryDokumen5 halamanFeroz Choudhary: Profile SummaryFeroz AhmedBelum ada peringkat
- Manoj Varama SDokumen3 halamanManoj Varama SFeroz AhmedBelum ada peringkat
- TCL BasicsDokumen118 halamanTCL Basicssn10mmBelum ada peringkat
- RC LayoutDokumen29 halamanRC LayoutFeroz AhmedBelum ada peringkat
- Lodovico SlidesCarnivalDokumen4 halamanLodovico SlidesCarnivalFeroz AhmedBelum ada peringkat
- Circuit AnalysisDokumen70 halamanCircuit AnalysisFeroz AhmedBelum ada peringkat
- Timing Analysis: Path GroupDokumen18 halamanTiming Analysis: Path GroupkocchopBelum ada peringkat
- Physical Design Implementation of 32bit RISC Processor Using Synopsys ICC Primetime & StarRC XTDokumen6 halamanPhysical Design Implementation of 32bit RISC Processor Using Synopsys ICC Primetime & StarRC XTFeroz AhmedBelum ada peringkat
- Uvm MethodologyDokumen2 halamanUvm MethodologyFeroz AhmedBelum ada peringkat
- Ahb2ap BridgeDokumen3 halamanAhb2ap BridgeFeroz Ahmed100% (1)
- #STA #Constraint #Set Clock Groups #Static Timing AnalysisDokumen3 halaman#STA #Constraint #Set Clock Groups #Static Timing AnalysisFeroz AhmedBelum ada peringkat
- CIC ManualDokumen86 halamanCIC ManualFeroz AhmedBelum ada peringkat
- Library Characterization Addressing Process Variation WP PDFDokumen5 halamanLibrary Characterization Addressing Process Variation WP PDFFeroz AhmedBelum ada peringkat
- Excel FormulasDokumen2 halamanExcel FormulasJK100% (2)
- Design Verification of UmcDokumen60 halamanDesign Verification of UmcFeroz AhmedBelum ada peringkat
- Process Plant Layout - Becoming A Lost ArtDokumen7 halamanProcess Plant Layout - Becoming A Lost ArtRajendraBelum ada peringkat
- Developing Mental Health-Care Quality Indicators: Toward A Common FrameworkDokumen6 halamanDeveloping Mental Health-Care Quality Indicators: Toward A Common FrameworkCarl FisherBelum ada peringkat
- CaseDokumen2 halamanCaseKimi Walia0% (2)
- TSH TestDokumen5 halamanTSH TestdenalynBelum ada peringkat
- Management of Liver Trauma in Adults: Nasim Ahmed, Jerome J VernickDokumen7 halamanManagement of Liver Trauma in Adults: Nasim Ahmed, Jerome J VernickwiraBelum ada peringkat
- Future Dusk Portfolio by SlidesgoDokumen40 halamanFuture Dusk Portfolio by SlidesgoNATALIA ALSINA MARTINBelum ada peringkat
- Sarah Observation 4Dokumen2 halamanSarah Observation 4api-249483736Belum ada peringkat
- 02 - Nature and Role of Science in SocietyDokumen10 halaman02 - Nature and Role of Science in SocietyMarcos Jose AveBelum ada peringkat
- IC HDL Lab ManualDokumen82 halamanIC HDL Lab ManualRakshitha AngelBelum ada peringkat
- Final For Influence of OJTDokumen39 halamanFinal For Influence of OJTAnthony B. AnocheBelum ada peringkat
- Speakout Language BankDokumen7 halamanSpeakout Language BankСаша БулуєвBelum ada peringkat
- DR LukeDokumen126 halamanDR Lukegabryelbarretto7Belum ada peringkat
- JKSSB Panchayat Secretary Adfar NabiDokumen3 halamanJKSSB Panchayat Secretary Adfar NabiSHEIKHXUNIBelum ada peringkat
- Cyclosporin ARCDokumen9 halamanCyclosporin ARCSean GreenBelum ada peringkat
- What Is A Business IdeaDokumen9 halamanWhat Is A Business IdeaJhay CorpuzBelum ada peringkat
- 4complete The Min1Dokumen3 halaman4complete The Min1julia merlo vegaBelum ada peringkat
- Gallirei Weekend 2018Dokumen7 halamanGallirei Weekend 2018Reiner Albert BraunBelum ada peringkat
- 50 Life Secrets and Tips - High ExistenceDokumen12 halaman50 Life Secrets and Tips - High Existencesoapyfish100% (1)
- Invisible Rainbow A History of Electricity and LifeDokumen17 halamanInvisible Rainbow A History of Electricity and LifeLarita Nievas100% (3)
- How You Are Programmed To Be POOR and THINK Small - The MAGIC of THINKING BIGDokumen88 halamanHow You Are Programmed To Be POOR and THINK Small - The MAGIC of THINKING BIGOlegario S. Sumaya IIIBelum ada peringkat
- Pressure Sound MeasurementDokumen47 halamanPressure Sound MeasurementSaleem HaddadBelum ada peringkat
- X2ho LteDokumen7 halamanX2ho LtePrasoon PuthuvattilBelum ada peringkat
- Taschen Tradecat 2014 01 Tam 1402181720 Id 775697 PDFDokumen57 halamanTaschen Tradecat 2014 01 Tam 1402181720 Id 775697 PDFLuiza Oliveira100% (1)
- 2013 03 01 Maurizio Di Noia PresentationDokumen80 halaman2013 03 01 Maurizio Di Noia PresentationRene KotzeBelum ada peringkat
- English Reading Kit Level 1: Pupil's Assessment ManualDokumen15 halamanEnglish Reading Kit Level 1: Pupil's Assessment ManualGretylle Quicoy100% (1)
- Seerat Mujaddid Alf-e-Sani (Urdu)Dokumen518 halamanSeerat Mujaddid Alf-e-Sani (Urdu)Talib Ghaffari100% (12)
- Cns Spectrums: The Clinical Challenges of Akathisia CME Review ArticleDokumen16 halamanCns Spectrums: The Clinical Challenges of Akathisia CME Review Articledzakiyah nurul israBelum ada peringkat
- Uttar Pradesh Universities Act 1973Dokumen73 halamanUttar Pradesh Universities Act 1973ifjosofBelum ada peringkat