Anda mungkin juga menyukai
- Lec3 Image Segmentation-DpatraDokumen146 halamanLec3 Image Segmentation-DpatraRitunjay GuptaBelum ada peringkat
- Edge Detection: Phil Mlsna, PH.DDokumen34 halamanEdge Detection: Phil Mlsna, PH.Dعلي كامل الاسديBelum ada peringkat
- Basics 3Dokumen16 halamanBasics 3Mahesh N 22MVD0090Belum ada peringkat
- Marr HildrethDokumen36 halamanMarr HildrethMatteoBelum ada peringkat
- Edge Detection 03Dokumen36 halamanEdge Detection 03Tekalign TadesseBelum ada peringkat
- Filtersch3 04Dokumen37 halamanFiltersch3 04okuwobiBelum ada peringkat
- Image Segmentation-Upload1Dokumen41 halamanImage Segmentation-Upload1Monark MehtaBelum ada peringkat
- DIP3E - Chapter06A - Tran - Edge DetectionDokumen19 halamanDIP3E - Chapter06A - Tran - Edge DetectionImad AhmadBelum ada peringkat
- Lecture 3Dokumen37 halamanLecture 3bedline.salesBelum ada peringkat
- Emerging Systems: Part 1: Quantum ComputingDokumen19 halamanEmerging Systems: Part 1: Quantum ComputingSanta GeorgeBelum ada peringkat
- 10 Image Segmentation April 2019Dokumen20 halaman10 Image Segmentation April 2019Eng DlovanBelum ada peringkat
- Image Segmentation Digital Image ProcessingDokumen48 halamanImage Segmentation Digital Image Processingrao001Belum ada peringkat
- Impulse Responses of Ideal FiltersDokumen25 halamanImpulse Responses of Ideal FiltersGhubaida HassaniBelum ada peringkat
- Lec 7Dokumen39 halamanLec 7Sravankumar KastooriBelum ada peringkat
- Cp467 12 Lecture17 SegmentationDokumen66 halamanCp467 12 Lecture17 Segmentationsatyastriver1518Belum ada peringkat
- EdgeDetectionMain 2Dokumen102 halamanEdgeDetectionMain 2ShreyaSharmaBelum ada peringkat
- Seà Ales y Series L2Dokumen55 halamanSeà Ales y Series L2Elisa Pinto PulidoBelum ada peringkat
- Module 5 NoteDokumen48 halamanModule 5 NoteRohitBelum ada peringkat
- Dynamic Analysis Using FeaDokumen114 halamanDynamic Analysis Using FeaDr P Ravinder ReddyBelum ada peringkat
- Enhancement Using Local HistogramDokumen17 halamanEnhancement Using Local HistogramAnanthakrishnanBelum ada peringkat
- Edge DetectionDokumen26 halamanEdge DetectionDaksh ChhabraBelum ada peringkat
- Edge Detection and LinkingDokumen45 halamanEdge Detection and Linkingarya dadhichBelum ada peringkat
- Prob RV Opt BasicsDokumen35 halamanProb RV Opt BasicsjfdweijBelum ada peringkat
- Vision8featureextraction 28harris Sift 29Dokumen42 halamanVision8featureextraction 28harris Sift 29Muhammad Ikmal Bin MudaBelum ada peringkat
- Xor Gate: Perceptron Can Not Realize An XOR Gate. We Need More Complex Network or Use Different Transfer FunctionsDokumen12 halamanXor Gate: Perceptron Can Not Realize An XOR Gate. We Need More Complex Network or Use Different Transfer FunctionsRahul SinghBelum ada peringkat
- 8 IP Expt Sharpen Spatial Domain FilteringDokumen6 halaman8 IP Expt Sharpen Spatial Domain FilteringsamarthBelum ada peringkat
- Wavelets and MRADokumen53 halamanWavelets and MRAkusuma nadimintiBelum ada peringkat
- WINSEM2020-21 CSE4019 ETH VL2020210504006 Reference Material II 23-Mar-2021 Image SegmentationDokumen25 halamanWINSEM2020-21 CSE4019 ETH VL2020210504006 Reference Material II 23-Mar-2021 Image SegmentationMajety S LskshmiBelum ada peringkat
- Lecture 212Dokumen14 halamanLecture 212PortorBelum ada peringkat
- CS867 Lec1 Week2 EdgeDetectionDokumen88 halamanCS867 Lec1 Week2 EdgeDetectionAbbas RazaBelum ada peringkat
- Game Engine Programming 2 Week 7 Module 2Dokumen11 halamanGame Engine Programming 2 Week 7 Module 2Dean LevyBelum ada peringkat
- Math Fundamentals: 1. Conventions and Definitions 2. Matrices 3. Fundamentals of Rigid TransformsDokumen29 halamanMath Fundamentals: 1. Conventions and Definitions 2. Matrices 3. Fundamentals of Rigid TransformsZaidKhanBelum ada peringkat
- Probabilistic Robotics: SLAM: Robots Móviles UC3M Dep. de Ing. de Sistemas y AutomáticaDokumen33 halamanProbabilistic Robotics: SLAM: Robots Móviles UC3M Dep. de Ing. de Sistemas y AutomáticaSara CMBelum ada peringkat
- Eng4Bf3 Medical Image Processing: Wavelet and Multiresolution ProcessingDokumen49 halamanEng4Bf3 Medical Image Processing: Wavelet and Multiresolution ProcessingSelva KumarBelum ada peringkat
- SBRML Part1 Differential Geometry in RoboticsDokumen28 halamanSBRML Part1 Differential Geometry in Roboticsshantam bajpaiBelum ada peringkat
- Pyl101 QM L4Dokumen15 halamanPyl101 QM L4kamakshi gargBelum ada peringkat
- FilterDokumen23 halamanFilterTekalign TadesseBelum ada peringkat
- Lecture 4-Image - Enhancement in Spatial FilteringDokumen25 halamanLecture 4-Image - Enhancement in Spatial FilteringRokan UddinBelum ada peringkat
- Lec05 Invariance For WebDokumen34 halamanLec05 Invariance For WebArijit BoseBelum ada peringkat
- 30-07-2022 Unit2bDokumen66 halaman30-07-2022 Unit2bSarnithaBelum ada peringkat
- Image EnhancementDokumen84 halamanImage Enhancementyogini choudharyBelum ada peringkat
- Radial Basis Function Interpolation: Kim Day Jessie TwiggerDokumen22 halamanRadial Basis Function Interpolation: Kim Day Jessie TwiggerimranBelum ada peringkat
- Lec2-Signal and SystemDokumen36 halamanLec2-Signal and SystemIrum Nausheen Lecturer - FETBelum ada peringkat
- Smith ChartDokumen41 halamanSmith ChartBhavin V KakaniBelum ada peringkat
- 3 Non Linear ClassifiersDokumen74 halaman3 Non Linear ClassifiersVaishali DBelum ada peringkat
- Wavelets and Filter Banks: 4C8 Integrated Systems DesignDokumen41 halamanWavelets and Filter Banks: 4C8 Integrated Systems DesignShabeeb Ali OruvangaraBelum ada peringkat
- DIP Mod 4 Segement Part BDokumen39 halamanDIP Mod 4 Segement Part BshivubhavvBelum ada peringkat
- Hdout Chap 2 5210Dokumen42 halamanHdout Chap 2 5210park ji hyeBelum ada peringkat
- Multi-Resolution Analysis (MRA)Dokumen46 halamanMulti-Resolution Analysis (MRA)meenatchi5590Belum ada peringkat
- Image SegmentationDokumen105 halamanImage SegmentationAliBelum ada peringkat
- chap02 김지현Dokumen31 halamanchap02 김지현김지현Belum ada peringkat
- Lec21 EdgeDetectionDokumen45 halamanLec21 EdgeDetectionAbburi KumarBelum ada peringkat
- CS 16 JntukDokumen30 halamanCS 16 JntukKavya MamillaBelum ada peringkat
- Chapter 4. Inverse Manipulator KinematicsDokumen10 halamanChapter 4. Inverse Manipulator KinematicsSaad Ikram CheemaBelum ada peringkat
- Automation and Robotics Lect 10Dokumen23 halamanAutomation and Robotics Lect 10Debabrata PaulBelum ada peringkat
- 4.01 08 2022 - FeatureDescriptorsDokumen46 halaman4.01 08 2022 - FeatureDescriptorsSarnithaBelum ada peringkat
- Segment 5Dokumen100 halamanSegment 5priyaBelum ada peringkat
- ECE411 - 4c - The Z-Transform - Problem Set 1Dokumen2 halamanECE411 - 4c - The Z-Transform - Problem Set 1Martine JimenezBelum ada peringkat
- Lec-5 Image Analysis-Boundary DetectionDokumen77 halamanLec-5 Image Analysis-Boundary Detectionbalasha_937617969Belum ada peringkat
- Analysis and Control of Nonlinear Infinite Dimensional SystemsDari EverandAnalysis and Control of Nonlinear Infinite Dimensional SystemsBelum ada peringkat
- Difference B/W CNC and 3D PrinterDokumen2 halamanDifference B/W CNC and 3D PrinterLal ChandBelum ada peringkat
- Final Exam ScheduleDokumen1 halamanFinal Exam ScheduleLal ChandBelum ada peringkat
- Institute of Business Management (Iobm) : College of Engineering & Sciences (Ces)Dokumen3 halamanInstitute of Business Management (Iobm) : College of Engineering & Sciences (Ces)Lal ChandBelum ada peringkat
- Water: Water Supply and Water ScarcityDokumen16 halamanWater: Water Supply and Water ScarcityLal ChandBelum ada peringkat
- Institute of Business Management (Iobm) : College of Engineering & Sciences (Ces)Dokumen1 halamanInstitute of Business Management (Iobm) : College of Engineering & Sciences (Ces)Lal ChandBelum ada peringkat
- VLSI Design: Chapter #02Dokumen33 halamanVLSI Design: Chapter #02Lal ChandBelum ada peringkat
- Digital Systems and VLSI: Chapter # 01 Tahniyat AslamDokumen37 halamanDigital Systems and VLSI: Chapter # 01 Tahniyat AslamLal ChandBelum ada peringkat
- AC-DC Conversion (Rectifiers)Dokumen47 halamanAC-DC Conversion (Rectifiers)Lal ChandBelum ada peringkat
- DC-DC Switch-Mode Converters: ApplicationsDokumen16 halamanDC-DC Switch-Mode Converters: ApplicationsLal ChandBelum ada peringkat
- Week 1 Introduction To Power ElectronicsDokumen24 halamanWeek 1 Introduction To Power ElectronicsLal ChandBelum ada peringkat
- DIP Image DenoisingDokumen22 halamanDIP Image DenoisingLal ChandBelum ada peringkat
- Atif Baig (22467), Lal Chand (21591) Abdul Hannan (21618 Alveena (21651)Dokumen1 halamanAtif Baig (22467), Lal Chand (21591) Abdul Hannan (21618 Alveena (21651)Lal ChandBelum ada peringkat
- Transmition Lines: Presented byDokumen20 halamanTransmition Lines: Presented byLal ChandBelum ada peringkat
- Binary Image Analysis: Skeleton Finding Via Distance TransformDokumen43 halamanBinary Image Analysis: Skeleton Finding Via Distance TransformLal ChandBelum ada peringkat
- Lab 12 PDFDokumen2 halamanLab 12 PDFLal ChandBelum ada peringkat
- Face Recognition Using Stereo Imaging - 18 - 03 - FinalDokumen24 halamanFace Recognition Using Stereo Imaging - 18 - 03 - FinalLal ChandBelum ada peringkat
- Digital Image Processing: Image Enhancement (Spatial Filtering 1)Dokumen19 halamanDigital Image Processing: Image Enhancement (Spatial Filtering 1)Lal ChandBelum ada peringkat
- Data Compression Basics: Discrete SourceDokumen34 halamanData Compression Basics: Discrete SourceLal ChandBelum ada peringkat
- Binary Image Compression: - The Art of Modeling Image SourceDokumen25 halamanBinary Image Compression: - The Art of Modeling Image SourceLal ChandBelum ada peringkat
- Dandruff TreatmentDokumen1 halamanDandruff TreatmentLal ChandBelum ada peringkat
- Lab 9Dokumen5 halamanLab 9Lal ChandBelum ada peringkat
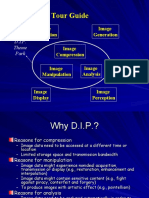
- Tour Guide: Image Acquisition Image GenerationDokumen40 halamanTour Guide: Image Acquisition Image GenerationLal ChandBelum ada peringkat
- Transmission Lines: Neha GangwarDokumen23 halamanTransmission Lines: Neha GangwarLal ChandBelum ada peringkat
- Bike LanesDokumen12 halamanBike LanesChitikala RajeshBelum ada peringkat
- Sacramento County Compensation Survey Board of SupervisorsDokumen13 halamanSacramento County Compensation Survey Board of SupervisorsCBS13Belum ada peringkat
- Win Darab V7 DatasheetDokumen3 halamanWin Darab V7 DatasheetPatrick StivénBelum ada peringkat
- Nanoimprint Lithography: Presented by Group 7Dokumen27 halamanNanoimprint Lithography: Presented by Group 7Samia SafaBelum ada peringkat
- Standard CellDokumen53 halamanStandard CellShwethBelum ada peringkat
- Calling An Oracle Stored Proc in JasperDokumen10 halamanCalling An Oracle Stored Proc in Jasperlorenzofranchi6371Belum ada peringkat
- Iraqi Portal of Knowledge and Heritage With Format Edits - 11-21-2023Dokumen6 halamanIraqi Portal of Knowledge and Heritage With Format Edits - 11-21-2023محمد الكربلائيBelum ada peringkat
- English Paper 1 Mark Scheme: Cambridge Lower Secondary Sample Test For Use With Curriculum Published in September 2020Dokumen11 halamanEnglish Paper 1 Mark Scheme: Cambridge Lower Secondary Sample Test For Use With Curriculum Published in September 2020ABEER RATHIBelum ada peringkat
- APA 6th Edition - Citation Styles APA, MLA, Chicago, Turabian, IEEE - LibGuDokumen2 halamanAPA 6th Edition - Citation Styles APA, MLA, Chicago, Turabian, IEEE - LibGuJan Louis SalazarBelum ada peringkat
- Sample Minutes of MeetingDokumen3 halamanSample Minutes of MeetingMohamad AzmeerBelum ada peringkat
- EmbOS GenericDokumen324 halamanEmbOS Genericbogd33Belum ada peringkat
- Hitachi VSP Pricelist PeppmDokumen57 halamanHitachi VSP Pricelist PeppmBahman MirBelum ada peringkat
- Character AnalysisDokumen3 halamanCharacter AnalysisjefncomoraBelum ada peringkat
- Landis+Gyr Model EM5300 Class 0.5 Electricity Meter 14-2-63Dokumen5 halamanLandis+Gyr Model EM5300 Class 0.5 Electricity Meter 14-2-63kulukundunguBelum ada peringkat
- Case For Overhead and DistributionDokumen2 halamanCase For Overhead and DistributionBhargav D.S.Belum ada peringkat
- Partnership For Sustainable Textiles - FactsheetDokumen2 halamanPartnership For Sustainable Textiles - FactsheetMasum SharifBelum ada peringkat
- SolutionsManual NewDokumen123 halamanSolutionsManual NewManoj SinghBelum ada peringkat
- A. in What Way Is Khatri A Surplus Unit?Dokumen5 halamanA. in What Way Is Khatri A Surplus Unit?Aakriti SanjelBelum ada peringkat
- Water Determination in Gases and LPG: KF MaxDokumen4 halamanWater Determination in Gases and LPG: KF MaxMohamed MosbahBelum ada peringkat
- Assessment of Locomotive and Multi-Unit Fatigue Strength Considering The Results of Certifi Cation Tests in Ukraine and EU CountriesDokumen8 halamanAssessment of Locomotive and Multi-Unit Fatigue Strength Considering The Results of Certifi Cation Tests in Ukraine and EU CountriesLeonardo Antônio Pereira100% (1)
- Manufacturing Finance With SAP ERP Financials: Subbu RamakrishnanDokumen33 halamanManufacturing Finance With SAP ERP Financials: Subbu RamakrishnanKhalifa Hassan100% (1)
- Analog Digital Thermopile Application Note PDFDokumen18 halamanAnalog Digital Thermopile Application Note PDFGopal HegdeBelum ada peringkat
- Direct MessagesDokumen338 halamanDirect Messages1Ksubs with a cod trickshotBelum ada peringkat
- ExamDokumen12 halamanExamAidar MukushevBelum ada peringkat
- Safe Use of Power Tools Rev0Dokumen92 halamanSafe Use of Power Tools Rev0mohapatrarajBelum ada peringkat
- Productstock 2021-01-18 (Produk Laku & Belum KinwatchDokumen32 halamanProductstock 2021-01-18 (Produk Laku & Belum KinwatchKin WatchBelum ada peringkat
- Manual G Ingles - V6Dokumen68 halamanManual G Ingles - V6Phùng Thế Kiên50% (2)
- Form ConstructionDokumen36 halamanForm ConstructionYhoga DheviantBelum ada peringkat
- Paper Cutting 6Dokumen71 halamanPaper Cutting 6Vidya AdsuleBelum ada peringkat
- Nickel 200 201 PDFDokumen20 halamanNickel 200 201 PDFwdavid81Belum ada peringkat