Anda mungkin juga menyukai
- Service Manual: Publication NoDokumen33 halamanService Manual: Publication Noweldsaidi43% (7)
- Flightsafety 510 SchematicDokumen86 halamanFlightsafety 510 Schematictinpena100% (1)
- DC Motor Speed Control Methods Using MATLAB - Simulink and Their Integration Into Undergraduate Electric Machinery CoursesDokumen9 halamanDC Motor Speed Control Methods Using MATLAB - Simulink and Their Integration Into Undergraduate Electric Machinery CoursesWen ZJBelum ada peringkat
- Transformer ProtectionDokumen6 halamanTransformer Protectionapi-3743746100% (2)
- Sensor NetworksDokumen120 halamanSensor NetworksUday TejaBelum ada peringkat
- Base BentlyNevadaDokumen308 halamanBase BentlyNevadaZuriel Salim Gonzalez Lopez100% (1)
- Soldadura Manual KukaDokumen78 halamanSoldadura Manual KukaEduardoBelum ada peringkat
- Gis - Elk-04 - 170 - 1HC0130351 - Ag21 - enDokumen16 halamanGis - Elk-04 - 170 - 1HC0130351 - Ag21 - enCLAVOTBelum ada peringkat
- Final Project Presentation: A I Based Traffic Control and Anomaly DetectorDokumen29 halamanFinal Project Presentation: A I Based Traffic Control and Anomaly DetectorVaisakh SugathanBelum ada peringkat
- Embedded Computer Vision System Detects Traffic ObjectsDokumen20 halamanEmbedded Computer Vision System Detects Traffic ObjectseviteBelum ada peringkat
- Traffic Density Controller: Project Guide - Prof Ravi Biradar Co-Guide - Prof Yogesh KeneDokumen17 halamanTraffic Density Controller: Project Guide - Prof Ravi Biradar Co-Guide - Prof Yogesh KeneAAKASH KHANTWALBelum ada peringkat
- A Fuzzy Rule-Based Control System For Fast Line-Following RobotsDokumen8 halamanA Fuzzy Rule-Based Control System For Fast Line-Following RobotsJithosh BabuBelum ada peringkat
- Sensors: Event-Based Feature Extraction Using Adaptive Selection ThresholdsDokumen24 halamanSensors: Event-Based Feature Extraction Using Adaptive Selection ThresholdsJoseph JoseBelum ada peringkat
- ITS For Traffic ManagementDokumen21 halamanITS For Traffic ManagementLauramfsBelum ada peringkat
- Human Fall Detection Using Optical Flow Farne Back PptDokumen15 halamanHuman Fall Detection Using Optical Flow Farne Back Pptkandulaanusha20Belum ada peringkat
- Mini Project FinalDokumen27 halamanMini Project FinalDr. crazyBelum ada peringkat
- Smartphone Based Guidance System For Visually Impaired PDFDokumen6 halamanSmartphone Based Guidance System For Visually Impaired PDFSafwan SadeqBelum ada peringkat
- Computer Vision For Driver Assistance SystemsDokumen13 halamanComputer Vision For Driver Assistance Systemstrí nguyễnBelum ada peringkat
- XsenseDokumen47 halamanXsensenanoteraCHBelum ada peringkat
- Editorial Article - Cs TrendsDokumen4 halamanEditorial Article - Cs TrendsKholid BuiBelum ada peringkat
- IMU-Based Traffic and Road Monitoring SystemDokumen12 halamanIMU-Based Traffic and Road Monitoring SystemIlham Nur AziziBelum ada peringkat
- Autonomous Vehicle and Real Time Road Lanes Detection and TrackingDokumen7 halamanAutonomous Vehicle and Real Time Road Lanes Detection and Trackingchahinez abdellaouiBelum ada peringkat
- Pedestrian Detection Based On Background Compensation With Block-Matching AlgorithmDokumen5 halamanPedestrian Detection Based On Background Compensation With Block-Matching AlgorithmSoulayma GazzehBelum ada peringkat
- Department of Computer Science and Engineering: Project Phase - I Title Finalization SeminarDokumen13 halamanDepartment of Computer Science and Engineering: Project Phase - I Title Finalization SeminarYash HulkeBelum ada peringkat
- Smart Traffic ControllerDokumen23 halamanSmart Traffic ControllerShradha PriyaBelum ada peringkat
- Oe Article Machine VisionDokumen4 halamanOe Article Machine Visionvikrant03Belum ada peringkat
- An Implementation of Moving Object Detection, Tracking and Counting Objects For Traffic Surveillance SystemDokumen6 halamanAn Implementation of Moving Object Detection, Tracking and Counting Objects For Traffic Surveillance Systematdeen sBelum ada peringkat
- Intelligent Traffic Control System Using PDFDokumen3 halamanIntelligent Traffic Control System Using PDFChalla Reethika ReddyBelum ada peringkat
- REVIEW OF VIRTUAL INSTRUMENTATIONDokumen76 halamanREVIEW OF VIRTUAL INSTRUMENTATIONVijaya Lakshmi0% (1)
- Navigation SystemDokumen22 halamanNavigation System19MCE24 Poovendhan VBelum ada peringkat
- Smart Surveillance Systems: Presented By:-Nikhil Chandrakant Sakalkar Under The Guidence Of: - Prof P M GoadDokumen16 halamanSmart Surveillance Systems: Presented By:-Nikhil Chandrakant Sakalkar Under The Guidence Of: - Prof P M GoadManish SakalkarBelum ada peringkat
- AI-Powered Smart Traffic ManagementDokumen11 halamanAI-Powered Smart Traffic ManagementsangamBelum ada peringkat
- Raspberry Pi As A Low-Cost Data Acquisition System For Human Powered VehiclesDokumen12 halamanRaspberry Pi As A Low-Cost Data Acquisition System For Human Powered VehiclesJuan Pablo AponteBelum ada peringkat
- Case Studies On The Use of Remote Monitoring and Control Systems To Solve Problems EfficientlyDokumen11 halamanCase Studies On The Use of Remote Monitoring and Control Systems To Solve Problems EfficientlyRaselle EbojoBelum ada peringkat
- On-Line Imaging of Aggregates For Process Control: T.W. Bobo JRDokumen8 halamanOn-Line Imaging of Aggregates For Process Control: T.W. Bobo JRDirceu NascimentoBelum ada peringkat
- Security - Tracking People Via of CCTVDokumen13 halamanSecurity - Tracking People Via of CCTVDivakar RBelum ada peringkat
- Application of The Computer Visiion Tecnilogy To Control of Robot ManipulatorDokumen6 halamanApplication of The Computer Visiion Tecnilogy To Control of Robot Manipulatortou kaiBelum ada peringkat
- Icaihc 2023 32Dokumen10 halamanIcaihc 2023 32svaishnavi112003Belum ada peringkat
- Intelligent Traffic Monitoring Using IoT, Image Processing and SVMDokumen19 halamanIntelligent Traffic Monitoring Using IoT, Image Processing and SVMShreyasBelum ada peringkat
- Hand Gesture Recognition Using CNNDokumen12 halamanHand Gesture Recognition Using CNNLokesh ChowdaryBelum ada peringkat
- Zhilenkov 2018Dokumen4 halamanZhilenkov 2018velasco rhoweeBelum ada peringkat
- AWN Lecture-1Dokumen36 halamanAWN Lecture-1Ahmad AwaisBelum ada peringkat
- MM Data Mining Reveals Traffic PatternsDokumen56 halamanMM Data Mining Reveals Traffic PatternsKumkumo Kussia KossaBelum ada peringkat
- Traffic Object Detection System Provides Real-Time Road Traffic DataDokumen6 halamanTraffic Object Detection System Provides Real-Time Road Traffic Datamanvimalik09Belum ada peringkat
- PHASE4 Smart Parking SyedDokumen12 halamanPHASE4 Smart Parking Syedsakthisundaresan36Belum ada peringkat
- MSC449 PrintDokumen2 halamanMSC449 PrintBangla INFO.Belum ada peringkat
- Traffic Sign ClassificationDokumen4 halamanTraffic Sign ClassificationInternational Journal of Innovative Science and Research TechnologyBelum ada peringkat
- EMBEDDED SYSTEM DESIGN GUIDEDokumen191 halamanEMBEDDED SYSTEM DESIGN GUIDEanon_468121753Belum ada peringkat
- Ullah 2019Dokumen6 halamanUllah 2019Dinar TASBelum ada peringkat
- Wireless Sensor NetworksDokumen28 halamanWireless Sensor NetworksMr.Srinivasan KBelum ada peringkat
- Development of An Autonomous Vehicle at A 1:8 ScaleDokumen13 halamanDevelopment of An Autonomous Vehicle at A 1:8 ScaleAriel BogadoBelum ada peringkat
- Smart Traffic Management Using Deep LearningDokumen3 halamanSmart Traffic Management Using Deep LearningInternational Journal of Innovative Science and Research TechnologyBelum ada peringkat
- Parking Sensing and Information System: Sensors, Deployment, and EvaluationDokumen13 halamanParking Sensing and Information System: Sensors, Deployment, and EvaluationNoobstaxD AhmedBelum ada peringkat
- Kapil's Report - 1stprogressDokumen17 halamanKapil's Report - 1stprogresssharmaharsh506325Belum ada peringkat
- Fuzzy LogicDokumen51 halamanFuzzy LogicVinay KumarBelum ada peringkat
- A Video-Based Real-Time Adaptive Vehicle-Counting System For Urban RoadsDokumen16 halamanA Video-Based Real-Time Adaptive Vehicle-Counting System For Urban Roadsatdeen sBelum ada peringkat
- Cyber-Physical System in Automotive Domain PDFDokumen11 halamanCyber-Physical System in Automotive Domain PDFBrankoBelum ada peringkat
- Major Project PPTDokumen19 halamanMajor Project PPTchowdaryganesh36Belum ada peringkat
- A Traffic Prediction For Intelligent Transportation System Using Machine LearningDokumen3 halamanA Traffic Prediction For Intelligent Transportation System Using Machine LearningT SwaroopBelum ada peringkat
- 1.2. Examples of Intelligent SystemsDokumen15 halaman1.2. Examples of Intelligent SystemsyagoencuestasBelum ada peringkat
- Eecs 4314 Conceptual Architecture ReportDokumen15 halamanEecs 4314 Conceptual Architecture Reportapi-723823461Belum ada peringkat
- Paper 8871Dokumen6 halamanPaper 8871IJARSCT JournalBelum ada peringkat
- TemporalMotionlessanalysis - MIsba SiddiquiDokumen30 halamanTemporalMotionlessanalysis - MIsba SiddiquiMisba SiddiquiBelum ada peringkat
- Integration of Open Source Platform Duckietown and Gesture Recognition As An Interactive Interface For The Museum Robotic GuideDokumen5 halamanIntegration of Open Source Platform Duckietown and Gesture Recognition As An Interactive Interface For The Museum Robotic GuideandreBelum ada peringkat
- IcetranAutonomous Car Driving One Possible Implementation Using Machine Learning AlgorithmDokumen7 halamanIcetranAutonomous Car Driving One Possible Implementation Using Machine Learning AlgorithmSaif HaqueBelum ada peringkat
- Advanced Self Driving Car Using Machine LearningDokumen5 halamanAdvanced Self Driving Car Using Machine LearningAJAST JournalBelum ada peringkat
- Pipelined Processor Farms: Structured Design for Embedded Parallel SystemsDari EverandPipelined Processor Farms: Structured Design for Embedded Parallel SystemsBelum ada peringkat
- DDBJ DNA Data Bank of JapanDokumen11 halamanDDBJ DNA Data Bank of Japanapi-37229990% (1)
- Aptno City Zip Stat: TypenamDokumen1 halamanAptno City Zip Stat: Typenamapi-3722999Belum ada peringkat
- DasDokumen3 halamanDasapi-3722999Belum ada peringkat
- Unix Q ADokumen11 halamanUnix Q Aapi-3722999Belum ada peringkat
- Tree List RecursionDokumen11 halamanTree List RecursionKranthi Kiran GuduruBelum ada peringkat
- CSE 5306 - Spring 2007 Lab2Dokumen3 halamanCSE 5306 - Spring 2007 Lab2api-3722999Belum ada peringkat
- What Is UNIX?: The UNIX Operating SystemDokumen30 halamanWhat Is UNIX?: The UNIX Operating Systemapi-3722999Belum ada peringkat
- Stack QueueDokumen24 halamanStack Queueapi-3722999Belum ada peringkat
- Most Useful QueriesDokumen26 halamanMost Useful Queriesapi-3722999Belum ada peringkat
- ReviewDokumen3 halamanReviewapi-37229990% (1)
- Stacks Queues DequesDokumen23 halamanStacks Queues Dequesapi-3722999Belum ada peringkat
- Pattern Recognition PresentationDokumen41 halamanPattern Recognition Presentationapi-3722999Belum ada peringkat
- Presentation 2Dokumen1 halamanPresentation 2api-3722999Belum ada peringkat
- Sample Beh QuestionsDokumen7 halamanSample Beh Questionsapi-3722999Belum ada peringkat
- Pre Lab 3Dokumen1 halamanPre Lab 3api-3722999Belum ada peringkat
- C EssentialsDokumen45 halamanC EssentialssuchitraprasannaBelum ada peringkat
- Pointers and MemoryDokumen31 halamanPointers and MemorySivasai KumarBelum ada peringkat
- Linked List ProblemsDokumen35 halamanLinked List ProblemsGowreesan100% (2)
- Algorithms Project ReportDokumen7 halamanAlgorithms Project Reportapi-3722999Belum ada peringkat
- Presentation 1Dokumen1 halamanPresentation 1api-3722999Belum ada peringkat
- Hash TablesDokumen4 halamanHash Tablesapi-3722999Belum ada peringkat
- VB Questionnaire 2Dokumen4 halamanVB Questionnaire 2api-3722999Belum ada peringkat
- Lab 2Dokumen9 halamanLab 2api-3722999Belum ada peringkat
- ExampleDokumen1 halamanExampleapi-3722999Belum ada peringkat
- HeapsDokumen17 halamanHeapsfirefoxextslurper100% (1)
- Linked ListDokumen43 halamanLinked Listykudura2011Belum ada peringkat
- Algorithms and CodingDokumen8 halamanAlgorithms and Codingapi-3722999Belum ada peringkat
- VB Questionnaire 1Dokumen3 halamanVB Questionnaire 1api-3722999Belum ada peringkat
- Written Test PaperDokumen9 halamanWritten Test Paperapi-3722999Belum ada peringkat
- Cba 3000Dokumen98 halamanCba 3000AlejandroBelum ada peringkat
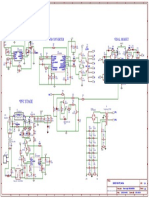
- Schematic SMPS-PFC Sheet-1 20190424001902 PDFDokumen1 halamanSchematic SMPS-PFC Sheet-1 20190424001902 PDFАлексей АндрияшBelum ada peringkat
- Earth Resistance TesterDokumen8 halamanEarth Resistance TesterAnonymous vcadX45TD7Belum ada peringkat
- Last Saved:: Date Description Last Modif Name Index-LabDokumen3 halamanLast Saved:: Date Description Last Modif Name Index-Labluiz carlos de souzaBelum ada peringkat
- Service Manual: LCD Color TelevisionDokumen66 halamanService Manual: LCD Color TelevisionFareeha GhaniBelum ada peringkat
- Edtfmt392031 Fxzq-AvmDokumen52 halamanEdtfmt392031 Fxzq-AvmEduardo RodriguezBelum ada peringkat
- Medisana Catalogue 2015 GBDokumen51 halamanMedisana Catalogue 2015 GBthallelaiosargyriouBelum ada peringkat
- Transmission Line ParametersDokumen16 halamanTransmission Line ParametersMohd Taufiq Ishak100% (1)
- Quectel L26 Hardware Design V1.4Dokumen57 halamanQuectel L26 Hardware Design V1.4Артем ВитальевичBelum ada peringkat
- Architecture CellularDokumen30 halamanArchitecture CellularThiaguBelum ada peringkat
- 3GPP TS 23.031Dokumen17 halaman3GPP TS 23.031Ahmad Mustafa AtharBelum ada peringkat
- Moonlight Serenade - GuitarDokumen1 halamanMoonlight Serenade - Guitarscook6891Belum ada peringkat
- Abbreviations B777 AC R02Dokumen6 halamanAbbreviations B777 AC R02A WongBelum ada peringkat
- Aerial Bundled Cables ABCDokumen1 halamanAerial Bundled Cables ABCasankakkadBelum ada peringkat
- Marshall Blues Breaker II Owners ManualDokumen5 halamanMarshall Blues Breaker II Owners ManualHaryo WicaksonoBelum ada peringkat
- D5020 DTS0281Dokumen4 halamanD5020 DTS0281Nikhil chaundkarBelum ada peringkat
- A New Simple Model For Land Mobile Satellite Channels: First-And Second-Order StatisticsDokumen10 halamanA New Simple Model For Land Mobile Satellite Channels: First-And Second-Order StatisticsDiliyanzah AsriBelum ada peringkat
- DTC 12 Actuator Magnetic Clutch CircuitDokumen3 halamanDTC 12 Actuator Magnetic Clutch CircuitErln LimaBelum ada peringkat
- Intruder alarm control panel manualDokumen40 halamanIntruder alarm control panel manualJohnny WalkerBelum ada peringkat
- MBI5026Dokumen16 halamanMBI5026Racer RacerBelum ada peringkat
- 358 DatasheetDokumen38 halaman358 DatasheetJual PsuBelum ada peringkat
- GifaDokumen331 halamanGifaMatiasBelum ada peringkat
- 1560 Black Stack: Thermometer Readout User's GuideDokumen187 halaman1560 Black Stack: Thermometer Readout User's GuideMorosanu Andreea-DianaBelum ada peringkat