Anda mungkin juga menyukai
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDari EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryPenilaian: 3.5 dari 5 bintang3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Dari EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Penilaian: 4.5 dari 5 bintang4.5/5 (121)
- Grit: The Power of Passion and PerseveranceDari EverandGrit: The Power of Passion and PerseverancePenilaian: 4 dari 5 bintang4/5 (588)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDari EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaPenilaian: 4.5 dari 5 bintang4.5/5 (266)
- The Little Book of Hygge: Danish Secrets to Happy LivingDari EverandThe Little Book of Hygge: Danish Secrets to Happy LivingPenilaian: 3.5 dari 5 bintang3.5/5 (400)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDari EverandNever Split the Difference: Negotiating As If Your Life Depended On ItPenilaian: 4.5 dari 5 bintang4.5/5 (838)
- Shoe Dog: A Memoir by the Creator of NikeDari EverandShoe Dog: A Memoir by the Creator of NikePenilaian: 4.5 dari 5 bintang4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerDari EverandThe Emperor of All Maladies: A Biography of CancerPenilaian: 4.5 dari 5 bintang4.5/5 (271)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDari EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifePenilaian: 4 dari 5 bintang4/5 (5794)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDari EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyPenilaian: 3.5 dari 5 bintang3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDari EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersPenilaian: 4.5 dari 5 bintang4.5/5 (344)
- Rise of ISIS: A Threat We Can't IgnoreDari EverandRise of ISIS: A Threat We Can't IgnorePenilaian: 3.5 dari 5 bintang3.5/5 (137)
- Team of Rivals: The Political Genius of Abraham LincolnDari EverandTeam of Rivals: The Political Genius of Abraham LincolnPenilaian: 4.5 dari 5 bintang4.5/5 (234)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDari EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You ArePenilaian: 4 dari 5 bintang4/5 (1090)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDari EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RacePenilaian: 4 dari 5 bintang4/5 (895)
- Her Body and Other Parties: StoriesDari EverandHer Body and Other Parties: StoriesPenilaian: 4 dari 5 bintang4/5 (821)
- Settlement Analysis of SoilsDokumen22 halamanSettlement Analysis of SoilsMuhammad Hasham100% (1)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDari EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FuturePenilaian: 4.5 dari 5 bintang4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaDari EverandThe Unwinding: An Inner History of the New AmericaPenilaian: 4 dari 5 bintang4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)Dari EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Penilaian: 4 dari 5 bintang4/5 (98)
- On Fire: The (Burning) Case for a Green New DealDari EverandOn Fire: The (Burning) Case for a Green New DealPenilaian: 4 dari 5 bintang4/5 (73)
- 2500 Busbar CalculationDokumen4 halaman2500 Busbar CalculationPramod B.Wankhade100% (1)
- AudiV6TDI MechanicsDokumen15 halamanAudiV6TDI Mechanicsmarc4266Belum ada peringkat
- Matter and Consciousness - Iain McGilcristDokumen34 halamanMatter and Consciousness - Iain McGilcristmalcrowe100% (1)
- Atomic Absorption SpectrometryDokumen36 halamanAtomic Absorption SpectrometryZubair KambohBelum ada peringkat
- AI Skills Taxonomy JuneDokumen6 halamanAI Skills Taxonomy JunePradip GuptaBelum ada peringkat
- 24-Fracturing Horizontal Wells PDFDokumen37 halaman24-Fracturing Horizontal Wells PDFmorcaronte08Belum ada peringkat
- MIDAS SteelCompositeCurvedBridgeTutorialDokumen41 halamanMIDAS SteelCompositeCurvedBridgeTutorialOscar Mendoza100% (1)
- Report On SoftenerDokumen72 halamanReport On SoftenerNipu Sen100% (4)
- Nehru Science Centre Services ReportDokumen5 halamanNehru Science Centre Services ReportPranay Vira50% (2)
- Engineering Design Process in Competition Robotics - PAPER.20091204 PDFDokumen29 halamanEngineering Design Process in Competition Robotics - PAPER.20091204 PDFPradip GuptaBelum ada peringkat
- Econometrics SampleDokumen2 halamanEconometrics SamplePradip GuptaBelum ada peringkat
- Isit437 L02Dokumen15 halamanIsit437 L02Pradip GuptaBelum ada peringkat
- Chapter 2 PDFDokumen8 halamanChapter 2 PDFPradip Gupta100% (1)
- 2011 Drive System User Guide v1bDokumen20 halaman2011 Drive System User Guide v1bPradip GuptaBelum ada peringkat
- Isit437 L01Dokumen8 halamanIsit437 L01Pradip GuptaBelum ada peringkat
- Total DerivativeDokumen8 halamanTotal DerivativePradip GuptaBelum ada peringkat
- Pulley Drive SysDokumen16 halamanPulley Drive SysrameshdesignBelum ada peringkat
- Pulleys and ForceDokumen8 halamanPulleys and ForceBegin Bahrum SianturiBelum ada peringkat
- Torque and Power PDFDokumen9 halamanTorque and Power PDFPradip GuptaBelum ada peringkat
- 2007CON Drive Systems CopioliDokumen56 halaman2007CON Drive Systems CopioliДалибор МарковићBelum ada peringkat
- m15l37 PDFDokumen5 halamanm15l37 PDFPradip GuptaBelum ada peringkat
- m16l41 PDFDokumen4 halamanm16l41 PDFPradip GuptaBelum ada peringkat
- m16l40 PDFDokumen5 halamanm16l40 PDFPradip GuptaBelum ada peringkat
- m16l40 PDFDokumen5 halamanm16l40 PDFPradip GuptaBelum ada peringkat
- WX CX CX CXC: DW EI X H DXDokumen6 halamanWX CX CX CXC: DW EI X H DXPradip GuptaBelum ada peringkat
- Approximate Methods: Module: 15 Lecture: 1Dokumen7 halamanApproximate Methods: Module: 15 Lecture: 1Pradip GuptaBelum ada peringkat
- m15l38 PDFDokumen3 halamanm15l38 PDFPradip GuptaBelum ada peringkat
- Fig. 1 Airfoil Model Mounted in Bending and Torsional SpringsDokumen4 halamanFig. 1 Airfoil Model Mounted in Bending and Torsional SpringsPradip GuptaBelum ada peringkat
- m15l38 PDFDokumen3 halamanm15l38 PDFPradip GuptaBelum ada peringkat
- m16l41 PDFDokumen4 halamanm16l41 PDFPradip GuptaBelum ada peringkat
- WX CX CX CXC: DW EI X H DXDokumen6 halamanWX CX CX CXC: DW EI X H DXPradip GuptaBelum ada peringkat
- m15l37 PDFDokumen5 halamanm15l37 PDFPradip GuptaBelum ada peringkat
- Module: 13 Lecture: 3: Rigid Body ModeDokumen4 halamanModule: 13 Lecture: 3: Rigid Body ModePradip GuptaBelum ada peringkat
- Approximate Methods: Module: 15 Lecture: 1Dokumen7 halamanApproximate Methods: Module: 15 Lecture: 1Pradip GuptaBelum ada peringkat
- m14l35 PDFDokumen3 halamanm14l35 PDFPradip GuptaBelum ada peringkat
- Fig. 1 Airfoil Model Mounted in Bending and Torsional SpringsDokumen4 halamanFig. 1 Airfoil Model Mounted in Bending and Torsional SpringsPradip GuptaBelum ada peringkat
- Module 5Dokumen5 halamanModule 5AmanNanda0% (1)
- With Viscous Damping (Under Damped)Dokumen6 halamanWith Viscous Damping (Under Damped)Pradip GuptaBelum ada peringkat
- Link 8Dokumen6 halamanLink 8Diego MtzBelum ada peringkat
- Wavelenght GuidesDokumen13 halamanWavelenght GuidesLuisAntonioRomeroBelum ada peringkat
- TDS 188-2 - RGA - CatalogueDokumen20 halamanTDS 188-2 - RGA - CatalogueClausio Junior MeloBelum ada peringkat
- Allegro QX DataSheetDokumen4 halamanAllegro QX DataSheetProfumo San Martin100% (1)
- PipephaseDokumen32 halamanPipephaseZadeh NormanBelum ada peringkat
- 1.introduction To Mechanical VibrationsDokumen64 halaman1.introduction To Mechanical Vibrationspiravi66Belum ada peringkat
- Using The CONVAL Software For The Petrochemical Plant Control Valve Checking Case StudyDokumen6 halamanUsing The CONVAL Software For The Petrochemical Plant Control Valve Checking Case Studychem_taBelum ada peringkat
- Solution: A 160 200 B 300 C 100 D 140 E 160Dokumen2 halamanSolution: A 160 200 B 300 C 100 D 140 E 160A.Kh.SBelum ada peringkat
- Sensors: A New Approach For Improving Reliability of Personal Navigation Devices Under Harsh GNSS Signal ConditionsDokumen21 halamanSensors: A New Approach For Improving Reliability of Personal Navigation Devices Under Harsh GNSS Signal ConditionsRuddy EspejoBelum ada peringkat
- Jan 2019 3h - UnlockedDokumen24 halamanJan 2019 3h - UnlockedahmedBelum ada peringkat
- Modelling of Li-Ion Batteries Using Equivalent Circuit DiagramsDokumen5 halamanModelling of Li-Ion Batteries Using Equivalent Circuit DiagramsCarlos Morales ZamoraBelum ada peringkat
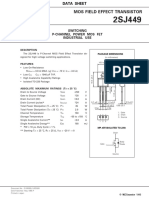
- 2SJ 449 - NecDokumen9 halaman2SJ 449 - NecStevenBelum ada peringkat
- Cows and ChickensDokumen9 halamanCows and Chickensapi-298565250Belum ada peringkat
- InggrissinkholeDokumen2 halamanInggrissinkholeRika Rika SilvianaBelum ada peringkat
- LZ96a Dist - Relay1Dokumen40 halamanLZ96a Dist - Relay1RK K0% (1)
- 6 - Pressuremeter PDFDokumen71 halaman6 - Pressuremeter PDFjenvarmatBelum ada peringkat
- Code - Bright. Constitutive Laws: Mechanical Constitutive Models Hydraulic and Thermal Constitutive ModelsDokumen34 halamanCode - Bright. Constitutive Laws: Mechanical Constitutive Models Hydraulic and Thermal Constitutive ModelsJonathan TeixeiraBelum ada peringkat
- Fluids Secondaires PDFDokumen11 halamanFluids Secondaires PDFmohand_mindietaBelum ada peringkat
- Paper 2 2001Dokumen20 halamanPaper 2 2001DisturbedPotatoBelum ada peringkat
- Johor-Answer P2-Trial SPM 2007Dokumen8 halamanJohor-Answer P2-Trial SPM 2007kamalharmozaBelum ada peringkat
- Slide 1 IntroductionDokumen9 halamanSlide 1 IntroductionMd.Tariqul Islam Rubel 2 2 2 2 0 3Belum ada peringkat