Anda mungkin juga menyukai
- Unit 5 QBDokumen21 halamanUnit 5 QBABCDEFG HOJKLMNOPBelum ada peringkat
- Solving Problems by SearchingDokumen78 halamanSolving Problems by SearchingTariq IqbalBelum ada peringkat
- Unit 2 Problem SolvingDokumen9 halamanUnit 2 Problem Solvingjskri3399Belum ada peringkat
- Lecture 3 Problems Solving by SearchingDokumen78 halamanLecture 3 Problems Solving by SearchingMd.Ashiqur RahmanBelum ada peringkat
- Unit1 Class3.1 Search StrategiesDokumen51 halamanUnit1 Class3.1 Search StrategiesTanush ReddyBelum ada peringkat
- Zeyu Tan AI Assessment ReportDokumen14 halamanZeyu Tan AI Assessment ReportAnna LionBelum ada peringkat
- Example: Air Cargo TransportDokumen13 halamanExample: Air Cargo TransportRahulBelum ada peringkat
- Lecture-3 Problems Solving by SearchingDokumen79 halamanLecture-3 Problems Solving by SearchingmusaBelum ada peringkat
- Monte-Carlo Planning in Large PomdpsDokumen9 halamanMonte-Carlo Planning in Large PomdpsNathan PearsonBelum ada peringkat
- ORDokumen34 halamanORRama RajuBelum ada peringkat
- !-IE-Exit Exam Model QuestionsDokumen74 halaman!-IE-Exit Exam Model QuestionsJibril AdileBelum ada peringkat
- PPts On Heuristic SearchDokumen21 halamanPPts On Heuristic SearchNIDHI SHARMABelum ada peringkat
- Unit 2Dokumen66 halamanUnit 2meghanaghogareBelum ada peringkat
- Optimization Algorithms in MATLABDokumen18 halamanOptimization Algorithms in MATLABYoun Seok ChoiBelum ada peringkat
- Dynamic Programming - Mirage GroupDokumen37 halamanDynamic Programming - Mirage GroupDoc SandyBelum ada peringkat
- CHE 536 Engineering Optimization: Course Policies and OutlineDokumen33 halamanCHE 536 Engineering Optimization: Course Policies and Outlineprasaad08Belum ada peringkat
- Problem Formulation & Solving by SearchDokumen37 halamanProblem Formulation & Solving by SearchtauraiBelum ada peringkat
- Particle Swarm Optimization: Function, Which Maps The Search Space To The Function Space. Since A Function Has Only OneDokumen5 halamanParticle Swarm Optimization: Function, Which Maps The Search Space To The Function Space. Since A Function Has Only OneMeltem YaktubayBelum ada peringkat
- Solving Problems by Searching: Reflex Agent Is SimpleDokumen91 halamanSolving Problems by Searching: Reflex Agent Is Simplepratima depaBelum ada peringkat
- Handling Constraints in Particle Swarm Optimization Using A Small Population SizeDokumen11 halamanHandling Constraints in Particle Swarm Optimization Using A Small Population Sizedebasishmee5808Belum ada peringkat
- Tuning of Fuzzy Logic Controller Using Genetic AlgorithmDokumen19 halamanTuning of Fuzzy Logic Controller Using Genetic AlgorithmAwadalla TaifourBelum ada peringkat
- Sistemas Autonomos Teste 2Dokumen8 halamanSistemas Autonomos Teste 2Leonor SilvaBelum ada peringkat
- An Introduction To An Introduction To Optimization Optimization Using Using Evolutionary Algorithms Evolutionary AlgorithmsDokumen45 halamanAn Introduction To An Introduction To Optimization Optimization Using Using Evolutionary Algorithms Evolutionary AlgorithmsSai Naga Sri HarshaBelum ada peringkat
- Chapter 4 Constrained Optimization: FX XR GX HX U M V PNDokumen5 halamanChapter 4 Constrained Optimization: FX XR GX HX U M V PNtamann2004Belum ada peringkat
- AdaptiDokumen6 halamanAdaptiYanuan AnggaBelum ada peringkat
- Best Fuzzy Logic PptsDokumen9 halamanBest Fuzzy Logic PptsPablo GonzalezBelum ada peringkat
- CS6700 Reinforcement Learning PA1 Jan May 2024Dokumen4 halamanCS6700 Reinforcement Learning PA1 Jan May 2024Rahul me20b145Belum ada peringkat
- Artificial Intelligence Questions SolvedDokumen17 halamanArtificial Intelligence Questions SolvedAlima NasaBelum ada peringkat
- Solving Problems by SearchingDokumen82 halamanSolving Problems by SearchingJoyfulness EphaBelum ada peringkat
- SdfdsfdsfsDokumen48 halamanSdfdsfdsfsfreeintro0404Belum ada peringkat
- Bandit Based Monte-Carlo PlanningDokumen12 halamanBandit Based Monte-Carlo PlanningArias JoseBelum ada peringkat
- Problems, Problem Space N Search (Lecture 6-11)Dokumen86 halamanProblems, Problem Space N Search (Lecture 6-11)Roshan Mishra100% (1)
- Artificial Intelligence3-1Dokumen43 halamanArtificial Intelligence3-1Shashank ShashiBelum ada peringkat
- Local Search AlgorithmsDokumen34 halamanLocal Search AlgorithmsMubasher ShahzadBelum ada peringkat
- Hall Ticket Number:: Answer Question No.1 Compulsorily. Answer ONE Question From Each UnitDokumen13 halamanHall Ticket Number:: Answer Question No.1 Compulsorily. Answer ONE Question From Each UnitLYF WITH AK KUMARBelum ada peringkat
- AI 0ML Assignment-2Dokumen7 halamanAI 0ML Assignment-2Dileep KnBelum ada peringkat
- HeuristicDokumen73 halamanHeuristicSwati HansBelum ada peringkat
- Anytime D StarDokumen10 halamanAnytime D Starnasi_balapBelum ada peringkat
- Comparison of Genetic Algorithm and Particle Swarm OptimizationDokumen6 halamanComparison of Genetic Algorithm and Particle Swarm OptimizationMikemekanicsBelum ada peringkat
- Assignment - 3 SolutionDokumen28 halamanAssignment - 3 SolutionRitesh SutraveBelum ada peringkat
- Problematica: Que Son Los GADokumen4 halamanProblematica: Que Son Los GAsiddmonBelum ada peringkat
- Unit II-AI-KCS071Dokumen45 halamanUnit II-AI-KCS071Sv tuberBelum ada peringkat
- Ai - Chapter 3Dokumen10 halamanAi - Chapter 3sale msgBelum ada peringkat
- CS361 AI Week2 Lecture1Dokumen21 halamanCS361 AI Week2 Lecture1Mohamed HanyBelum ada peringkat
- AAAI - 08 - Local Search For DCOPDokumen6 halamanAAAI - 08 - Local Search For DCOPRejeev CvBelum ada peringkat
- Ranking Refactoring Suggestions Based On Historical VolatilityDokumen30 halamanRanking Refactoring Suggestions Based On Historical VolatilityDipesh WaliaBelum ada peringkat
- Chap 3 HeuristicsDokumen9 halamanChap 3 HeuristicssakshamBelum ada peringkat
- Constraint Satisfaction and MEADokumen30 halamanConstraint Satisfaction and MEAharshita.sharma.phd23Belum ada peringkat
- State Space Search and Heuristic Search TechniquesDokumen16 halamanState Space Search and Heuristic Search Techniques28Akshay LokhandeBelum ada peringkat
- Framework For Particle Swarm Optimization With Surrogate FunctionsDokumen11 halamanFramework For Particle Swarm Optimization With Surrogate FunctionsLucas GallindoBelum ada peringkat
- DD2431 Machine Learning Lab 4: Reinforcement Learning Python VersionDokumen9 halamanDD2431 Machine Learning Lab 4: Reinforcement Learning Python VersionbboyvnBelum ada peringkat
- Lecture1423722821 56 69Dokumen14 halamanLecture1423722821 56 69Pavan GuttaBelum ada peringkat
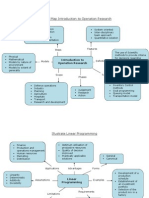
- MB0048 Concept MapDokumen14 halamanMB0048 Concept MapGopalakrishnan KuppuswamyBelum ada peringkat
- Module 2 UpdatedDokumen46 halamanModule 2 Updatedrithusagar5Belum ada peringkat
- Stewart 2004Dokumen6 halamanStewart 2004Hanan MouchtakiriBelum ada peringkat
- 6 Sigma Sample QuestDokumen12 halaman6 Sigma Sample QuestKumaran VelBelum ada peringkat
- Optimal Solution For Multi-Objective Facility Layout Problem Using Genetic AlgorithmDokumen6 halamanOptimal Solution For Multi-Objective Facility Layout Problem Using Genetic AlgorithmRyan ThorntonBelum ada peringkat
- CS50 Intro To AI With Python - NotesDokumen11 halamanCS50 Intro To AI With Python - NotesMaria AftabBelum ada peringkat
- Syllabus/Course Specifics - Fall 2009: TLT 480: Curricular Design and InnovationDokumen12 halamanSyllabus/Course Specifics - Fall 2009: TLT 480: Curricular Design and InnovationJonel BarrugaBelum ada peringkat
- A&P: The Digestive SystemDokumen79 halamanA&P: The Digestive SystemxiaoBelum ada peringkat
- Ghalib TimelineDokumen2 halamanGhalib Timelinemaryam-69Belum ada peringkat
- Counselling Goes To The Movies: Antwone Fisher (2002)Dokumen12 halamanCounselling Goes To The Movies: Antwone Fisher (2002)Azizul MohamadBelum ada peringkat
- Feline Neonatal IsoerythrolysisDokumen18 halamanFeline Neonatal IsoerythrolysisPaunas JoshiBelum ada peringkat
- Essay EnglishDokumen4 halamanEssay Englishkiera.kassellBelum ada peringkat
- Proper AdjectivesDokumen3 halamanProper AdjectivesRania Mohammed0% (2)
- Advanced Technical Analysis: - Online Live Interactive SessionDokumen4 halamanAdvanced Technical Analysis: - Online Live Interactive SessionmahendarBelum ada peringkat
- Alexander Blok - 'The King in The Square', Slavonic and East European Review, 12 (36), 1934Dokumen25 halamanAlexander Blok - 'The King in The Square', Slavonic and East European Review, 12 (36), 1934scott brodieBelum ada peringkat
- Predictive Tools For AccuracyDokumen19 halamanPredictive Tools For AccuracyVinod Kumar Choudhry93% (15)
- Nastran 2012 Superelements UgDokumen974 halamanNastran 2012 Superelements Ugds_srinivasBelum ada peringkat
- A Photograph (Q and Poetic Devices)Dokumen2 halamanA Photograph (Q and Poetic Devices)Sanya SadanaBelum ada peringkat
- RR 10-76Dokumen4 halamanRR 10-76cheska_abigail950Belum ada peringkat
- Design Thinking PDFDokumen7 halamanDesign Thinking PDFFernan SantosoBelum ada peringkat
- Why Do Firms Do Basic Research With Their Own Money - 1989 - StudentsDokumen10 halamanWhy Do Firms Do Basic Research With Their Own Money - 1989 - StudentsAlvaro Rodríguez RojasBelum ada peringkat
- Functions & Role of Community Mental Health Nursing: Srinivasan ADokumen29 halamanFunctions & Role of Community Mental Health Nursing: Srinivasan AsrinivasanaBelum ada peringkat
- Yukot,+houkelin 2505 11892735 Final+Paper+Group+41Dokumen17 halamanYukot,+houkelin 2505 11892735 Final+Paper+Group+410191720003 ELIAS ANTONIO BELLO LEON ESTUDIANTE ACTIVOBelum ada peringkat
- Analog Electronic CircuitsDokumen2 halamanAnalog Electronic CircuitsFaisal Shahzad KhattakBelum ada peringkat
- The Minecraft Survival Quest ChallengeDokumen4 halamanThe Minecraft Survival Quest Challengeapi-269630780100% (1)
- Chapter 4 - Risk Assessment ProceduresDokumen40 halamanChapter 4 - Risk Assessment ProceduresTeltel BillenaBelum ada peringkat
- Indg 264.3 w02Dokumen15 halamanIndg 264.3 w02FrauBelum ada peringkat
- Technique Du Micro-Enseignement Une Approche PourDokumen11 halamanTechnique Du Micro-Enseignement Une Approche PourMohamed NaciriBelum ada peringkat
- Leg Res Cases 4Dokumen97 halamanLeg Res Cases 4acheron_pBelum ada peringkat
- Research ProposalDokumen45 halamanResearch ProposalAaliyah Marie AbaoBelum ada peringkat
- 1973 PorbaixM LEC PDFDokumen351 halaman1973 PorbaixM LEC PDFDana Oboroceanu100% (1)
- Thermal Properties of Matter: Centre For Sceince StudyDokumen37 halamanThermal Properties of Matter: Centre For Sceince StudySalam FaithBelum ada peringkat
- ACE Resilience Questionnaires Derek Farrell 2Dokumen6 halamanACE Resilience Questionnaires Derek Farrell 2CATALINA UNDURRAGA UNDURRAGABelum ada peringkat
- Barangay Sindalan v. CA G.R. No. 150640, March 22, 2007Dokumen17 halamanBarangay Sindalan v. CA G.R. No. 150640, March 22, 2007FD BalitaBelum ada peringkat
- Glickman - The Jewish White Slavery Trade (2000)Dokumen152 halamanGlickman - The Jewish White Slavery Trade (2000)Alrik G. HamerBelum ada peringkat
- Catastrophe Claims Guide 2007Dokumen163 halamanCatastrophe Claims Guide 2007cottchen6605100% (1)