Anda mungkin juga menyukai
- Name: Roll No: AssignmentDokumen6 halamanName: Roll No: Assignmentigualdi53Belum ada peringkat
- Gear Tooth ProfileDokumen5 halamanGear Tooth ProfilepremnathgopinathanBelum ada peringkat
- Bevel GearDokumen9 halamanBevel GearAadil KhanBelum ada peringkat
- What We Need To Know About Them. Type of Gears Terminologies or Nomenclatures Forces Transmitted Design of A Gear BoxDokumen33 halamanWhat We Need To Know About Them. Type of Gears Terminologies or Nomenclatures Forces Transmitted Design of A Gear Boxfaith23dbagulBelum ada peringkat
- Kisssoft Tut 008 E Cylindrical GearpairDokumen19 halamanKisssoft Tut 008 E Cylindrical GearpairJorge Ronald Cabrera ÑaupaBelum ada peringkat
- Basics Gear TheoryDokumen7 halamanBasics Gear TheorydineshkshirsagarBelum ada peringkat
- Kisssoft Tut 010 E GearlifetimeDokumen23 halamanKisssoft Tut 010 E GearlifetimeLuis TestaBelum ada peringkat
- GT 0916Dokumen84 halamanGT 0916Davide MaranoBelum ada peringkat
- Kisssoft Tut 015 E BevelgearDokumen22 halamanKisssoft Tut 015 E BevelgearJorge Ronald Cabrera ÑaupaBelum ada peringkat
- A Comparison of Current AGMA ISO API Gear Rating Methods PDFDokumen84 halamanA Comparison of Current AGMA ISO API Gear Rating Methods PDFNARENDRASINH PARMARBelum ada peringkat
- Kisssoft Tut 016 E WormgearDokumen17 halamanKisssoft Tut 016 E WormgearDejan DrumacBelum ada peringkat
- 0116 GearsolutionsDokumen64 halaman0116 GearsolutionsignaciomarinBelum ada peringkat
- Gear TechnologyDokumen52 halamanGear TechnologyJithinBelum ada peringkat
- Gear Grinding: Software UpdateDokumen92 halamanGear Grinding: Software UpdategrazianogirottoBelum ada peringkat
- Gear Box Design: Mech 420 Major ProjectDokumen62 halamanGear Box Design: Mech 420 Major ProjectAtul DahiyaBelum ada peringkat
- Kisssoft Tut 015 E BevelgearDokumen24 halamanKisssoft Tut 015 E BevelgearDejan DrumacBelum ada peringkat
- Power Skiving PDFDokumen11 halamanPower Skiving PDFmadhavikBelum ada peringkat
- Presentation JSC FED Overall 2021Dokumen39 halamanPresentation JSC FED Overall 2021Vasyl LoginovBelum ada peringkat
- Kisssoft Tut 004 E BoltsDokumen12 halamanKisssoft Tut 004 E Boltsakbari_ukBelum ada peringkat
- A Crowning Achievement For Automotive ApplicationsDokumen10 halamanA Crowning Achievement For Automotive ApplicationsCan CemreBelum ada peringkat
- Method 514-7 Annex DDokumen11 halamanMethod 514-7 Annex DRobert WangBelum ada peringkat
- Gear Box - Industrial ApplicationsDokumen17 halamanGear Box - Industrial ApplicationsVinayak Mandrawadker100% (1)
- 4319B - Flank Modifications in Bevel Gears Using A UMCDokumen22 halaman4319B - Flank Modifications in Bevel Gears Using A UMCRaul PerezBelum ada peringkat
- 2 Gear BasicsDokumen6 halaman2 Gear BasicsMohamed Adel RizkBelum ada peringkat
- Product Catalogue-300M Series Modular Planetary Gearboxes IE2-IE3 - ENG - R02 - 0Dokumen598 halamanProduct Catalogue-300M Series Modular Planetary Gearboxes IE2-IE3 - ENG - R02 - 0Dispatch TranstechgearsBelum ada peringkat
- AGMADokumen7 halamanAGMADipakBelum ada peringkat
- Review and Comparison of LTCA in Commercial Gear Software - ADF - SMT User Conference - 10 - 21 - 19 PDFDokumen23 halamanReview and Comparison of LTCA in Commercial Gear Software - ADF - SMT User Conference - 10 - 21 - 19 PDFAdam FoltzBelum ada peringkat
- Kisssoft Changelog Version 2020 - Service Pack 4: WrongDokumen14 halamanKisssoft Changelog Version 2020 - Service Pack 4: WrongpasswordBelum ada peringkat
- A Method To Optimize Brass Type Single Synchronizer Ring For Manual GearboxDokumen6 halamanA Method To Optimize Brass Type Single Synchronizer Ring For Manual GearboxaravindhBelum ada peringkat
- 0611 GearSolutionsDokumen72 halaman0611 GearSolutionspoorianaBelum ada peringkat
- Cooling and Lubrication of High-Speed Helical GearsDokumen5 halamanCooling and Lubrication of High-Speed Helical GearsAlfand Altamirano LetnanpampatBelum ada peringkat
- A Novel Hob Design: For Precision Involute GearsDokumen11 halamanA Novel Hob Design: For Precision Involute GearsKalyan ChakravarthyBelum ada peringkat
- Gears KinematicsDokumen19 halamanGears Kinematicsavinashn12Belum ada peringkat
- Comparison of AGMA .2001, and ISO, 6336 Ratings Tor Four Gear Sets-McvittieDokumen4 halamanComparison of AGMA .2001, and ISO, 6336 Ratings Tor Four Gear Sets-McvittiewholenumberBelum ada peringkat
- Spur Gears: Are Used in Transmitting Torque Between Parallel ShaftsDokumen31 halamanSpur Gears: Are Used in Transmitting Torque Between Parallel ShaftsDipakBelum ada peringkat
- SKF Cylindrical Roller BearingsDokumen17 halamanSKF Cylindrical Roller Bearingsrick_santosBelum ada peringkat
- gt0519 PDFDokumen68 halamangt0519 PDFАндрей ГайнановBelum ada peringkat
- Thermal Lead Correction For High-Speed Gears: Sinto America, IncDokumen92 halamanThermal Lead Correction For High-Speed Gears: Sinto America, IncRongbaaz BongBelum ada peringkat
- Gearmanufacturing MethodsDokumen9 halamanGearmanufacturing Methodskumar pBelum ada peringkat
- Lecture 06 Grinding AMS Jan29 23Dokumen69 halamanLecture 06 Grinding AMS Jan29 23QAQC GCCBelum ada peringkat
- Introduction To GearsDokumen28 halamanIntroduction To Gearssandeep_gaikwad2100% (4)
- Gear DesignDokumen83 halamanGear DesignmuhammadaminjamalmutBelum ada peringkat
- Production Technology (IV Sem)Dokumen24 halamanProduction Technology (IV Sem)Shubham AgrawalBelum ada peringkat
- Power Transmission PDFDokumen5 halamanPower Transmission PDFAnonymous MiiUYUBelum ada peringkat
- Ansi Agma 2000 A88Dokumen4 halamanAnsi Agma 2000 A88MickloSoberanBelum ada peringkat
- Helicoil Catalog - hc2000 Rev.5Dokumen36 halamanHelicoil Catalog - hc2000 Rev.5Hugo CastroBelum ada peringkat
- Bev Gear Design PDFDokumen5 halamanBev Gear Design PDFMawan BentzBelum ada peringkat
- Gears - Engineering InformationDokumen138 halamanGears - Engineering InformationGiang T LeBelum ada peringkat
- How To Measure The Pressure Angle of A Physical Spur GearDokumen16 halamanHow To Measure The Pressure Angle of A Physical Spur Gearian_new100% (2)
- Gears: A Gear Is A Wheel With Teeth On Its Outer Edge. The Teeth of One Gear Mesh (Or Engage) With The Teeth of AnotherDokumen12 halamanGears: A Gear Is A Wheel With Teeth On Its Outer Edge. The Teeth of One Gear Mesh (Or Engage) With The Teeth of AnotherAniruddh SinghBelum ada peringkat
- Bonfiglioli Geared MotorDokumen584 halamanBonfiglioli Geared MotorProdip SarkarBelum ada peringkat
- MODULE 6 - Spur GearDokumen13 halamanMODULE 6 - Spur GearBoris PalaoBelum ada peringkat
- 5.0 GearsDokumen9 halaman5.0 GearsMaggy IrunguBelum ada peringkat
- 7 Gears: 7.1 Gear ClassificationDokumen15 halaman7 Gears: 7.1 Gear ClassificationSimrit Kaur MakanBelum ada peringkat
- Introduction To Mechanisms: 7 GearsDokumen15 halamanIntroduction To Mechanisms: 7 GearsDezert EagleBelum ada peringkat
- Gears: Looking For GATE Preparation Material? Join & Get Here Now!Dokumen8 halamanGears: Looking For GATE Preparation Material? Join & Get Here Now!Akash SoniBelum ada peringkat
- Gear Classification: Page - 1Dokumen12 halamanGear Classification: Page - 1maloyBelum ada peringkat
- Introduction To Mechanisms: 7 GearsDokumen15 halamanIntroduction To Mechanisms: 7 GearsgauravthamanBelum ada peringkat
- Universidad Autónoma de Querétaro.: Facultad de Ingeniería. Ingeniería ElectromecánicaDokumen16 halamanUniversidad Autónoma de Querétaro.: Facultad de Ingeniería. Ingeniería ElectromecánicaSalvador Vega MancillaBelum ada peringkat
- Gear Theory 1Dokumen164 halamanGear Theory 1suneel kumar rathoreBelum ada peringkat
- ExergyDokumen64 halamanExergyAndree RosalesBelum ada peringkat
- Srikage &creepDokumen10 halamanSrikage &creepsandeepuaeBelum ada peringkat
- F AdaptersDokumen122 halamanF Adaptersxuanphuong2710Belum ada peringkat
- Qut EN01 32720 Int Cms UnitDokumen40 halamanQut EN01 32720 Int Cms UnitMohammed RizwanBelum ada peringkat
- Rebound HammerDokumen6 halamanRebound Hammerahmadfarriz100% (1)
- JOHN - DEERE - 360plus Rotary Harvesting UnitDokumen136 halamanJOHN - DEERE - 360plus Rotary Harvesting UnitАлександр CheryBelum ada peringkat
- Cigweld Weldskill 170 HF PDFDokumen48 halamanCigweld Weldskill 170 HF PDFRizaBelum ada peringkat
- Info 116 enDokumen87 halamanInfo 116 enZona Educación Especial ZacapaoaxtlaBelum ada peringkat
- CM P1 11604 en SKF Vibration Sensors CatalogDokumen140 halamanCM P1 11604 en SKF Vibration Sensors CatalogMarcelo MallmannBelum ada peringkat
- Tension PileDokumen81 halamanTension PileVera CupezBelum ada peringkat
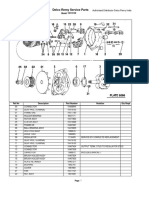
- Delco Remy Service Parts: New Indo Trading Company Authorised Distributor Delco Remy IndiaDokumen2 halamanDelco Remy Service Parts: New Indo Trading Company Authorised Distributor Delco Remy IndiaWilson AcostaBelum ada peringkat
- XE145F Presentation AUMDokumen21 halamanXE145F Presentation AUMrudyBelum ada peringkat
- Cross Flow Part 1Dokumen5 halamanCross Flow Part 1mohmmad othmanBelum ada peringkat
- Demag Vinç BilgileriDokumen28 halamanDemag Vinç BilgileriZahid ArıcıBelum ada peringkat
- The Gas Laws: Cortez Vince Robert Linghon QuishaDokumen10 halamanThe Gas Laws: Cortez Vince Robert Linghon QuishaZ ACERBelum ada peringkat
- Surface Vehicle Standard: (R) Hydraulic Hose FittingsDokumen34 halamanSurface Vehicle Standard: (R) Hydraulic Hose FittingsLUCIANO SOTOBelum ada peringkat
- Lecture No. 2: Maxwell Equations and Special Relativity in AcceleratorsDokumen22 halamanLecture No. 2: Maxwell Equations and Special Relativity in AcceleratorsEkky AndreanBelum ada peringkat
- 1K 2K Service Manual 4th GenDokumen305 halaman1K 2K Service Manual 4th GenElectronica coetc100% (1)
- Alternator ManualDokumen734 halamanAlternator ManualЕгор ГоряевBelum ada peringkat
- YhhjjDokumen52 halamanYhhjjSam CunananBelum ada peringkat
- Lesson Learned: Solution of The ProblemDokumen1 halamanLesson Learned: Solution of The ProblemRadovanZivanovicRashaBelum ada peringkat
- MTO Indowater 2019Dokumen5 halamanMTO Indowater 2019Muhammad Ilham Al FaizBelum ada peringkat
- Perform-3d-V5 0 0Dokumen15 halamanPerform-3d-V5 0 0Darley MauricioBelum ada peringkat
- Whirlpool Duet Washer Component TestingDokumen6 halamanWhirlpool Duet Washer Component TestingSamurai Appliance Repair Man50% (2)
- An Industry Project Report 2Dokumen64 halamanAn Industry Project Report 2Meet PanchasaraBelum ada peringkat
- Student Exploration: Air Track: Name: Akshat Date:12/15/20Dokumen9 halamanStudent Exploration: Air Track: Name: Akshat Date:12/15/20Akshat Pant100% (8)
- lm2500 LubesupplyDokumen3 halamanlm2500 LubesupplyDenis Jimenez100% (2)
- Operating ACE For Downhole BlendersDokumen187 halamanOperating ACE For Downhole BlendersFrank N100% (3)
- Session 2Dokumen74 halamanSession 2Syed Shahzad AliBelum ada peringkat
- TDS Therminol D12 Rodun Int GBDokumen5 halamanTDS Therminol D12 Rodun Int GBanushaBelum ada peringkat