Anda mungkin juga menyukai
- Peta KalbarDokumen1 halamanPeta Kalbarvivadelavida100% (5)
- 3.1.23. Peta Zonasi Cilandak (Jakarta Selatan)Dokumen1 halaman3.1.23. Peta Zonasi Cilandak (Jakarta Selatan)Hendry Wijaya67% (3)
- 27 Peta Wilayah Prov Sulsel PDFDokumen1 halaman27 Peta Wilayah Prov Sulsel PDFMuh Hidayat Nur WahidBelum ada peringkat
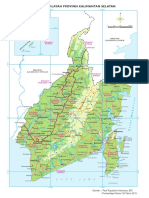
- 22 Peta Wilayah Prov Kalsel PDFDokumen1 halaman22 Peta Wilayah Prov Kalsel PDFmuh_akbar2451Belum ada peringkat
- SKR 14 73 09036Dokumen1 halamanSKR 14 73 09036ardiwahono33Belum ada peringkat
- 02 Peta Wilayah Prov SumutDokumen1 halaman02 Peta Wilayah Prov SumutMuhammad FahaBelum ada peringkat
- Layout Jaringan Irigasi SidomulyoDokumen1 halamanLayout Jaringan Irigasi Sidomulyowahyu prasetyoBelum ada peringkat
- DED Peningkatan Jaringan Irigasi D.I. Gondang Lanjutan IIDokumen180 halamanDED Peningkatan Jaringan Irigasi D.I. Gondang Lanjutan IIAinun JariyahBelum ada peringkat
- 2.BoQ - Pembangunan Gedung Kantor KKP Wilker Pelabuhan ParepareDokumen77 halaman2.BoQ - Pembangunan Gedung Kantor KKP Wilker Pelabuhan PareparePRIMATAMA KONSULTAMABelum ada peringkat
- Al HujuratDokumen2 halamanAl HujuratRiswantoBelum ada peringkat
- PLANDokumen1 halamanPLANadrio digitalBelum ada peringkat
- Peta Wilayah Prov DI YogyakartaDokumen1 halamanPeta Wilayah Prov DI Yogyakartalintangp2updBelum ada peringkat
- Infografia Buk AppDokumen1 halamanInfografia Buk Appg.p.1maggotBelum ada peringkat
- 22 Peta Wilayah Prov Kalsel PDFDokumen1 halaman22 Peta Wilayah Prov Kalsel PDFmuh_akbar2451Belum ada peringkat
- Bhaktivinoda Thakura Hari Nama CintamaniDokumen111 halamanBhaktivinoda Thakura Hari Nama CintamaniquestionesequestioneBelum ada peringkat
- Tabel PVIF-jika Aliran Kas Tiap Tahun BerbedaDokumen4 halamanTabel PVIF-jika Aliran Kas Tiap Tahun Berbedarahmawati saumaBelum ada peringkat
- 03 Peta Wilayah Prov Sumbar PDFDokumen1 halaman03 Peta Wilayah Prov Sumbar PDFLoveani YastikaBelum ada peringkat
- Haruskah Putra Daerah Menjadi Kepala DaerahDokumen2 halamanHaruskah Putra Daerah Menjadi Kepala DaerahUPT SD NEGERI 115 GRESIKBelum ada peringkat
- Surat Al-KahfiDokumen5 halamanSurat Al-KahfiAbu ZahiraBelum ada peringkat
- Latihan Al-Quran Tahun 3Dokumen4 halamanLatihan Al-Quran Tahun 3Nurul SakinahBelum ada peringkat
- C. Surat Pernyataan Kesedian DitugasDokumen1 halamanC. Surat Pernyataan Kesedian DitugasJoni AlfadiraBelum ada peringkat
- Buku GanjaranDokumen10 halamanBuku GanjaranSue2511Belum ada peringkat
- SKR 11 71 03023Dokumen2 halamanSKR 11 71 03023Ageng Aji AryasatyaBelum ada peringkat
- Peta Sungai DAS WiruDokumen1 halamanPeta Sungai DAS WiruWahyu SetiyonoBelum ada peringkat
- 27 Peta Wilayah Prov SulselDokumen1 halaman27 Peta Wilayah Prov Sulsel17crushBelum ada peringkat
- 3.1.27. Peta Zonasi Mampang Prapatan (Jakarta Selatan)Dokumen1 halaman3.1.27. Peta Zonasi Mampang Prapatan (Jakarta Selatan)Bima AndriansyahBelum ada peringkat
- 06 Peta Wilayah Prov Sumsel PDFDokumen1 halaman06 Peta Wilayah Prov Sumsel PDFNazam1902Belum ada peringkat
- 34 Peta Wilayah Prov Papua Barat PDFDokumen1 halaman34 Peta Wilayah Prov Papua Barat PDFMuhammad AriefBelum ada peringkat
- Ahmad Yani - Site PlanDokumen1 halamanAhmad Yani - Site PlandedeBelum ada peringkat
- Peta Zonasi Kecamatan Jagakarsa 2016Dokumen1 halamanPeta Zonasi Kecamatan Jagakarsa 2016Reza Pahlevi100% (1)
- 2.situasi Jampea (Hal 1)Dokumen1 halaman2.situasi Jampea (Hal 1)HusniFazriBelum ada peringkat
- Contoh Kajian Tindakan - MatematikDokumen25 halamanContoh Kajian Tindakan - MatematiksuzilaBelum ada peringkat
- 3 Tips Menjadi Seorang Desainer Logo ProfesionalDokumen51 halaman3 Tips Menjadi Seorang Desainer Logo ProfesionalNelly HasriBelum ada peringkat
- GasibuuuDokumen1 halamanGasibuuuseftiyandiBelum ada peringkat
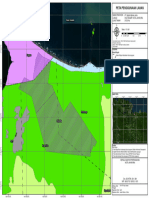
- Peta Penggunaan Lahan: EnggrosDokumen1 halamanPeta Penggunaan Lahan: EnggrosWahyu SetiyonoBelum ada peringkat
- Arahan Pemanfaatan HutanDokumen5 halamanArahan Pemanfaatan HutanKatri Sulis100% (1)
- Peta Sungai DAS NanoDokumen1 halamanPeta Sungai DAS NanoWahyu SetiyonoBelum ada peringkat
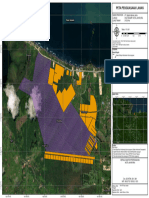
- Peta Penguasaan Lahan: EnggrosDokumen1 halamanPeta Penguasaan Lahan: EnggrosWahyu SetiyonoBelum ada peringkat
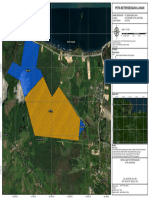
- Peta Ketersediaan Lahan: Teluk YoutefaDokumen1 halamanPeta Ketersediaan Lahan: Teluk YoutefaWahyu SetiyonoBelum ada peringkat
- (Kebakaran Hutan PontianakDokumen1 halaman(Kebakaran Hutan PontianakMitha ameliaBelum ada peringkat
- PETA Jaringan JalanDokumen1 halamanPETA Jaringan JalanBinamargaBelum ada peringkat
- Peta Kawasan Transmigrasi Klamono-SegunDokumen1 halamanPeta Kawasan Transmigrasi Klamono-SegunDrone KatongBelum ada peringkat
- Peta Kemampuan Tanah: EnggrosDokumen1 halamanPeta Kemampuan Tanah: EnggrosWahyu SetiyonoBelum ada peringkat
- 5024 - Jaringan SungaiDokumen1 halaman5024 - Jaringan SungaiTheresia Ruth Monica SigalinggingBelum ada peringkat
- Teluk Youtefa: EnggrosDokumen1 halamanTeluk Youtefa: EnggrosWahyu SetiyonoBelum ada peringkat
- Teluk Youtefa: EnggrosDokumen1 halamanTeluk Youtefa: EnggrosWahyu SetiyonoBelum ada peringkat
- Peta Sungai DAS ToarimDokumen1 halamanPeta Sungai DAS ToarimWahyu SetiyonoBelum ada peringkat
- Bahaya Banjir Kota PontianakDokumen1 halamanBahaya Banjir Kota PontianaksultanBelum ada peringkat
- MASTERPLAN BHE BARU-Rincican ApartemenDokumen1 halamanMASTERPLAN BHE BARU-Rincican ApartemenFajar Nur AlamBelum ada peringkat
- MASTERPLAN BHE BARU-Rincian Pembangunan Bogor AquagameDokumen1 halamanMASTERPLAN BHE BARU-Rincian Pembangunan Bogor AquagameFajar Nur AlamBelum ada peringkat
- Tanque DieselDokumen1 halamanTanque DieselJuan Ivan TrinidadBelum ada peringkat
- Layout MP Test Rubble WallDokumen1 halamanLayout MP Test Rubble WallAs-Syaff ResourcesBelum ada peringkat
- Tabel Respon Time RiDokumen2 halamanTabel Respon Time RiRiga Ayu DinarBelum ada peringkat
- Redesign Fix Pompa Kebraon (Verif Tenaga Ahli Jimerto)Dokumen29 halamanRedesign Fix Pompa Kebraon (Verif Tenaga Ahli Jimerto)bonekmania 109Belum ada peringkat