Anda mungkin juga menyukai
- SK Lolos Tahap Abstrak NIPRO 2023Dokumen7 halamanSK Lolos Tahap Abstrak NIPRO 2023MuhamadRidwanApriansyahBelum ada peringkat
- Struktur Kurikulum SMK - MAKDokumen9 halamanStruktur Kurikulum SMK - MAKIraBelum ada peringkat
- Lailan Abstrak Karakteristik Batako Dari Limbah PlastikDokumen1 halamanLailan Abstrak Karakteristik Batako Dari Limbah PlastikMuhamadRidwanApriansyahBelum ada peringkat
- Perwal 32 Tahun 2011Dokumen6 halamanPerwal 32 Tahun 2011MuhamadRidwanApriansyahBelum ada peringkat
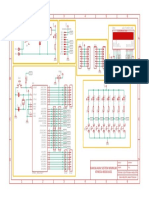
- Skematik Sistem Minimum ATMEGADokumen1 halamanSkematik Sistem Minimum ATMEGAMuhamadRidwanApriansyahBelum ada peringkat
- Kaldik 2019-2020 Jateng PDFDokumen51 halamanKaldik 2019-2020 Jateng PDFamaliaBelum ada peringkat
- Bahan Ajar KD 3.5Dokumen1 halamanBahan Ajar KD 3.5MuhamadRidwanApriansyahBelum ada peringkat
- Zerosick3 12011Dokumen38 halamanZerosick3 12011MuhamadRidwanApriansyahBelum ada peringkat
- Pendaftaran Tim Robot Uny 2016 VandoDokumen3 halamanPendaftaran Tim Robot Uny 2016 VandoMuhamadRidwanApriansyahBelum ada peringkat