Anda mungkin juga menyukai
- Sistem Navigasi Berbasis Maze Mapping Pada Robot Beroda Pemadam APIDokumen107 halamanSistem Navigasi Berbasis Maze Mapping Pada Robot Beroda Pemadam APIMuhamad SyukronBelum ada peringkat
- Gangguan Pada Sistem Tenaga ListrikDokumen18 halamanGangguan Pada Sistem Tenaga ListrikBaguz MuhammadBelum ada peringkat
- TEKNIK ELEKTRONIKA DIGITALDokumen86 halamanTEKNIK ELEKTRONIKA DIGITALAndre Apa AdanyaBelum ada peringkat
- Informasi Umum Kri Pandemi 2020Dokumen77 halamanInformasi Umum Kri Pandemi 2020ria anjeliBelum ada peringkat
- Materi Dan Tugas Mikrokontroler XTKR1 Andry FakhrurizalDokumen21 halamanMateri Dan Tugas Mikrokontroler XTKR1 Andry FakhrurizalMuhamad SyukronBelum ada peringkat
- Hasim Ashari 14502244005 ADokumen121 halamanHasim Ashari 14502244005 AMuhamad SyukronBelum ada peringkat
- Jagoan ArduinoDokumen39 halamanJagoan ArduinoAnggara T NugrahaBelum ada peringkat
- Prototype Robot Penunjuk Lokasi Bidang B 19379a2eDokumen8 halamanPrototype Robot Penunjuk Lokasi Bidang B 19379a2eMuhamad SyukronBelum ada peringkat
- Juklak Kri Daring 2020 PDFDokumen88 halamanJuklak Kri Daring 2020 PDFRahma SeptiningrumBelum ada peringkat
- BelajarArduinoWidodo PDFDokumen92 halamanBelajarArduinoWidodo PDFzed04321 zed0Belum ada peringkat
- Halaman Judul: Perancangan Kontrol Stabilitas Hexapod Robot Menggunakan MetodeDokumen113 halamanHalaman Judul: Perancangan Kontrol Stabilitas Hexapod Robot Menggunakan MetodeMuhamad SyukronBelum ada peringkat
- Metode Ziegler - Nichols - WikipediaDokumen2 halamanMetode Ziegler - Nichols - WikipediaMuhamad SyukronBelum ada peringkat
- Ada Flowchart Nya Sistem Kendali Motor DC Berbasis FreeRTOS Dengan Menggunakan Arduino Uno - Kuliah Perancangan Sistem EmbeddedDokumen13 halamanAda Flowchart Nya Sistem Kendali Motor DC Berbasis FreeRTOS Dengan Menggunakan Arduino Uno - Kuliah Perancangan Sistem EmbeddedMuhamad SyukronBelum ada peringkat
- Buku Pedoman Kompetisi Ilmiah LIPI 2021.fxDokumen27 halamanBuku Pedoman Kompetisi Ilmiah LIPI 2021.fxNxvaBelum ada peringkat
- BelajarArduinoWidodo PDFDokumen92 halamanBelajarArduinoWidodo PDFzed04321 zed0Belum ada peringkat
- Pembahasan TWK SKD CPNS 2019 No. 21 - 30 Bagian 2Dokumen7 halamanPembahasan TWK SKD CPNS 2019 No. 21 - 30 Bagian 2Muhamad SyukronBelum ada peringkat
- Dasar Dasar Fuzzy LogicDokumen63 halamanDasar Dasar Fuzzy LogicIndra Santika Graha100% (1)
- Quantenschaum - Telur-Inkubator - Inkubator Yang Dikendalikan Adruino Untuk Telur AyamDokumen11 halamanQuantenschaum - Telur-Inkubator - Inkubator Yang Dikendalikan Adruino Untuk Telur AyamMuhamad SyukronBelum ada peringkat
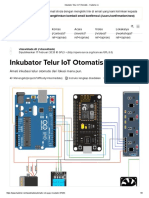
- Inkubator Telur IoT Otomatis - Hackster - IoDokumen8 halamanInkubator Telur IoT Otomatis - Hackster - IoMuhamad SyukronBelum ada peringkat
- Inkubator Telur IoT Otomatis - Hackster - IoDokumen8 halamanInkubator Telur IoT Otomatis - Hackster - IoMuhamad SyukronBelum ada peringkat
- Panduan ATA-Wheel EduBot FREE PDFDokumen86 halamanPanduan ATA-Wheel EduBot FREE PDFNabil HardiansaBelum ada peringkat
- Kanthal (Alloy) - WikipediaDokumen2 halamanKanthal (Alloy) - WikipediaMuhamad SyukronBelum ada peringkat
- The Baby Warmer (Pendekatan Inkubator Neonatus) - Arduino Project HubDokumen21 halamanThe Baby Warmer (Pendekatan Inkubator Neonatus) - Arduino Project HubMuhamad SyukronBelum ada peringkat
- Semua Tentang Multimaster Control Panel - Pengembang - CavyIoTDokumen16 halamanSemua Tentang Multimaster Control Panel - Pengembang - CavyIoTMuhamad SyukronBelum ada peringkat
- BloggerDokumen3 halamanBloggerMuhamad SyukronBelum ada peringkat
- ESP32 RFID - Printing The MFRC522 Firmware Version - TechtutorialsxDokumen14 halamanESP32 RFID - Printing The MFRC522 Firmware Version - TechtutorialsxMuhamad SyukronBelum ada peringkat
- ESP32 Arduino HTTP Server - External and Internal Redirects - TechtutorialsxDokumen13 halamanESP32 Arduino HTTP Server - External and Internal Redirects - TechtutorialsxMuhamad SyukronBelum ada peringkat
- Elektronik Rumah - Mengirim Data Dari ESP32 - ESP8266 Ke Google SpreadsheetDokumen10 halamanElektronik Rumah - Mengirim Data Dari ESP32 - ESP8266 Ke Google SpreadsheetMuhamad Syukron100% (1)
- Cara Menambahkan Source Code Di Blogger Menggunakan Github - Berbagi IlmuDokumen5 halamanCara Menambahkan Source Code Di Blogger Menggunakan Github - Berbagi IlmuMuhamad SyukronBelum ada peringkat