Anda mungkin juga menyukai
- Naval Shiphandling Capitulo 2Dokumen27 halamanNaval Shiphandling Capitulo 2Felipe IlhaBelum ada peringkat
- Optimasi Respon Gerakan Kapal Ikan Catamaran Terhafdap Gelombang Reguller RomadhoniDokumen11 halamanOptimasi Respon Gerakan Kapal Ikan Catamaran Terhafdap Gelombang Reguller RomadhoniAnkiq MaqapagalBelum ada peringkat
- 186 Tello Ruiz ManasesDokumen16 halaman186 Tello Ruiz ManasesFrederik CañabiBelum ada peringkat
- 01 Resonance-Free SWATHDokumen10 halaman01 Resonance-Free SWATHIvan NilsenBelum ada peringkat
- #On The Intact Stability of A Ship in Head and Following Sea An Analysis of The Dynamic Roll Angle Due To Sudden Heeling MomentsDokumen13 halaman#On The Intact Stability of A Ship in Head and Following Sea An Analysis of The Dynamic Roll Angle Due To Sudden Heeling MomentsHigor Pereira de OliveiraBelum ada peringkat
- Dynamical Models of Extreme Rolling of Vessels in Head WavesDokumen27 halamanDynamical Models of Extreme Rolling of Vessels in Head WavesOscar Sacases PlanasBelum ada peringkat
- Module 3-Strength-Of-Ships-Part2Dokumen16 halamanModule 3-Strength-Of-Ships-Part2arjungireesh789Belum ada peringkat
- Studi Hull Form Kapal Barang-Penumpang Tradisional Di Danau Toba Sumatera UtaraDokumen9 halamanStudi Hull Form Kapal Barang-Penumpang Tradisional Di Danau Toba Sumatera UtaraaldandanalBelum ada peringkat
- PIANC Bulletin116aDokumen12 halamanPIANC Bulletin116aIgnatius SamrajBelum ada peringkat
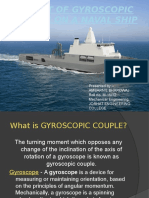
- Gyroscope - Gyroscopic Effects On The Movement Of: Airplanes and Ships - Gyroscope StabilizationDokumen25 halamanGyroscope - Gyroscopic Effects On The Movement Of: Airplanes and Ships - Gyroscope StabilizationAbdur Rahman100% (1)
- Module 002 STABILITY & DRAFTMARKS READINGDokumen99 halamanModule 002 STABILITY & DRAFTMARKS READINGallan kasem alcazaren100% (1)
- Pivot PointDokumen31 halamanPivot PointJorge Quintas100% (2)
- Lifeboat StationDokumen6 halamanLifeboat StationJerome EncinaresBelum ada peringkat
- Fluid Tank & Ship MotionDokumen30 halamanFluid Tank & Ship Motionsalman GtrBelum ada peringkat
- Fluid Tank & Ship MotionDokumen30 halamanFluid Tank & Ship Motionsalman GtrBelum ada peringkat
- Word Ship HandlingDokumen9 halamanWord Ship Handlingrigel100% (1)
- Paper - B - Inggris Group 2Dokumen11 halamanPaper - B - Inggris Group 2Alip FadilahhBelum ada peringkat
- Ship StressesDokumen7 halamanShip StressesSumit Sinha50% (2)
- New Strip Theory Approach To Ship Motions PredictionDokumen8 halamanNew Strip Theory Approach To Ship Motions Predictionmichael AnyanwuBelum ada peringkat
- Stab 2000Dokumen14 halamanStab 2000KalBelum ada peringkat
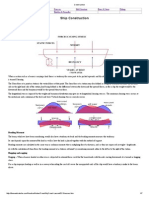
- Ship ConstructionDokumen7 halamanShip Constructionpramodkb_cusatBelum ada peringkat
- Catamaran Wave Piercing Bow 1Dokumen9 halamanCatamaran Wave Piercing Bow 1Akbari KarimBelum ada peringkat
- IntroductionDokumen6 halamanIntroductionAurelio DutariBelum ada peringkat
- Analisa Pengaruh Penambahan Fin Stabilizer Terhadap Gerakan Rolling Dan Motion Sickness Incidence (Msi) Pada Km. Sabuk Nusantara 71Dokumen5 halamanAnalisa Pengaruh Penambahan Fin Stabilizer Terhadap Gerakan Rolling Dan Motion Sickness Incidence (Msi) Pada Km. Sabuk Nusantara 71Ahmad MuhajirBelum ada peringkat
- SP2Dokumen15 halamanSP2Deepak PooranachandranBelum ada peringkat
- Seamanship 2A ReviewerDokumen8 halamanSeamanship 2A Reviewergemmarvillacastin712Belum ada peringkat
- Roll Stabilization by Anti-Roll Passive PDFDokumen13 halamanRoll Stabilization by Anti-Roll Passive PDFDgf CmaBelum ada peringkat
- ID Studi Hull Form Kapal Barang Penumpang TDokumen9 halamanID Studi Hull Form Kapal Barang Penumpang TJunaidin SoroBelum ada peringkat
- Sea KeepingDokumen4 halamanSea KeepingLuis ClaudeBelum ada peringkat
- Passing Ship FloryDokumen12 halamanPassing Ship FloryPeyman MznBelum ada peringkat
- SeakeepingDokumen28 halamanSeakeepingMini DangBelum ada peringkat
- Pivot PointDokumen3 halamanPivot PointHarikrishnaBelum ada peringkat
- K878 Levadou 2003 Parametric RollDokumen14 halamanK878 Levadou 2003 Parametric Rollباسل ديوبBelum ada peringkat
- On The Subject of High Speed Monohulls PDokumen44 halamanOn The Subject of High Speed Monohulls PFederico BabichBelum ada peringkat
- Resistance, Propulsion and Manoeuvrability: Fishing Vessel Technology 20Th Graduate School Module 1.-Ship DesignDokumen27 halamanResistance, Propulsion and Manoeuvrability: Fishing Vessel Technology 20Th Graduate School Module 1.-Ship DesignJuan SilvaBelum ada peringkat
- Transverse Thrust On The PropellerDokumen12 halamanTransverse Thrust On The PropellerNuman Kooliyat IsmethBelum ada peringkat
- Naval Shiphandling - Cap2 PDFDokumen27 halamanNaval Shiphandling - Cap2 PDFCleyton LeiteBelum ada peringkat
- Ship's Movements at SeaDokumen3 halamanShip's Movements at SeaRahul Mukund ManoharBelum ada peringkat
- Ship DynamicsDokumen18 halamanShip DynamicsSallaVenkata Uma Maheswara RaoBelum ada peringkat
- The Drift Force and Moment On Ships in WavesDokumen10 halamanThe Drift Force and Moment On Ships in WavesvictorBelum ada peringkat
- Mae 406 Lecture Note IDokumen37 halamanMae 406 Lecture Note IitzyungolazyBelum ada peringkat
- Pivot PointDokumen26 halamanPivot PointJet RocetBelum ada peringkat
- Forefoot Design For Planing HullsDokumen17 halamanForefoot Design For Planing Hullsadslfasdf100% (1)
- Pivot PointDokumen22 halamanPivot Pointjanderclanderpeich100% (1)
- Department of Defence: Science and Technology Organisation Materials Research LaboratoryDokumen33 halamanDepartment of Defence: Science and Technology Organisation Materials Research Laboratoryrisiana_limuriaBelum ada peringkat
- Unit 12Dokumen8 halamanUnit 12Vikash Kumar BhartiyaBelum ada peringkat
- ZN 13 KornackiDokumen5 halamanZN 13 KornackiMarkoNovaselićBelum ada peringkat
- College of Maritime Education: Compre - DeckDokumen33 halamanCollege of Maritime Education: Compre - DeckCyrus TaclobBelum ada peringkat
- Green Sea Loads On General Cargo ShipDokumen14 halamanGreen Sea Loads On General Cargo ShipivkenavarchBelum ada peringkat
- Savitsky - On The Subject of High Speed MonohullsDokumen44 halamanSavitsky - On The Subject of High Speed MonohullssearchileBelum ada peringkat
- Ship Hull ManualDokumen31 halamanShip Hull ManualRajeev Balakrishnan100% (1)
- Ship SquatDokumen5 halamanShip SquatVisveswaran InbasekaranBelum ada peringkat
- Effect of Gyroscopic Couple On A NAVAL SHIPDokumen16 halamanEffect of Gyroscopic Couple On A NAVAL SHIPdada100% (1)
- The Measurement of Weight Distribution of Olympic Class Dinghies and KeelboatsDokumen32 halamanThe Measurement of Weight Distribution of Olympic Class Dinghies and KeelboatsPeter HinrichsenBelum ada peringkat
- Engleza MaritimaDokumen45 halamanEngleza MaritimaSebastian BradulescuBelum ada peringkat
- Unesco - Eolss Sample Chapters: Theory, Analysis, and Design Methodology For Ship ManeuverabilityDokumen12 halamanUnesco - Eolss Sample Chapters: Theory, Analysis, and Design Methodology For Ship Maneuverabilityconmec.crplBelum ada peringkat
- Evaluasi Aspek Gerakan Dan Operabilitas Dalam Perancangan: Drillship Dengan Displasemen 35.000 TonDokumen9 halamanEvaluasi Aspek Gerakan Dan Operabilitas Dalam Perancangan: Drillship Dengan Displasemen 35.000 TonebdjatmikoBelum ada peringkat
- 2112030065-Non DegreeDokumen104 halaman2112030065-Non DegreeNoveta FernaldinatanBelum ada peringkat
- 05.2018.1.01183 - Chandra Dwi Setia - Manajemen Produksi Dan OperasiDokumen4 halaman05.2018.1.01183 - Chandra Dwi Setia - Manajemen Produksi Dan OperasiNoveta FernaldinatanBelum ada peringkat
- 05.2020.1.90390 - Noveta Fernaldinatan - Korosi Dan Pengangannya (Tugas Review)Dokumen4 halaman05.2020.1.90390 - Noveta Fernaldinatan - Korosi Dan Pengangannya (Tugas Review)Noveta FernaldinatanBelum ada peringkat
- 312 1309 1 PBDokumen18 halaman312 1309 1 PBNoveta FernaldinatanBelum ada peringkat
- Berita Acara Ut Valvata 1Dokumen1 halamanBerita Acara Ut Valvata 1Noveta FernaldinatanBelum ada peringkat
- Template Hasil Pengukuran Bersama KMP Pancar Indah NDTDokumen2 halamanTemplate Hasil Pengukuran Bersama KMP Pancar Indah NDTNoveta FernaldinatanBelum ada peringkat