Dasoto Bank
Diunggah oleh
Yoga PratamaHak Cipta
Format Tersedia
Bagikan dokumen Ini
Apakah menurut Anda dokumen ini bermanfaat?
Apakah konten ini tidak pantas?
Laporkan Dokumen IniHak Cipta:
Format Tersedia
Dasoto Bank
Diunggah oleh
Yoga PratamaHak Cipta:
Format Tersedia
BANK SOAL
DASAR OTOMATISASI
2006
iv
DAFTAR ISI
Halaman
Bio Data Singkat Penulis ....
Kata Pengantar
iii
Daftar Isi
iv
Pemodelan Blok Diagram Sistem .............
Analisa Sistem Fisik Menggunakan Persamaan Diferensial ....................
Analisa Sistem Fisik Menggunakan Fungsi Transfer ....................
28
Representasi Sistem Pada Blok Diagram ...............
49
Represenstasi Sistem Pada Signal Flow Graph (Grafik Aliran Sinyal) .............
60
Analisa Sistem Pengaturan Melalui 3 (tiga) Metode Pemodelan .......................
72
Daftar Pustaka v
BANK SOAL DASAR OTOMATISASI
PEMODELAN BLOK DIAGRAM SISTEM
Contoh 1. Sistem Kemudi Mobil
a.
Jenis Sistem Pengaturan Umpan Balik.
b.
Parameter-parameter Sistem
1)
Input adalah Arah yang Diinginkan.
2)
Output adalah Arah Sebenarnya.
3)
Lintasan Maju adalah Pengemudi Mekanisme Pengemudian Mobil.
4)
Lintasan Balik adalah Pengemudi Mekanisme Pengemudian Sensor
Kemudi Roda dan Pengemudi Mekanisme Pengemudian Mobil Pengukuran
Visual.
Bank Soal Dasar Otomatisasi 2006
Copyright @ Mayor Lek Arwin D.W. Sumari, S.T.
c.
Blok Diagram Ekivalen ada 2 (dua) alternatif :
d.
Fungsi Transfer-nya adalah (ssi urutan gambar di atas)
TF ( s ) =
C (s )
R (s)
G 1G 2G 3
1+G 1G 2 H 2 +G 1G 2G 3 H1
G 1G 2G 3
1+G 1G 2 H1 +G 1G 2G 3 H 2
atau
TF ( s ) =
C (s )
R (s)
Bank Soal Dasar Otomatisasi 2006
Copyright @ Mayor Lek Arwin D.W. Sumari, S.T.
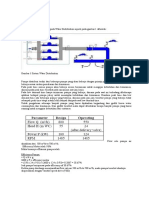
Contoh 2. Sistem Boiler-Generator untuk Pembangkit Daya Listrik
Actual
Generation
Computer
Desired temperature
Pressure, O2
a.
Input adalah :
1)
Desired temperature generation, R1 ( s ) .
2)
Desired O2 generation, R2 ( s ) .
3)
Desired pressure generation, R3 ( s ) .
b.
Proses adalah Boiling pada Boiler, G ( s ) .
c.
Output adalah Actual generation (electricity), C ( s ) .
d.
Feedback adalah :
1)
Measured temperature generation, H1 ( s ) .
2)
Measured O2 generation, H 2 ( s ) .
3)
Measured pressure generation, H 3 ( s ) .
Bank Soal Dasar Otomatisasi 2006
Copyright @ Mayor Lek Arwin D.W. Sumari, S.T.
e.
Disturbances diabaikan.
Model Blok Diagram Sistem Boiler-Generator di atas adalah :
Bank Soal Dasar Otomatisasi 2006
Copyright @ Mayor Lek Arwin D.W. Sumari, S.T.
ANALISA SISTEM FISIK MENGGUNAKAN PERSAMAAN DIFERENSIAL
Contoh 1. Rangkaian Seri R dan C
Asumsi :
v ( t ) = 10 volt
i ( t ) dt
s = 0
0
R =1
C =1
PD untuk sistem di atas adalah :
v (t) = i (t) R +
i (t) R +
1
i ( t ) dt
C
1
i ( t ) dt = 10
C
I ( s) =
sC
10
.
s sRC + 1
I ( s) R +
0
i ( t ) dt 10
1 I ( s )
+
C s
s s
I ( s ) 10
=
sC
s
1
10
I ( s) R +
=
sC
s
I ( s) R +
I ( s) =
10C
sRC + 1
I ( s) =
10
s +1
10
R
1
s+
RC
sRC + 1
sC
maka i ( t ) = 10e t , pole adalah s = 1
Bank Soal Dasar Otomatisasi 2006
Copyright @ Mayor Lek Arwin D.W. Sumari, S.T.
Iterasi ke1
2
3
4
5
6
7
8
9
10
11
t
0
1
2
3
4
5
6
7
8
9
10
v(t)
10
1.35335283
0.18315639
0.02478752
0.00335463
0.000454
0.00006144
0.00000832
0.00000113
0.00000015
0.00000002
Bentuk Grafik i ( t ) vs t rangkaian RC seri di atas adalah sebagai berikut :
v(t)
i(t) vs t
1.4
1.2
1
0.8
0.6
0.4
0.2
0
1
10
11
Bentuk Grafik zero dan pole rangkaian RC seri di atas adalah sebagai berikut :
Bank Soal Dasar Otomatisasi 2006
Copyright @ Mayor Lek Arwin D.W. Sumari, S.T.
Contoh 2. Rangkaian Paralel L dan C
Asumsi :
i (t ) = 0 A
1
= 4
LC
( )
v 0+ = v0 = 1 volt
v ( t ) dt
s =0
PD untuk sistem di atas adalah :
i (t ) = C
C
dv ( t )
dt
dv ( t )
dt
V ( s) =
1
v ( t ) dt
L
1
+ v ( t ) dt = 0
L
k1 =
V s
v t dt
( )} + L1 (s ) + ( s) = 0
0
C { sV ( s ) v0 } +
V ( s)
sL
=0
V ( s ) sC + = Cv0
sL
2
s LC + 1
V ( s)
= Cv0
sL
sL
V ( s ) = Cv0 . 2
s LC + 1
s
s
V ( s) = 2
=
s 4 ( s 2 )( s + 2 )
( s s1 ) s
( s + 2 )( s 2 ) s =2
1
C sV ( s ) v 0+
k1
k
+ 2
s+2 s2
( s + 2 ) . ( 2 )
( s + 2 )( 2 2 )
2
4
1
=
2
=
k2 =
( s s2 ) s
( s + 2 )( s 2 ) s =2
1
( s 2) .( 2)
( 2 + 2 )( s 2 )
2
4
1
=
2
=
Dari persamaan di atas diperoleh zero, s = 0 dan pole, s1 = 2,
s2 = 2
Bank Soal Dasar Otomatisasi 2006
Copyright @ Mayor Lek Arwin D.W. Sumari, S.T.
Selanjutnya akan diperoleh :
1
1
V ( s) = 2 + 2
s+2 s2
v (t ) =
1 2 t 1 2 t
e + e
2
2
Iterasi ke1
2
3
4
5
6
7
8
9
10
t
0
1
2
3
4
5
6
7
8
9
v(t)
1
3.76219569
27.30823282
201.7156359
1490.479159
11013.2329
81377.39555
601302.1407
4443055.248
32829984.47
Bentuk Grafik i ( t ) vs t rangkaian LC paralel di atas adalah sebagai berikut :
i(t) vs t
300000000
250000000
v(t)
200000000
150000000
100000000
50000000
0
1
10 11
Bank Soal Dasar Otomatisasi 2006
Copyright @ Mayor Lek Arwin D.W. Sumari, S.T.
Bentuk Grafik zero dan pole rangkaian LC paralel di atas adalah sebagai berikut :
Bank Soal Dasar Otomatisasi 2006
Copyright @ Mayor Lek Arwin D.W. Sumari, S.T.
10
Contoh 3. Rangkaian Seri L dan C
Asumsi :
v ( t ) = 5 volt
( )=i
i 0
L =1
1
= 4
LC
=1 A
i ( t ) dt
=0
s
PD untuk sistem di atas adalah :
di ( t ) 1
+ i ( t ) dt
dt
C
di ( t ) 1
L
+ i ( t ) dt = 5
dt
C
v (t) = L
( )}
L sI ( s ) i 0+
1
C
I ( s) =
I ( s ) 0 i ( t ) dt 5
+
=
s s
k1 =
=
I ( s) =
2
4
1
=
2
k2 =
( s s2 ) s
( s + 2 )( s 2 ) s =2
1
5
s+
L
1
2
s +
LC
i (t ) =
( s 2) .( 2)
( 2 + 2 )( s 2 )
2
4
1
=
2
=
s+5
s2 4
1
1
maka I ( s ) = 2 + 2
s+2 s2
( s + 2 ) . ( 2 )
( s + 2 )( 2 2 )
s 2 LC + 1 5 + sL
I ( s)
=
sL
sLC
C
I ( s ) = 5 + sL. 2
s LC + 1
( s s1 ) s
( s + 2 )( s 2 ) s =2
1
1 5
I ( s ) sL +
= + Li0
sC s
1 5
I ( s) s +
+1
=
sLC sL
C ( sL + 5 )
I ( s) = 2
s LC + 1
k1
k
+ 2
s+2 s2
1 2 t 1 2 t
e + e ,
2
2
zero adalah s = 5 dan pole adalah s1 = 2;
s2 = 2
Bank Soal Dasar Otomatisasi 2006
Copyright @ Mayor Lek Arwin D.W. Sumari, S.T.
11
Iterasi ke1
2
3
4
5
6
7
8
9
10
t
0
1
2
3
4
5
6
7
8
9
i(t)
1
3.76219569
27.30823282
201.7156359
1490.479159
11013.2329
81377.39555
601302.1407
4443055.248
32829984.47
Bentuk Grafik i ( t ) vs t rangkaian LC seri di atas adalah sebagai berikut :
i(t) vs t
300000000
250000000
i(t)
200000000
150000000
100000000
50000000
0
1
10 11
Bentuk Grafik zero dan pole rangkaian LC seri di atas adalah sebagai berikut :
Bank Soal Dasar Otomatisasi 2006
Copyright @ Mayor Lek Arwin D.W. Sumari, S.T.
12
Contoh 4. Rangkaian Paralel R dan C
Asumsi :
i (t ) = 2 A
( )
v 0+ = v0 = 1 volt
R = C =1
v ( t ) dt
s =0
PD untuk sistem di atas adalah :
i (t ) =
v (t )
+C
dv ( t )
V ( s ) + sC = Cv0
R
sRC + 1
V ( s)
= Cv0
R
RCv0
v0
V ( s) =
sRC + 1
s + 1 / RC
1
V ( s) =
s +1
R
dt
v (t )
dv ( t )
+C
=2
R
dt
V ( s)
R
V ( s)
R
( )} = 0
+ C sV ( s ) v 0+
+ sCV ( s ) Cv0 = 0
maka V ( s ) =
1
v ( t ) = e t dan pole adalah s = 1 , tanpa zero.
s +1
Iterasi ke1
2
3
4
5
6
7
8
9
10
11
t
0
1
2
3
4
5
6
7
8
9
10
i(t)
1
0.36787944
0.13533528
0.04978707
0.01831564
0.00673795
0.00247875
0.00091188
0.00033546
0.00012341
0.0000454
Bank Soal Dasar Otomatisasi 2006
Copyright @ Mayor Lek Arwin D.W. Sumari, S.T.
13
Bentuk Grafik v ( t ) vs t rangkaian RC paralel di atas adalah sebagai berikut :
v(t) vs t
1.2
1
v(t)
0.8
0.6
0.4
0.2
0
1
10
11
Bentuk Grafik zero dan pole rangkaian RC paralel di atas adalah sebagai berikut :
Bank Soal Dasar Otomatisasi 2006
Copyright @ Mayor Lek Arwin D.W. Sumari, S.T.
14
Contoh 5. Rangkaian Seri R, L dan C
Analisa KVL
Vtotal = V R + V L + VC
I
C
di (t ) 1
= R.i (t ) + L.
+ i (t ) dt
dt
C
= I .R + I .L +
v (t )
(1)
Tentukan Persamaan Diferensial Orde 2 dari (1)
dv (t )
di (t )
d 2 i (t ) i (t )
= R.
+ L.
+
dt
dt
C
dt 2
2
d i (t )
di (t ) i (t )
= L.
+ R.
+
2
dt
C
dt
Tranformasikan ke bentuk Laplace.
(2)
Untuk Persamaan Diferensial Homogen disyaratkan
v (t ) = 0 , maka :
( )
di 0 +
I ( s)
+
=0
L s 2 I ( s ) si 0 +
+ R sI (s ) i 0 +
dt
C
di (0 + )
I ( s)
+ RsI ( s ) Ri (0 + ) +
=0
Ls 2 I ( s ) Lsi (0 + ) L
C
dt
1
di (0 + )
=0
I ( s ) Ls 2 + Rs + i (0 + )[Ls + R] L
C
dt
( )
Bila i (0 + ) = i 0 dan
di (0 + )
dt
( )}
= 0 maka :
t =0
Bank Soal Dasar Otomatisasi 2006
Copyright @ Mayor Lek Arwin D.W. Sumari, S.T.
15
I ( s ) Ls 2 + Rs + i 0 [Ls + R] 0 = 0
C
I ( s ) Ls 2 + Rs + = i 0 [Ls + R]
C
dan
I ( s) =
i 0 [Ls + R ]
p(s ) zero
Ls + R
=
=
=
.
1 q (s ) pole
1
Ls 2 + Rs +
Ls 2 + Rs +
C
C
Bila R = 3, L = 1, C =
(3)
1
, i0 = 0 V , maka zero dan pole Rangkaian RLC di atas adalah
2
sebagai berikut :
Substitusi besar R, L dan C dengan angka di atas sehingga (3) menjadi :
I ( s) =
s+3
1
(1) s 2 + ( 3) s + 1
2
s+3
s+3
=
s + 3s + 2 ( s + 2 )( s + 1)
2
zero s = 3 dan pole s1 = 2, s 2 = 1
Bentuk Grafik zero dan pole rangkaian RLC seri di atas adalah sebagai berikut :
Bank Soal Dasar Otomatisasi 2006
Copyright @ Mayor Lek Arwin D.W. Sumari, S.T.
16
Aplikasikan Pecahan Parsial untuk mendapatkan nilai residu k1 dan k 2 sebagai berikut :
I (s ) =
k1 =
k1
k2
+
(s + 2) (s + 1)
..
(s s1 ) p( s)
q( s)
k2 =
s1 = 2
(s + 2)(s + 3)
(s + 2)( s + 1)
(s + 3) = ( 2 + 3) = 1 = 1
=
(s + 1) s =2 ( 2 + 1) 1
(4)
(s s 2 ) p( s )
q( s)
s 2 = 1
(s + 1)(s + 3)
(s + 2)( s + 1)
( 1 + 3) = 2 = 2
( s + 3)
=
(s + 2) s =1 ( 1 + 2) 1
Persamaan i (t ) diperoleh dengan melakukan Inverse Transformasi Laplace (4) sebagai
berikut :
i (t ) =
+
s + 2
maka persamaan i (t ) adalah :
s + 1
i (t ) = e 2 t + 2e t
t
- e 2 t
-1
-0,135
-0,018
-0,0025
4
3,35.10-
e t
0,736
0,271
0,099
0,0366
0,0134
i (t )
0,6
0,253
0,097
0,0363
0,0134
5
-4,5.10
6
6,14.106
4,95.103
4,95.103
Bank Soal Dasar Otomatisasi 2006
Copyright @ Mayor Lek Arwin D.W. Sumari, S.T.
17
Bentuk Grafik i (t ) vs t rangkaian RLC di atas adalah sebagai berikut :
i(t) vs t
i(t)
1.5
1
i(t)
0.5
0
1
Bank Soal Dasar Otomatisasi 2006
Copyright @ Mayor Lek Arwin D.W. Sumari, S.T.
18
Contoh 6. Rangkaian Paralel RLC
v (t )
R
+C
dv ( t )
dt
1 t
v ( t ) dt = r ( t )
L 0
1.
Cari zero-pole dan buat petanya pada bidang-s.
2.
Gambarkan grafik respon sistem terhadap waktu.
Tahapan
1.
v (t )
Ubah persamaan integro-diferensial di atas ke bentuk Laplace. Asumsi r ( t ) = 0
dv ( t )
1 t
v ( t ) dt = 0
R
dt
L 0
0
f dt
V ( s)
1 V ( s )
+ C sV ( s ) v 0+ +
+
=0
R
L s
s
+C
( )}
( )=v ;
Asumsi : v 0
f dt
= 0 , maka persamaan di atas menjadi :
Bank Soal Dasar Otomatisasi 2006
Copyright @ Mayor Lek Arwin D.W. Sumari, S.T.
19
V ( s)
R
V ( s)
R
+ C { sV ( s ) v0 } +
+ sCV ( s ) Cv0 +
V ( s)
sL
V ( s)
sL
=0
=0
1 1
V ( s ) sC + + = Cv0 eliminasi s
R sL
s 1
V ( s ) s 2C + + = sCv0 eliminasi C
R L
s
1
V ( s ) s2 +
+
= sv0
RC LC
Asumsi :
V ( s) =
V ( s) =
p ( s ) zero
sv0
=
=
s
1
q
s
pole
2
(
)
s +
+
RC LC
1
1
= 5;
= 6; v0 = 1 V , maka akan diperoleh persamaan sebagai berikut :
RC
LC
s
s
maka zero adalah s = 0 dan pole adalah
=
s + 5 s + 6 ( s + 2 )( s + 3 )
2
s1 = 2; s2 = 3
Peta pole-zero pada bidang-s
Bank Soal Dasar Otomatisasi 2006
Copyright @ Mayor Lek Arwin D.W. Sumari, S.T.
20
2.
Mencari persamaan respon waktu sistem.
Inverskan Transformasi Laplace di atas
kembali ke kawasan waktu menggunakan metode Pecahan-Bagian (residu).
V ( s) =
k1 =
k1
k2
+
( s + 2) ( s + 3)
( s s1 ) p ( s )
q ( s)
s=s
k2 =
( s + 2) s
( s + 2 )( s + 3) s =2
2
2 + 3
= 2
( s s2 ) p ( s )
q ( s)
s=s
( s + 3) s
( s + 2 )( s + 3) s =3
3
3 + 2
=3
Maka :
2
3
+
( s + 2) ( s + 3)
v ( t ) = 3e 3 t 2e 2 t
v(t) vs t
1.2
1
0.8
0.6
v(t)
V ( s) =
0.4
0.2
0
-0.2
10
11
-0.4
t
Bank Soal Dasar Otomatisasi 2006
Copyright @ Mayor Lek Arwin D.W. Sumari, S.T.
21
Contoh 7. Rangkaian Seri dengan 2R dan C
Analisa KVL
V1 = VR1 + VR 2 + VC
= I .R1 + I .R2 +
1
i dt
C
I ( s)
Cs
1
= I ( s ) R1 + R2 +
Cs
R Cs + R2Cs + 1
= I ( s) 1
Cs
V2 = VC =
1
i dt
C
V1 ( s ) = I ( s ) R1 + I ( s ) R2 +
V2 ( s ) =
I ( s)
I ( s ) = CsV2 ( s )
Cs
Lakukan substitusi I ( s ) menjadi
R Cs + R2Cs + 1
V1 ( s ) = I ( s ) 1
Cs
V2 ( s )
1
R Cs + R2Cs + 1
= CsV2 ( s ) 1
atau
=
maka
Cs
V1 ( s ) ( R1Cs + R2Cs + 1)
= V2 ( s ) ( R1Cs + R2Cs + 1)
V2 ( s )
1
=
V1 ( s ) s ( R1C + R2C ) + 1
1
R1C + R2C
=
1
s+
R1C + R2C
Bank Soal Dasar Otomatisasi 2006
Copyright @ Mayor Lek Arwin D.W. Sumari, S.T.
22
Dari Fungsi Transfer di atas dapat disimpulkan bahwa rangkaian RC seri di atas tidak
mempunyai zero dan hanya mempunyai single dominant pole, s =
1
.
R1C + R2C
Analisa secara Transformasi Laplace
Misal : RS = R1 + R2
1
i dt
C
dV1
di i
= RS +
dt
dt C
V1 = IRS +
( )} + IC( s) = 0
RS sI ( s ) i 0+
( )
RS sI ( s ) RS i 0+ +
dV1
I ( s)
= 0 dengan asumsi
C
dt
( )
= 0 dan i 0+ = i0 maka
t =0
I ( s ) RS s + = RS i 0+
C
( )
I ( s) =
RS i0
1
RS s +
C
RS
1
RS s +
C
R1 + R2
1
s ( R1 + R2 ) +
C
sehingga hanya ada single dominant pole, s =
zero
atau
pole
s+
1
1
C ( R1 + R2 )
1
.
R1C + R1C
Dari hasil di atas tampak bahwa hasil Analisa Fungsi Transfer dan Transformasi Laplace
diperoleh hasil yang sama untuk Rangkaian Seri 2 R dan C yakni single dominant pole,
s=
1
pada bidang-s.
R1C + R1C
Bank Soal Dasar Otomatisasi 2006
Copyright @ Mayor Lek Arwin D.W. Sumari, S.T.
23
Dengan demikian i ( t ) diperoleh dari Invers Transformasi Laplace I ( s ) sebagai berikut :
i (t ) =
=e
1
1
1
s +
RC1 + RC 2
1
Bila diasumsikan a =
maka i ( t ) = e at
RC1 + RC 2
t
RC1 + RC 2
Dengan demikian bentuk time response-nya adalah :
t
a
e at
i (t )
0
0
1
1
0.36788
2
0.13534
1
3
0.04979
4
0.01832
5
0.00674
0.36788
0.13534
0.04979
0.01832
0.00674
Bank Soal Dasar Otomatisasi 2006
Copyright @ Mayor Lek Arwin D.W. Sumari, S.T.
24
i(t) vs t
1.2
1
i(t)
0.8
0.6
i(t)
0.4
0.2
0
t
t
Bank Soal Dasar Otomatisasi 2006
Copyright @ Mayor Lek Arwin D.W. Sumari, S.T.
25
Contoh 8. Rangkaian Seri dengan 2C dan R
Analisa KVL
V1 = VC 1 + VC 2 + VR
=
1
1
i dt +
i dt +I .R
C1
C2
I ( s) I ( s)
+
+ I ( s) R
V1 ( s ) =
C1 s C 2 s
1
1
= I ( s)
+
+ R
C1 s C 2 s
C s + C 2 s + RC1 sC 2 s
= I ( s) 1
C1 sC 2 s
V2 = VR = IR
V2 ( s ) = I ( s ) R I ( s ) =
V2 ( s )
R
Lakukan substitusi I ( s ) menjadi
V1 ( s ) =
V2 ( s ) 1
1
+
+ R
R C1 s C 2 s
= V2 ( s )
1 C 2 s + C1 s
+ R
R C1 sC 2 s
= V2 ( s )
1 C 2 s + C1 s + RC1 sC 2 s
maka
R
C1 sC 2 s
C s + C1 s + RC1 sC 2 s
= V2 ( s ) 2
RC1 sC 2 s
C + C1 + RsC1C 2
= V2 ( s ) 2
RsC1C 2
V2 ( s )
RsC1C 2
=
V1 ( s ) C 2 + C1 + RsC1C 2
sRC1C 2
1
=
sRC1C 2 + C1 + C 2 RC1C 2
s
=
C1 + C 2
s+
RC1C 2
Bank Soal Dasar Otomatisasi 2006
Copyright @ Mayor Lek Arwin D.W. Sumari, S.T.
26
Bila =
C1 + C 2
V ( s)
s
maka 2
=
V1 ( s ) s +
RC1C 2
Analisa Transformasi Laplace
V1 =
1
1
i dt +
i dt + IR
C1
C2
dV1
i
i
di
=
+
+R
dt
C1 C 2
dt
( )} = 0
I ( s) I ( s)
+
+ R sI ( s ) i 0+
C1
C2
dV1
I ( s) I ( s)
+
+ RsI ( s ) Ri 0+ = 0 dengan asumsi
C1
C2
dt
( )
( )
= 0 dan i 0+ = i0 maka
t =0
1
+ Rs = Ri 0+
I ( s) +
C1 C 2
( )
R
R
I ( s) =
=
C + C1
1
1
1
1
+
+ Rs Rs + 2
+ Rs
+
C1 C 2
C1C 2
C1 C 2
1
zero
=
C + C1
pole
s+ 2
RC1C 2
Ri0
sehingga hanya ada single dominant pole, s =
C1 + C 2
.
RC1C 2
Dari hasil di atas tampak bahwa hasil Analisa Fungsi Transfer dan Transformasi Laplace
diperoleh hasil yang sama untuk Rangkaian RC Seri (dua C dan satu R) yakni single
dominant pole, s =
C1 + C 2
pada bidang-s.
RC1C 2
Bank Soal Dasar Otomatisasi 2006
Copyright @ Mayor Lek Arwin D.W. Sumari, S.T.
27
i (t ) =
=e
1
1
s + C1 + C 2 Bila diasumsikan a = C1 + C 2 maka i ( t ) = e at
RC1C 2
RC1C 2
C +C 2
1
t
RC1C 2
Dengan demikian bentuk time response-nya adalah :
t
a
e at
i (t )
0
0
1
1
0.36788
2
0.13534
1
3
0.04979
4
0.01832
5
0.00674
0.36788
0.13534
0.04979
0.01832
0.00674
i(t) vs t
1.2
1
i(t)
0.8
0.6
i(t)
0.4
0.2
0
t
t
Bank Soal Dasar Otomatisasi 2006
Copyright @ Mayor Lek Arwin D.W. Sumari, S.T.
28
ANALISA SISTEM FISIK MENGGUNAKAN FUNGSI TRANSFER
Contoh 1. Rangkaian Paralel C diseri dengan R
Fungsi Transfer adalah perbandingan antara
output dan input suatu sistem.
FT
voutput
vinput
V2
VI
Analisa KCL
I = I C2 + I C 1 = I R
C1
d (V1 V2 )
d (V1 V2 ) V2
+ C2
=
dt
dt
R
V2 ( s )
R
V ( s)
C1 sV1 ( s ) C 2 sV2 ( s ) + C 2 sV1 ( s ) C 2 sV2 ( s ) = 2
R
1
V1 ( s ) ( C1 s + C 2 s ) = V2 ( s ) C1 s + C 2 s +
R
C1 s (V1 ( s ) V2 ( s ) ) + C 2 s (V1 ( s ) V2 ( s ) ) =
s (C1 + C 2 )
V2 ( s )
C1 s + C 2 s
1
=
=
1
1
V1 ( s ) C s + C s +
s (C1 + C 2 ) + C1 + C 2
1
2
R
R
s
=
1
s+
R(C1 + C 2 )
Bila =
V ( s)
s
1
maka 2
=
V1 ( s ) s +
R(C1 + C 2 )
Bank Soal Dasar Otomatisasi 2006
Copyright @ Mayor Lek Arwin D.W. Sumari, S.T.
29
Contoh 2. Rangkaian Paralel RC diseri dengan C
Fungsi Transfer adalah perbandingan antara
output dan input suatu sistem.
FT
voutput
vinput
V2
VI
Analisa KCL
I = I R + I C1 = I C2
d (V1 V2 )
d (V2 )
(V1 V2 )
+ C1
= C2
R
dt
dt
V1 ( s ) V2 ( s )
+ C1 s (V1 ( s ) V2 ( s ) = C 2 sV2 ( s ) )
R
R
1
1
V1 ( s ) C1 s + = V2 ( s ) C 1 s + C 2 s +
R
R
1
C1 s +
1
V2 ( s )
RC1 s + 1
R
=
=
V1 ( s ) C s + C s + 1 RC1 s + RC 2 s + 1 RC1
1
2
R
1
s+
RC1
=
1
C
s+ 2 s+
C1
RC1
Bila a =
V2 ( s )
C2
s+b
1
=
dan b =
maka
RC1
C1
V1 ( s ) s + as + b
Bank Soal Dasar Otomatisasi 2006
Copyright @ Mayor Lek Arwin D.W. Sumari, S.T.
30
Contoh 3. Rangkaian Paralel R diseri dengan C
Fungsi Transfer adalah perbandingan antara
output dan input suatu sistem.
FT
voutput
vinput
V2
VI
Analisa KCL
V1 = VRP + VC
RP =
R1.R2
R1 + R2
R .R 1
= I 1 2 + i dt
R1 + R2 C
R .R I ( s )
R .R
1
= I ( s) 1 2 +
V1 ( s ) = I ( s ) 1 2 +
R1 + R2 Cs
R 1 + R2 Cs
I ( s)
V2 ( s ) =
Cs
R R Cs + R1 + R2
I ( s ) = CsV2 ( s ) V1 ( s ) = V2 ( s )Cs 1 2
( R1 + R2 )Cs
V2 ( s )
R1 + R2
1
=
V1 ( s) R1 R2Cs + R1 + R2 R1.R2C
R1 + R2
R1 R2C
=
R + R2
s+ 1
R1 R2C
Bila =
R1 + R2
V ( s)
maka 2
=
R1 R2C
V1 ( s ) s +
Bank Soal Dasar Otomatisasi 2006
Copyright @ Mayor Lek Arwin D.W. Sumari, S.T.
31
Contoh 4. Rangkaian Paralel RC diseri dengan C
Fungsi Transfer adalah perbandingan antara
output dan input suatu sistem.
FT
voutput
v input
V2
VI
Analisa KCL
I = IR1 + IR2 IC1 = IC 2
d (V1 V2 )
dV
(V1 V2 ) (V1 V2 )
+
+ C1
= C2 2
R1
R2
dt
dt
V1 ( s ) V2 ( s ) V1 ( s ) V2 ( s )
+
+ C1 s (V1 ( s ) V2 ( s ) ) = C 2 sV2 ( s )
R1
R2
1
1
1
+ C1 s = V2 ( s ) +
+ C1 s + C 2 s
V1 ( s ) +
R1 R2
R1 R2
1
1
+
+ C1 s
V2 ( s )
R1 R2
=
1
1
V1 ( s )
+
+ C1 s + C 2 s
R1 R2
R1 + R2
R1 R2
=
R + R2
C1 s + C 2 s + 1
R1 R2
C1 s +
R1 R2 C1 s + R1 + R2
R1 R2
=
R1 R2C1 s + R1 R2C 2 s + R1 + R2
R1 R2
=
R1 R2C1 s + R1 + R2
R1 R2C1 s + R1 R2C 2 s + R1 R2
R1 R2C1 s + R1 + R2
s ( R1 R2C1 + R1 R2C 2 ) + R1 + R2
Bank Soal Dasar Otomatisasi 2006
Copyright @ Mayor Lek Arwin D.W. Sumari, S.T.
32
Contoh 5. Rangkaian Seri R dengan Paralel RC
Fungsi Transfer adalah perbandingan antara
output dan input suatu sistem.
FT
voutput
vinput
V2
VI
Analisa KCL
I = I R1 = I C + I R 2
=
V1 V2
dV V
=C 2 + 2
R1
dt
R2
V1 ( s ) V2 ( s )
V ( s)
= CsV2 ( s ) + 2
R1
R2
V1 ( s )
1
= V2 ( s ) Cs +
R1
R2
R
= V2 ( s ) R1Cs + 1
R2
R R Cs + R1
= V2 ( s ) 1 2
R2
Maka :
V2 ( s ))
R2
=
V1 ( s
R1 R2Cs + R1
R2
1
R1 R2C
R1C
=
=
R1
1
s+
s+
R2C
R1 R2C
Bila a =
1
1
V ( s)
a
,b=
maka 2
=
R1C
R2C
V1 ( s ) s + b
Bank Soal Dasar Otomatisasi 2006
Copyright @ Mayor Lek Arwin D.W. Sumari, S.T.
33
Contoh 6. Rangkaian Seri R dengan Paralel RC
Fungsi Transfer adalah perbandingan antara
output dan input suatu sistem.
FT
voutput
vinput
V2
VI
Analisa KVL
V1 = VR + VC 1 + V C 2
= IR +
1
1
i dt +
i dt
C1
C2
I ( s) I ( s)
V1 ( s ) = I ( s ) R +
+
C 1s C 2 s
1
1
= I ( s) R +
+
C 1s C 2 s
V2 = VC 1 + V C 2
=
1
1
i dt +
i dt
C1
C2
V2 ( s ) =
I ( s) I ( s)
+
C 1s C 2 s
1
1
= I ( s)
+
C 1s C 2 s
maka :
1
1
+
V2 ( s )
C 1s C 2 s
=
V1 ( s ) R + 1 + 1
C 1s C 2 s
Bila =
C1 + C 2
V2 ( s )
=
RC1C 2
V1 ( s ) s +
Bank Soal Dasar Otomatisasi 2006
Copyright @ Mayor Lek Arwin D.W. Sumari, S.T.
34
Contoh 7. Rangkaian Seri R, L dan C dengan VR
Fungsi Transfer adalah perbandingan antara
output dan input suatu sistem.
FT
voutput
vinput
vR
vI
Analisa KVL
v I = v L + vC + v R
=L
di ( t )
dt
1
i ( t ) dt + i ( t ) R
C
VI ( s ) = sLI ( s ) +
I ( s)
sC
VR ( s )
+ I ( s) R
= I ( s ) R + sL +
sC
2
s LC + sRC + 1
= I ( s)
sC
vR = i ( t ) R
VI ( s )
I ( s) R
s LC + sRC + 1
I (s)
sC
sRC
= 2
s LC + sRC + 1
R
s
L
=
R
1
s2 + s +
L LC
2
VR ( s ) = I ( s ) R
Bila
VR ( s )
V ( s)
R
1
2s
2s
=
= 2;
= 1 maka R
dan
sehingga hanya ada
= 2
VI ( s ) s + 2 s + 1
L
LC
VI ( s ) ( s + 1)2
pole tunggal pada s = 1
Bank Soal Dasar Otomatisasi 2006
Copyright @ Mayor Lek Arwin D.W. Sumari, S.T.
35
Contoh 8. Rangkaian Seri R, L dan C dengan VC
Fungsi Transfer adalah perbandingan antara
output dan input suatu sistem.
FT
voutput
vinput
vC
vI
Analisa KVL
v I = v L + vC + v R
=L
di ( t )
dt
1
i ( t ) dt + i ( t ) R
C
VI ( s ) = sLI ( s ) +
I ( s)
sC
+ I ( s) R
= I ( s ) R + sL +
sC
s 2 LC + sRC + 1
= I ( s)
sC
1
vC = i ( t ) dt
C
VC ( s ) =
Bila
I (s)
sC
I (s)
sC
=
VI ( s )
s 2 LC + sRC + 1
I ( s)
sC
VC ( s )
1
s LC + sRC + 1
1
=
1
R
s2 + s +
L LC
=
V ( s)
VR ( s )
R
1
1
1
=
dan
sehingga hanya ada
= 2;
= 1 maka R
= 2
L
LC
VI ( s ) s + 2 s + 1
VI ( s ) ( s + 1)2
pole tunggal pada s = 1
Bank Soal Dasar Otomatisasi 2006
Copyright @ Mayor Lek Arwin D.W. Sumari, S.T.
36
Contoh 9. Rangkaian Seri R, L dan C dengan VO
Fungsi Transfer adalah perbandingan antara
output dan input suatu sistem.
FT
voutput
vinput
vO
vI
Analisa KVL
v I = v L + vC + v R
=L
di ( t )
dt
1
i ( t ) dt + i ( t ) R
C
vO =
1
i ( t ) dt + i ( t ) R
C
VI ( s ) = sLI ( s ) +
I ( s)
sC
+ I ( s) R
= I ( s ) R + sL +
sC
s 2 LC + sRC + 1
= I ( s)
sC
VO ( s ) =
I ( s)
sC
+ I ( s) R
= I ( s) R +
sC
sRC + 1
= I ( s)
sC
sRC + 1
I ( s)
VO ( s )
sC
=
VI ( s )
s 2 LC + sRC + 1
I ( s)
sC
sRC + 1
s LC + sRC + 1
R
1
s +
L LC
=
R
1
s2 + s +
L LC
=
Bank Soal Dasar Otomatisasi 2006
Copyright @ Mayor Lek Arwin D.W. Sumari, S.T.
37
Maka pole sistem di atas adalah s1, 2 =
dimana a = 1; b =
R
R
1
4 (1)
L
L
LC
2
R
1
; c=
L
LC
Bank Soal Dasar Otomatisasi 2006
Copyright @ Mayor Lek Arwin D.W. Sumari, S.T.
38
Contoh 10. (Tabel 2.6). Rangkaian Diferensiasi
Fungsi Transfer adalah perbandingan antara
output dan input suatu sistem.
FT
voutput
vinput
v2 V2 ( s )
=
v1 V1 ( s )
Analisa KVL dan KCL
v1 = i ( t ) Z1 + i ( t ) R2
V2 ( s ) = I ( s ) R2
i ( t ) = C1
dva va
+
dt R1
V2 ( s )
V s
( )} + R( )
I ( s ) = C1 sVa ( s ) va 0+
1
= Va ( s ) sC1 +
R1
sR C + 1
= Va ( s ) 1 1
R1
R1
Va ( s ) = I ( s )
sR1C1 + 1
V1 ( s )
=
=
I ( s ) R2
R + R2 ( sR1C1 + 1)
I ( s) 1
sR1C1 + 1
R2 ( sR1C1 + 1)
R1 + R2 ( sR1C1 + 1)
sR1 R2C1 + R2
sR1 R2C1 + R1 + R2
s+
1
R1C1
R + R2
s+ 1
R1 R2C1
Bank Soal Dasar Otomatisasi 2006
Copyright @ Mayor Lek Arwin D.W. Sumari, S.T.
39
V1 ( s ) = Va ( s ) + I ( s ) R2
R1
= I (s)
+ I ( s ) R2
sR1C1 + 1
R1
= I (s)
+ R2
sR1C1 + 1
R + R2 ( sR1C1 + 1)
= I (s) 1
sR1C1 + 1
Bank Soal Dasar Otomatisasi 2006
Copyright @ Mayor Lek Arwin D.W. Sumari, S.T.
40
Contoh 11. (Tabel 2.6). Rangkaian Lead-lag (pimpin-ketinggalan)
Fungsi Transfer adalah perbandingan antara
output dan input suatu sistem.
FT
voutput
vinput
v2 V2 ( s )
=
v1 V1 ( s )
Proses awal sama dengan cara pada Contoh 4.
v1 = i ( t ) Z1 + i ( t ) R2
V2 ( s ) = I ( s ) R2 +
i ( t ) = C1
I ( s)
C2 s
R C s + 1
= I ( s) 2 2
C2 s
dva va
+
dt R1
V s
( )} + R( )
I ( s ) = C1 sVa ( s ) va 0+
1
= Va ( s ) sC1 +
R1
sR C + 1
= Va ( s ) 1 1
R1
sR C + 1
I ( s) 2 2
V2 ( s )
C2 s
=
V1 ( s )
sR C + ( sR2C 2 + 1)( sR1C1 + 1)
I ( s) 1 2
C 2 s ( sR1C1 + 1)
( sR1C1 + 1)( sR2C2 + 1)
sR1C 2 + ( sR2C 2 + 1)( sR1C1 + 1)
( sR1C1 + 1)( sR2C 2 + 1)
=
=
s 2 R1C1 R2C 2 + sR1C1 + sR2C 2 + sR1C 2 + 1
R1
Va ( s ) = I ( s )
sR1C1 + 1
( sR1C1 + 1)( sR2C2 + 1)
R1C1 R2C 2 + ( R1C1 + R2C 2 + R1C 2 ) s + 1
Bila a = R1C1 , b = R2C 2 , ab = R1C 2 maka :
V2 ( s )
(1 + a s )(1 + b s )
V1 (1) a b s 2 + ( a + b + ab ) s + 1
=
Bank Soal Dasar Otomatisasi 2006
Copyright @ Mayor Lek Arwin D.W. Sumari, S.T.
41
V1 ( s ) = Va ( s ) + I ( s ) R2
I ( s)
R1
= I (s)
+ I ( s ) R2 +
C2 s
sR1C1 + 1
R1
1
= I (s)
+ R2 +
C2 s
sR1C1 + 1
Bila 1 + 2 = a + b + ab , 1 = a , 2 = b
V2 ( s )
(1 + a s )(1 + b s )
V1 (1) (1 + 1 s )(1 + 2 s )
=
R1
sR C + 1
= I (s)
+ 2 2
C2 s
sR1C1 + 1
sR C + ( sR2C 2 + 1)( sR1C1 + 1)
= I (s) 1 2
C 2 s ( sR1C1 + 1)
Bank Soal Dasar Otomatisasi 2006
Copyright @ Mayor Lek Arwin D.W. Sumari, S.T.
42
Contoh 12. (Experiment not really complicated) Rangkaian Kombinasi
Fungsi Transfer adalah perbandingan
antara output dan input suatu sistem.
FT
voutput
vinput
v2 V2 ( s )
=
v1 V1 ( s )
Gunakan KCL sebagai berikut :
I1 = I 2 + I 3
Loop I
V1 I1 R1 I 2 R2 = 0
V1 ( I 2 + I 3 ) R1 I 2 R2 = 0
.. (1)
V1 I 2 ( R1 + R2 ) I 3 R1 = 0
Loop II
I 2 R2 I 3 sL I 3 R3 = 0
I 2 R2 I 3 ( sL + R3 ) = 0
.. (2)
Bank Soal Dasar Otomatisasi 2006
Copyright @ Mayor Lek Arwin D.W. Sumari, S.T.
43
Loop III
V2 I 3 R3 = 0
I3 =
.. (3)
V2
R3
Substitusi (3) ke (2)
I 2 R2
V2
( sL + R3 ) = 0
R3
I 2 R2 =
V2
( sL + R3 )
R3
I2 =
.. (4)
V2
( sL + R3 )
R2 R3
Substitusi (3) (4) ke (1)
V1
V2
V
( sL + R3 )( R1 + R2 ) 2 R1 = 0
R2 R3
R3
( sL + R3 )( R1 + R2 ) R1
V1 V2
+ =0
R2 R3
R3
( sL + R3 )( R1 + R2 ) + R1 R2
V1 V2
=0
R2 R3
( sL + R3 )( R1 + R2 ) + R1 R2
V1 = V2
R2 R3
R2 R3
V2
=
V1 ( sL + R3 )( R1 + R2 ) + R1 R2
=
R2 R3
sLR1 + sLR2 + R1 R3 + R2 R3 + R1 R2
R2 R3
sL ( R1 + R2 ) + R1 R3 + R2 R3 + R1 R2
R2 R3
R1 ( sL + R2 + R3 ) + R2 ( sL + R3 )
Bank Soal Dasar Otomatisasi 2006
Copyright @ Mayor Lek Arwin D.W. Sumari, S.T.
44
Contoh 13. (Experiment less complicated) Rangkaian Kombinasi
Fungsi Transfer adalah perbandingan antara
output dan input suatu sistem.
FT
voutput
vinput
v2 V2 ( s )
=
v1 V1 ( s )
Gunakan KCL sebagai berikut :
I1 = I 2 + I 3
Loop I
V1 I1 R1
I2
=0
sC
V1 ( I 2 + I 3 ) R1
I2
=0
sC
I 3 R1 = 0
V1 I 2 R1 +
sC
sR C + 1
V1 I 2 1
I 3 R1 = 0
sC
..
(1)
..
(2)
Loop II
I2
I 3 sL I 3 R2 = 0
sC
I2
I 3 ( sL + R2 ) = 0
sC
Bank Soal Dasar Otomatisasi 2006
Copyright @ Mayor Lek Arwin D.W. Sumari, S.T.
45
Loop III
V2 I 3 R2 = 0
I3 =
V2
R2
..
(3)
..
(4)
Substitusi (3) ke (2)
I2
I 3 ( sL + R2 ) = 0
sC
I 2 V2
=
( sL + R2 )
sC R2
I2 =
sC ( sL + R2 )
R2
V2
Substitusi (3) (4) ke (1)
sR C + 1
V1 I 2 1
I 3 R1 = 0
sCR2
sC ( sL + R2 ) sR1C + 1 V2
V1 V2
sC R R1 = 0
R2
2
( sL + R2 )( sR1C + 1) R1
+ =0
V1 V2
R2
R2
( sL + R2 )( sR1C + 1) + R1
V1 V2
=0
R2
s 2 R1 LC + sL + sR1 R2C + R2 + R1
V1 = V2
R2
V2
R2
= 2
V1 s R1 LC + sL + sR1 R2C + R2 + R1
=
R2
s R1 LC + s ( L + R1 R2C ) + R2 + R1
2
Bank Soal Dasar Otomatisasi 2006
Copyright @ Mayor Lek Arwin D.W. Sumari, S.T.
46
Contoh 14. (Experiment a bit complicated) Rangkaian Kombinasi
Fungsi Transfer adalah perbandingan antara
output dan input suatu sistem.
FT
voutput
vinput
v2 V2 ( s )
=
v1 V1 ( s )
Gunakan KCL sebagai berikut :
I1 = I 2 + I 3
Loop I
V1 I1 R1
I1
I 2 sL1 I 2 R2 = 0
sC1
1
V1 I1 R1 +
I 2 ( sL1 + R2 ) = 0
sC1
sR C + 1
V1 ( I 2 + I 3 ) 1 1 I 2 ( sL1 + R2 ) = 0
sC1
..
(1)
sR C + 1
sR C + 1
+ sL1 + R2 I 3 1 1 = 0
V1 I 2 1 1
sC1
sC1
s 2 L1C1 + sR1C1 + sR2C1 + 1
sR1C1 + 1
V1 I 2
I3
=0
sC1
sC1
Bank Soal Dasar Otomatisasi 2006
Copyright @ Mayor Lek Arwin D.W. Sumari, S.T.
47
Loop II
I 2 sL1 + I 2 R2 I 3 sL2
I3
=0
sC 2
1
I 2 ( sL1 + R2 ) I 3 sL2 +
=0
sC 2
..
(2)
..
(3)
..
(4)
s 2 L2C 2 + 1
I 2 ( sL1 + R2 ) I 3
=0
sC 2
Loop III
V2
I3
=0
sC 2
I 3 = V2 sC 2
Substitusi (3) ke (2)
s 2 L2C 2 + 1
I 2 ( sL1 + R2 ) V2 sC 2
=0
sC 2
I 2 ( sL1 + R2 ) = V2 s 2 L2C 2 + 1
s 2 L2C 2 + 1
I 2 = V2
sL1 + R2
Substitusi (3) (4) ke (1)
s 2 L1C1 + sR1C1 + sR2C1 + 1
sR1C1 + 1
V1 I 2
I3
=0
sC1
sC1
s 2 L2C 2 + 1 s 2 L1C1 + sR1C1 + sR2C1 + 1
sR1C1 + 1
V1 V2
V2 sC 2
=0
sC1
sL1 + R2
sC1
s 2 L2C 2 + 1 s 2 L1C1 + sR1C1 + sR2C1 + 1
sR1C1 + 1
V1 V2
= 0
+ sC 2
sC1
sL1 + R2
sC1
s 2 L2C 2 + 1 s 2 L1C1 + sR1C1 + sR2C1 + 1 sC ( sR C + 1)
1 1
+ 2
V1 V2
=0
sC1 ( sL1 + R2 )
sC1
s 2 L2C 2 + 1 s 2 L1C1 + sR1C1 + sR2C1 + 1 + sC 2 ( sR1C1 + 1)( sL1 + R2 )
V1 V2
=0
sC1 ( sL1 + R2 )
)(
)(
Bank Soal Dasar Otomatisasi 2006
Copyright @ Mayor Lek Arwin D.W. Sumari, S.T.
48
)(
s 2 L2C 2 + 1 s 2 L1C1 + sR1C1 + sR2C1 + 1 + sC 2 ( sR1C1 + 1)( sL1 + R2 )
V1 = V2
sC1 ( sL1 + R2 )
sC1 ( sL1 + R2 )
V2
= 2
2
V1
s L2C 2 + 1 s L1C1 + sR1C1 + sR2C1 + 1 + sC 2 ( sR1C1 + 1)( sL1 + R2 )
)(
(s LC
2
s 2 L1C1 + sR2C1
)(
) (
+ sR1C1 + sR2C1 + 1 s 2 L2C 2 + 1 + s 2 R1C1C 2 + sC 2
) ( sL + R )
1
Bank Soal Dasar Otomatisasi 2006
Copyright @ Mayor Lek Arwin D.W. Sumari, S.T.
49
REPRESENTASI SISTEM PADA BLOK DIAGRAM
Konsep Dasar
E ( s ) = R( s ) - B ( s )
B ( s) = C ( s ) H ( s ) E ( s ) = R( s) - C ( s ) H ( s )
C ( s ) = E ( s )G ( s )
= [ R( s ) - C ( s ) H ( s )]G ( s )
= G ( s )[ R( s ) - C ( s ) H ( s )]
= G ( s ) R( s ) - G ( s )C ( s ) H ( s )
C ( s ) + G ( s )C ( s ) H ( s ) = G ( s ) R( s )
C ( s )[1 + G ( s ) H ( s )] = G ( s ) R( s )
maka :
C ( s)
G ( s)
=
R( s ) 1 + G ( s ) H ( s )
Bank Soal Dasar Otomatisasi 2006
Copyright @ Mayor Lek Arwin D.W. Sumari, S.T.
50
Contoh 1. Sederhanakan Blok Diagram Sistem Kontrol di bawah ini !
Langkah 1 Pindahkan simpul Umpan Balik H 2 setelah Blok Sistem G4
Langkah 2 Gabungkan Blok Sistem G3 dengan G4
Bank Soal Dasar Otomatisasi 2006
Copyright @ Mayor Lek Arwin D.W. Sumari, S.T.
51
Langkah 3 Sederhanakan Blok Sistem G3G4 dengan Umpan Balik H1 berdasarkan rumus
Langkah 4 Gabungkan Blok Sistem G2 dengan Blok Sistem hasil dari Langkah 3
Langkah 5 Sederhanakan Blok Sistem hasil Langkah 4 dengan Umpan Balik
H2
G4
menjadi
Bank Soal Dasar Otomatisasi 2006
Copyright @ Mayor Lek Arwin D.W. Sumari, S.T.
52
Langkah 6 Gabungkan Blok Sistem G1 dengan Blok Sistem hasil dari Langkah 5
G1G2G3G4
= G6
Misalkan 1- G3G4 H1 + G2G3 H 2
maka
G6
C ( s)
=
R( s ) 1 + G6 H 3
C ( s)
R ( s)
G1G2G3G4
1- G3G4 H1 + G2G3 H 2
G1G2G3G4
1+
H3
1- G3G4 H1 + G2G3 H 2
G1G2G3G4
1- G3G4 H1 + G2G3 H 2 + G1G2G3G4 H 3
dan akhirnya
Fungsi Transfer Sistem Kontrol di atas adalah :
C ( s)
R ( s)
G1G2G3G4
1- G3G4 H1 + G2G3 H 2 + G1G2G3G4 H 3
Bank Soal Dasar Otomatisasi 2006
Copyright @ Mayor Lek Arwin D.W. Sumari, S.T.
53
Contoh 2. Sederhanakan Blok Diagram Sistem Kontrol di bawah ini !
Langkah 1
Langkah 2
Langkah 3
Bank Soal Dasar Otomatisasi 2006
Copyright @ Mayor Lek Arwin D.W. Sumari, S.T.
54
Contoh 3. Sederhanakan Blok Diagram Sistem Kontrol di bawah ini !
Langkah 1
Langkah 2
Bank Soal Dasar Otomatisasi 2006
Copyright @ Mayor Lek Arwin D.W. Sumari, S.T.
55
Contoh 2. Sederhanakan Blok Diagram Sistem Kontrol di bawah ini !
Langkah 1
Langkah 2
Langkah 3
Bank Soal Dasar Otomatisasi 2006
Copyright @ Mayor Lek Arwin D.W. Sumari, S.T.
56
Contoh 4. Sederhanakan Blok Diagram Sistem Kontrol di bawah ini !
Langkah 1
Langkah 2
Langkah 3
Bank Soal Dasar Otomatisasi 2006
Copyright @ Mayor Lek Arwin D.W. Sumari, S.T.
57
Contoh 4. Sederhanakan Blok Diagram Sistem Kontrol di bawah ini !
Langkah 1
Langkah 2
Langkah 3
Bank Soal Dasar Otomatisasi 2006
Copyright @ Mayor Lek Arwin D.W. Sumari, S.T.
58
Contoh 5. Sederhanakan Blok Diagram Sistem Kontrol di bawah ini !
Langkah 1
Langkah 2
Langkah 3
Bank Soal Dasar Otomatisasi 2006
Copyright @ Mayor Lek Arwin D.W. Sumari, S.T.
59
Contoh 6. Sederhanakan Blok Diagram Sistem Kontrol di bawah ini !
Langkah 1
Langkah 2
Bank Soal Dasar Otomatisasi 2006
Copyright @ Mayor Lek Arwin D.W. Sumari, S.T.
60
Langkah 3
Langkah 4
Maka fungsi transfernya adalah :
C (s )
R (s)
s3 + 1
2s4 + s 2 + 2s
Bank Soal Dasar Otomatisasi 2006
Copyright @ Mayor Lek Arwin D.W. Sumari, S.T.
61
Contoh 7. Rangkaian RC sederhana
Tahap-tahap
1.
Tulis persamaan dinamisnya (Gunakan KVL, KCL dan Hukum Ohm)
2.
Transformasi Laplace-kan persamaan dinamis tersebut dengan kondisi awal = 0.
3.
Representasikan tiap-tiap persamaan ke bentuk blok diagramnya.
4.
Gabungkan blok-blok diagram tersebut menjadi satu kesatuan.
5.
Lakukan penyederhanaan bila diperlukan.
Persamaan Dinamis
V1 = VR + VC
= IR +
V2 =
1
i dt
C
1
i dt
C
Bentuk Laplace
V1 ( s ) = I ( s ) R +
I ( s)
Cs
1
= I (s) R +
Cs
I ( s) =
V1 ( s ) V1 ( s ) Cs
=
1
RCs + 1
R+
Cs
I ( s)
V2 ( s ) =
Cs
V1 ( s ) Cs
= RCs + 1
Cs
V ( s)
1
= 1
= V1 ( s )
RCs + 1
RCs + 1
Bank Soal Dasar Otomatisasi 2006
Copyright @ Mayor Lek Arwin D.W. Sumari, S.T.
62
Representasi Blok Diagram
Gabungkan Blok-blok di atas menjadi satu kesatuan
Sederhanakan !
Bank Soal Dasar Otomatisasi 2006
Copyright @ Mayor Lek Arwin D.W. Sumari, S.T.
63
Bank Soal Dasar Otomatisasi 2006
Copyright @ Mayor Lek Arwin D.W. Sumari, S.T.
64
Contoh 5. Rangkaian Paralel RC diseri dengan R
Persamaan Dinamis
I = I R1 + I C 1
d (V1 V2 )
V V
= 1 2 + C1
R1
dt
V2 = IR2
Bentuk Laplace
I1 ( s ) =
=
V1 ( s ) V2 ( s )
V1 ( s )
R1
R1
+ C1 s (V1 ( s ) V2 ( s ) )
+ C1 sV1 ( s )
V2 ( s )
R1
+ CsV2 ( s )
= V1 ( s ) + C1 s V2 ( s ) + C1 s
R1
R1
1 + R1C1 S
1 + R1C1 S
= V1 ( s )
V2 ( s )
R1
R1
V2 ( s ) = I ( s ) R2 I ( s ) =
V2 ( s )
R2
Representasi Blok Diagram
Bank Soal Dasar Otomatisasi 2006
Copyright @ Mayor Lek Arwin D.W. Sumari, S.T.
65
Gabungkan Blok-blok di atas menjadi satu kesatuan
Sederhanakan !
Bank Soal Dasar Otomatisasi 2006
Copyright @ Mayor Lek Arwin D.W. Sumari, S.T.
66
REPRESENTASI SISTEM PADA SIGNAL FLOW GRAPH
(GRAFIK ALIRAN SINYAL)
Contoh 1. Blok Diagram ke Signal Flow Graph
Penyederhanaan Blok Diagram dan Signal Flow Graph suatu Sistem Pengaturan.
Cari
Fungsi Transfer sistem berikut ini !
Bank Soal Dasar Otomatisasi 2006
Copyright @ Mayor Lek Arwin D.W. Sumari, S.T.
67
Tahapan
a.
Geser umpan balik H 2 ke titik lepas landas sebelum G1 atau Va ( s )
b.
Gabungkan jalur maju G1 dan G2 menjadi G1G2 .
Bank Soal Dasar Otomatisasi 2006
Copyright @ Mayor Lek Arwin D.W. Sumari, S.T.
68
c.
Sederhanakan umpan balik H1 sesuai rumus yang berlaku.
d.
Dengan cara yang sama lakukan untuk umpan balik
H2
untuk mendapatkan fungsi
G1
transfer sistem tersebut.
Bank Soal Dasar Otomatisasi 2006
Copyright @ Mayor Lek Arwin D.W. Sumari, S.T.
69
e.
Maka fungsi transfernya adalah
C(s)
G 1G 2
=
R(s) 1-G 2 (H 2 -G 1H1 )
Bank Soal Dasar Otomatisasi 2006
Copyright @ Mayor Lek Arwin D.W. Sumari, S.T.
70
Contoh 2. Cari Fungsi Transfer Blok Diagram melalui Signal Flow Graph ala Mason
Fungsi Transfernya adalah :
Signal Flow Graph ala Mason
Tahap 1 Konversikan Blok Diagram ke bentuk SFG sebagai berikut :
Bank Soal Dasar Otomatisasi 2006
Copyright @ Mayor Lek Arwin D.W. Sumari, S.T.
71
Tahap 2 Eliminasi simpul pada lintasan bernilai 1 yang tidak mempengaruhi perhitungan.
Sebagai contoh adalah eliminasi simpul V3 ( s )
Tahap 3 Cari lintasan maju Pi sebagai berikut :
1
1
1 1
1
P1 = 1.s.s.1. .1 = s ; P2 = 1.s.s.1. .1 = s ; P3 = 1. .1. .1 = 2
s
s
s s
s
Tahap 4 Cari Loop Gain ( L j ) sebagai berikut :
L1 = s.s.1. ( 1) = s 2
L2 = s.s.1. ( 1) = s 2
1
1
L3 = .1. ( 1) =
s
s
1
L5 = s.s.1. .1. ( s ) = s 2
s
1
L4 = s.s.1. .1. ( s ) = s 2
s
1 1
1
L6 = .1. ( s ) =
s s
s
Tahap 5 Cari kombinasi 2-Non Touching Loop ( NTL2 j ).
Untuk SFG di atas tidak ada
atau bernilai 0.
Bank Soal Dasar Otomatisasi 2006
Copyright @ Mayor Lek Arwin D.W. Sumari, S.T.
72
Tahap 6 Cari menggunakan rumus sebagai berikut :
j
= 1 L j + NTL2 j ......
= 1 ( L1 + L2 + L3 + L4 + L5 + L6 ) + 0
1
1
= 1 s2 s2 s2 s2
s
s
2
= 1 + 4s 2 +
s
3
4s + s + 2
=
s
Tahap 6 Cari i , yakni dikurangi semua L j yang menyentuh lintasan maju Pi . Dalam
kasus ini 1 = 2 = 3 = 1 0 = 1
Tahap 7 Cari Fungsi Transfer dengan memasukkan nilai-nilai diatas ke persamaan Mason.
T ( s) =
C ( s)
R ( s)
=
0
Pi i
maka
C ( s)
R ( s)
P11 + P2 2 + P3 3
1
2 s3 + 1
C (s)
s2 =
s2
=
3
3
4s + s + 2
4s + s + 2
R(s)
s
s
3
2s + 1
= 4 2
4s + s + 2s
s.1 + s.1 +
Bank Soal Dasar Otomatisasi 2006
Copyright @ Mayor Lek Arwin D.W. Sumari, S.T.
73
Contoh 3. Cari Fungsi Transfer Blok Diagram melalui Signal Flow Graph ala Mason
Fungsi Transfernya adalah :
Signal Flow Graph ala Mason
Tahap 1 Konversikan Blok Diagram ke bentuk SFG sebagai berikut :
Bank Soal Dasar Otomatisasi 2006
Copyright @ Mayor Lek Arwin D.W. Sumari, S.T.
74
Tahap 2 Eliminasi simpul pada lintasan bernilai 1 yang tidak mempengaruhi perhitungan.
Sebagai contoh adalah eliminasi simpul V2 ( s ) dan V3 ( s ) .
Tahap 3 Cari lintasan maju Pi sebagai berikut :
1
1 1
1
P1 = 1.s 2 . .1 = s ; P2 = 1. . .1 = 2
s
s s
s
Tahap 4 Cari Loop Gain ( L j ) sebagai berikut :
L1 = s 2 . ( 1) = s 2
1
L3 = s 2 . . ( s ) = s 2
s
1
1
L2 = . ( 1) =
s
s
1 1
1
L4 = . . ( s ) =
s s
s
Tahap 5 Cari kombinasi 2-Non Touching Loop ( NTL2 j ).
Untuk SFG di atas tidak ada
atau bernilai 0.
Bank Soal Dasar Otomatisasi 2006
Copyright @ Mayor Lek Arwin D.W. Sumari, S.T.
75
Tahap 6 Cari menggunakan rumus sebagai berikut :
j
= 1 L j + NTL2 j ......
= 1 ( L1 + L2 + L3 + L4 + L5 + L6 ) + 0
1 1
= 1 s2 s2
s s
2
= 1 + 2s 2 +
s
3
2s + s + 2
=
s
Tahap 6 Cari i , yakni dikurangi semua L j yang menyentuh lintasan maju Pi . Dalam
kasus ini 1 = 2 = 3 = 1 0 = 1
Tahap 7 Cari Fungsi Transfer dengan memasukkan nilai-nilai diatas ke persamaan Mason.
T ( s) =
C ( s)
R ( s)
=
0
Pi i
maka
C ( s)
R ( s)
P11 + P2 2
s3 + 1
1
2
2
C ( s)
= 3 s
= 3s
R ( s ) 2s + s + 2 2s + s + 2
s
s
s+
s3 + 1
2s4 + s2 + 2s
Bank Soal Dasar Otomatisasi 2006
Copyright @ Mayor Lek Arwin D.W. Sumari, S.T.
76
Contoh 4. Cari Fungsi Transfer Blok Diagram melalui Signal Flow Graph ala Mason
Fungsi Transfernya adalah :
C ( s)
R ( s)
G1G2G3 + G1G3
1 + G2 H 2 + G3 H 3 + G1G2 H1 + G2G3 H 2 H 3 + G1G2G3 H1 H 3
Signal Flow Graph ala Mason
Tahap 1 Konversikan Blok Diagram ke bentuk SFG sebagai berikut :
Bank Soal Dasar Otomatisasi 2006
Copyright @ Mayor Lek Arwin D.W. Sumari, S.T.
77
Tahap 2 Eliminasi simpul pada lintasan bernilai 1 yang tidak mempengaruhi perhitungan.
Sebagai contoh adalah eliminasi simpul V2 ( s ) dan V3 ( s ) .
Tahap 3 Cari lintasan maju Pi sebagai berikut :
P1 = 1.G1.G2 .G3 .1 = G1G2G3 ; P2 = 1.G1.1.G3 .1 = G1G3
Tahap 4 Cari Loop Gain ( L j ) sebagai berikut :
L1 = G1.G2 . ( H1 ) = G1G2 H1
L2 = G2 .1. ( H 2 ) = G2 H 2
L3 = G3 . ( H 3 ) = G3 H 3
Tahap 5 Cari kombinasi 2-Non Touching Loop ( NTL2 j ).
NTL1 = ( G1G2 H1 )( G3 H 3 ) = G1G2G3 H1 H 3
NTL2 = ( G2 H 2 )( G3 H 3 ) = G2G3 H 2 H 3
Bank Soal Dasar Otomatisasi 2006
Copyright @ Mayor Lek Arwin D.W. Sumari, S.T.
78
Tahap 6 Cari menggunakan rumus sebagai berikut :
j
= 1 L j + NTL2 j ......
= 1 ( L1 + L2 + L3 ) + ( NTL1 + NTL2 )
= 1 ( G1G2 H1 G2 H 2 G3 H 3 ) + ( G1G2G3 H1 H 3 + G2G3 H 2 H 3 )
= 1 + G1G2 H1 + G2 H 2 + G3 H 3 + G1G2G3 H1 H 3 + G2G3 H 2 H 3
= 1 + G2 H 2 + G3 H 3 + G1G2 H1 + G2G3 H 2 H 3 + G1G2G3 H1 H 3
Tahap 6 Cari i , yakni dikurangi semua L j yang menyentuh lintasan maju Pi . Dalam
kasus ini 1 = 2 = 1- 0 = 1
Tahap 7 Cari Fungsi Transfer dengan memasukkan nilai-nilai di atas ke persamaan
Mason.
T ( s) =
C ( s)
R ( s)
C ( s)
R ( s)
=
0
Pi i
maka
C ( s)
R ( s)
P11 + P2 2
G1G2G3 + G1G3
1 + G2 H 2 + G3 H 3 + G1G2 H1 + G2G3 H 2 H 3 + G1G2G3 H1 H 3
Bank Soal Dasar Otomatisasi 2006
Copyright @ Mayor Lek Arwin D.W. Sumari, S.T.
79
ANALISA SISTEM PENGATURAN MELALUI 3 (TIGA) METODE PEMODELAN
Contoh 1. Rangkaian RC seri.
Analisa Persamaan Diferensial
V = VR + VC
1
i dt
C
dV
dI I
I ( s)
=R +
R sI ( s ) i 0+ +
=0
dt
dt C
C
1
I ( s ) Rs + = Rio
C
Rio
RCio
I ( s) =
=
1 RCs + 1
Rs +
C
1
I ( s) =
i
dV
1 o
dimana
s+
dt
RC
= IR +
( )}
( )
= 0, i 0+ = io
t =0
Bank Soal Dasar Otomatisasi 2006
Copyright @ Mayor Lek Arwin D.W. Sumari, S.T.
80
I=
V1 V2
dV
=C 2
R
dt
d 2V
dI 1 d (V1 V2 )
dI
=
= C 22
dt R
dt
dt
dt
=0
t =0
1
R
{( sV ( s ) v (0 ) ) ( sV ( s ) v
+
(0+ )
)} = C s V ( s) sv (0 ) dv dt(0 )
Dengan asumsi initial condition v 1 (0+ ) = v 2 (0+ ) = 0 dan
dv 2 (0+ )
= 0 maka :
dt t =0
sV1 ( s ) sV2 ( s )
= Cs 2V2 ( s )
1
R
V
s
V
s
2
(
)
(
)
1
2
2
sV1 ( s ) sV2 ( s ) = RCs V2 ( s ) maka
=
atau
= RC
V1 ( s ) RCs + 1
V1 ( s ) s + 1
V1 ( s ) V2 ( s ) = RCsV2 ( s )
RC
V1 ( s ) = V2 ( s )( RCs + 1)
Analisa Blok Diagram
I=
V1 V2
R
I ( s) =
V2 =
V1 ( s ) V2 ( s )
R
1
i dt
C
V2 ( s ) =
I ( s)
Cs
Bank Soal Dasar Otomatisasi 2006
Copyright @ Mayor Lek Arwin D.W. Sumari, S.T.
81
Langkah 1 Representasikan masing-masing persamaan di atas ke bentuk Blok Diagram.
Langkah 2 Gabungkan kedua Blok Diagram di atas.
Langkah 3 Sederhanakan !
Bank Soal Dasar Otomatisasi 2006
Copyright @ Mayor Lek Arwin D.W. Sumari, S.T.
82
Analisa Signal Flow Graph
Langkah 1 Representasikan masing-masing persamaan di atas ke bentuk Signal Flow
Graph.
Langkah 2 Gabungkan kedua Signal Flow Graph di atas.
Langkah 3 Sederhanakan !
Bank Soal Dasar Otomatisasi 2006
Copyright @ Mayor Lek Arwin D.W. Sumari, S.T.
DAFTAR PUSTAKA
1.
____________, Dasar Otomatisasi, Diktat Kuliah Karbol AAU, Skep Gubernur
AAU No.Skep/250/XII/1994 tanggal 23 Desember 2004, AAU, Yogyakarta, 2004.
2.
Dorf, Richard C. dan Robert H. Bishop, Modern Control System, 9th Ed.,
Prentice-Hall, USA, 2004.
3.
Kuo, Benjamin C., Automatic Control Engineering, 7th Ed., Prentice-Hall, USA,
1997.
4.
Morris, S. Brian, Automated Manufacturing System: Actuators, Controls,
Sensors and Robotics, Glencoe McGraw-Hill, USA, 1995.
5.
Ogata, Katsuhiko, Modern Control Engineering, 2nd Ed., Prentice-Hall, USA,
1990.
6.
Stubberud, Allen J.; Ivan J. Williams dan Joseph J. DiStefano, Schaums Outline
of Feedback and Control System, 2nd Ed., McGraw-Hill, USA, 1994.
Anda mungkin juga menyukai
- Panduan HalalDokumen78 halamanPanduan Halals_pamungkas50% (2)
- 2007-2-00527-SK - Bab 2Dokumen100 halaman2007-2-00527-SK - Bab 2Erlin KusumadewiBelum ada peringkat
- Solusi VSD,,DDokumen2 halamanSolusi VSD,,DYoga PratamaBelum ada peringkat
- PneumatikDokumen31 halamanPneumatikmuzabi_09Belum ada peringkat
- Jbptppolban GDL s1 2007 Supriatna0 2635 09 2007 eDokumen9 halamanJbptppolban GDL s1 2007 Supriatna0 2635 09 2007 eYoga PratamaBelum ada peringkat
- Bab IDokumen4 halamanBab IYoga PratamaBelum ada peringkat
- Model Matematis Sistem Dinamik - Modul AjarDokumen53 halamanModel Matematis Sistem Dinamik - Modul AjarYoga Pratama100% (3)
- Surat PernyataanDokumen1 halamanSurat PernyataanYoga PratamaBelum ada peringkat
- Jenis Garis (Gambar Teknik)Dokumen8 halamanJenis Garis (Gambar Teknik)Yoga PratamaBelum ada peringkat
- Lembar Rekapitulasi Nilai PKLDokumen1 halamanLembar Rekapitulasi Nilai PKLYoga PratamaBelum ada peringkat
- Raw 1Dokumen49 halamanRaw 1Yoga PratamaBelum ada peringkat
- SAP K3 Kls 1.2011Dokumen2 halamanSAP K3 Kls 1.2011Yoga PratamaBelum ada peringkat
- Lembar KegiatanDokumen3 halamanLembar KegiatanYoga PratamaBelum ada peringkat
- Halaman Sampul DepanDokumen1 halamanHalaman Sampul DepanYoga PratamaBelum ada peringkat
- Laporan HUkum OhmDokumen4 halamanLaporan HUkum OhmYoga PratamaBelum ada peringkat
- Soft StarterDokumen11 halamanSoft StarterYoga Pratama100% (1)
- Bahan ListrikDokumen80 halamanBahan ListrikYoga PratamaBelum ada peringkat
- 3617 7947 1 PBDokumen8 halaman3617 7947 1 PBborix69Belum ada peringkat
- Kerangka KaranganDokumen1 halamanKerangka KaranganYoga Pratama100% (1)
- Kata PengantarDokumen1 halamanKata PengantarYoga PratamaBelum ada peringkat