4momentum Linear Dan Tumbukan
4momentum Linear Dan Tumbukan
Diunggah oleh
Nur Zainah BuhariJudul Asli
Hak Cipta
Format Tersedia
Bagikan dokumen Ini
Apakah menurut Anda dokumen ini bermanfaat?
Apakah konten ini tidak pantas?
Laporkan Dokumen IniHak Cipta:
Format Tersedia
4momentum Linear Dan Tumbukan
4momentum Linear Dan Tumbukan
Diunggah oleh
Nur Zainah BuhariHak Cipta:
Format Tersedia
Momentum Linear dan Tumbukan
BAB
IV
4.1 Pengantar
4.2 Momentum dan Hubungannya dengan Gaya
4.3 Kekekalam Momentum
4.4 Sistem dengan Massa yang Berubah
4.5 Tumbukan dan Impuls
4.6 Kekekalan Energi dan Momentum pada Tumbukan
4.7 Tumbukan Eleastik dalam Satu Dimensi
4.8 Tumbukan Elastik dalam Dua atau Tiga Dimensi
4.9 Pusat Massa
4.10 Pusat Massa dan Gerak Translasi
AL
4.1 Pengantar
Hukum kekekalan energi yang dibahas dalam bab terdahulu, hanyalah salah satu hukum
N
kekekalan di dalam fisika. Kuantitas lain yang ditemukan memiliki sifat kekal adalah
FI
momentum linier, momentum sudut dan muatan listrik. Pada bab ini kita akan
membahas momentum linier dan kekalannya. Selanjutnya dengan menggunakan hukum
kekekalan momentum serta hukum kekekalan energi, kita akan menganalisis tumbukan.
Tumbukan terjadi jika ada interaksi “obyek”, sering disebut “partikel”, baik partikel
tunggal (seperti ledakan bom), maupun partikel ganda (seperti tumbukan antara dua
kelereng). Tumbukan dari interaksi partikel ganda tidak harus bersinggungan satu sama
lain. Tumbukan seperti ini disebut “interaksi medan”.
4.2 Momentum dan Hubungannya dengan Gaya
Momentum linier dari sebuah partikel didefinisikan sebagai hasil kali antara massa dan
kecepatan partikel tersebut. Momentum linier umumnya dinyatakan dengan simbol p.
Jika m menyatakan massa partikel dan v adalah kecepatannya, maka momentum linier
(selanjutnya disebut saja “momentum”) p adalah:
Fisika Dasar IV-1
Momentum Linear dan Tumbukan
p = mv (4.1)
Karena kecepatan adalah sebuah vektor, maka momentum haruslah merupakan vektor.
Arah momentum sama dengan arah kecepatan, dan besar momentum adalah p = mv.
Karena v bergantung pada kerangka acuan maka kerangka ini haruslah ditetapkan.
Sebuah gaya diperlukan untuk mengubah momentum dari sebuah partikel, baik besar
maupun arahnya. Pernyataan Hukum II Newton dapat ditafsirkan dalam bahasa
momentum sebagai berikut: “Laju perubahan momentum dari sebuah partikel sebanding
dengan gaya resultan yang bekerja padanya”. Secara matematis ditulis:
p
F t (4.2)
dengan F adalah gaya total yang bekerja pada obyek dan p adalah perubahan
momentum resultan yang terjadi selama selang waktu t. Jika sistem terdiri dari sebuah
partikel bermassa m konstan, maka dengan memasukkan persamaan (4.1) ke persamaan
(4.2) kita dapatkan bentuk Hukum II Newton yang lazim kita gunakan selama ini.
p mv mv o
F t t
AL
m(v v o ) mv v
ma, karena a
t t t
N
Pada sistem partikel banyak yang terdiri dari n partikel dengan massa masing-masing
FI
m1, m2, m3…..mn, sistem secara keseluruhan memiliki momentum total p. Momentum
total didefinisikan sebagai jumlah vektor semua momentum partikel dalam kerangka
acuan yang sama, yaitu;
p = p1 + p2 + …. + pn
= m1v1 + m2v2 +…+ mnvn (4.3)
dengan v1 adalah kecepatan m1, v2 adalah kecepatan m2, dan vn adalah kecepatan
partikel ke-n bermassa mn.
4.3 Kekekalam Momentum
Hukum kekekalan momentum adalah hukum kekekalan kedua yang diulas dalam buku
ini; yang pertama adalah hukum kekekalan energi. Pada pertengahan abad ke-17
ditemukan bahwa jumlah momentum dari dua obyek yang bertumbukan adalah konstan.
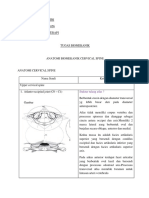
Contoh tumbukan dua bola billiard (Gambar 4.1).
Fisika Dasar IV-2
Momentum Linear dan Tumbukan
Andaikan gaya eksternal total pada sistem ini adalah nol. Selanjutnya, meskipun
momentum dari tiap-tiap bola berubah karena tumbukan, ternyata jumlah momentumnya
ditemukan sama sebelum dan sesudah tumbukan.
m1v1 m2v2 Jika m1v1 adalah momentum dari bola 1 dan m 2v2 adalah
momentum dari bola 2, keduanya diukur sebelum tumbukan,
maka momentum total kedua bola sebelum tumbukan adalah
m1v’1 m2v’2 m1v1+m2v2.
Gambar 4.1 Tumbukan dua
buah bola billiard
Setelah tumbukan, tiap-tiap bola mempunyai kecepatan dan momentum yang berbeda,
yakni m1v’1 dan m2v’2. Momentum total setelah tumbukan adalah m 1v’1+m2v’2. Dengan
demikian tanpa gaya eksternal berlaku:
m1v1+m2v2 = m1v’1+m2v’2 (4.4)
Dalam hal ini, vektor momentum total dari sistem dua bola adalah kekal atau konstan.
Meskipun prinsip kekekalan momentum ditemukan secara eksperimental, namun kita
AL
dapat juga menurunkannya dari hukum gerak Newton. Dari Gambar 4.1, anggap gaya F
terdapat pada satu bola dan mendorong bola lain selama tumbukan. Gaya rata-rata
N
selama waktu tumbukan t diberikan oleh:
FI
F = p/t atau F t =p (4.5)
Jika persamaan (4.5) diterapkan pada bola 1 (Gambar 4.1) dengan mengambil kecepatan
bola 1 adalah v1 dan v’1 adalah kecepatan bola 1 setelah tumbukan, maka Ft=m1v’1-
m1v1.
Dalam hubungan diatas, F adalah gaya pada bola 1 mendorong bola 2, dan t adalah
waktu kontak kedua bola selam tumbukan. Bilamana persamaan (4.5) diterapkan pada
bola 2, berdasarkan hukum Newton ketiga, gaya pada bola 2 terhadap bola 1 adalah F,
sehingga ditulis -Ft=m2v’2-m2v2.
Kombinasi persamaan untuk bola 1 dan bola 2 diperoleh:
m1v’1-m1v1= -( m2v’2-m2v2) atau m1v’1+ m2v’2 = m1v1+ m2v2.
Fisika Dasar IV-3
Momentum Linear dan Tumbukan
Persamaan terakhir diatas menunjukkan bahwa jika jumlah gaya-gaya yang bekerja pada
sistem adalah nol, maka p=0, sehingga tidak ada perubahan momentum total. Jadi
pernyataan umum “ hukum kekekalan momentum” adalah “Momentum total dari suatu
sistem terisolir adalah konstan”.
Contoh 1.
Sebuah mobil dengan massa 10.000 kg bergerak dengan kecepatan 24,0 m/s menabrak
mobil sejenis yang sedang mogok. Selanjutnya kedua mobil berjalan beriringan setelah
bertabrakan. Berapa kecepatan kedua mobil?
Jawab.
Momentum total awal adalah m1v1+ m2v2 = (10.000 kg)(24,0m/s)+ (10.000 kg)(24,0m/s)
=2,4x105 kgm/s. Setelah tumbukan, kedua mobil bergerak dengan kecepatan yang sama
(mobil berjalan mendorong mobil mogok), jadi: (m1+m2)v’=2,4x105kgm/s. Maka v’ =
(2,4x105kgm/s) / (2,0x104 kg) =12,0 m/s.
4.4 Sistem dengan Massa yang Berubah
AL
Pada pasal-pasal terdahulu telah dibahas sistem dengan massa total M yang tetap
terhadap waktu. Sekarang akan dibahas sistem dengan massa yang berubah. Jika
N
terdapat massa yang masuk ke dalam sistem, laju perubahan massa dM/dt diberi tanda
FI
positif; sebaliknya jika terdapat massa yang keluar diberi tanda negatif. Contoh yang
aktual dari sistem ini adalah roket yang diluncurkan.
t v t+t v+v
M-M
M
u
a b
Gambar 4.2 Peluncuran roket (a) pada saat peluncuran (b) pada saat t+t
Gambar 4.2a memperlihatkan sebuah sistem bermassa M yang bergerak dengan
kecepatan v terhadap kerangka acuan tertentu. Gaya eksternal Feks bekerja pada sistem.
Setelah saat berikutnya t+ t, susunannya berubah menjadi seperti dalam gambar 4.2b.
Massa sebesar M keluar dari sistem dan bergerak dengan kecepatan u terhadap
Fisika Dasar IV-4
Momentum Linear dan Tumbukan
pengamat. Massa dan kecepatan sistem berubah secara berurutan menjadi M-M dan
v+v. Berdasarkan persamaan (4.2):
p p f pi
Feks (4.6)
t t
Dengan pf adalah momentum akhir sistem (Gambar 4.2b) dan pi adalah momentum awal
sistem (Gambar 4.2a). Momentum akhir sistem diberikan oleh:
p f ( M M )(v v) Mu (4.7a)
Momentum awal sistem adalah:
pi =Mvi (4.7b)
Sehingga persamaan (4.6) menjadi:
[(M M )(v v) Mu] [mv]
Feks
t (4.8)
v M
M [u (v v)]
t t
Jika t dibuat menuju nol, keadaan Gambar 4.2b mendekati keadaan Gambar 4.2a,
dalam hal ini v/t mendekati dv/dt. Besaran M adalah massa yang ditolakkan dalam
waktu t. Karena perubahan massa benda terhadap waktu, dM/dt, dalam hal ini harus
AL
berharga negatif, maka ketika t manuju nol, besaran positif M/t kita ganti dengan –
dM/dt. Akhirnya, v menuju nol bila t menuju nol. Dengan demikian persamaan (4.8)
N
FI
menjadi:
dv dM dM
Feks M v u (4.9a)
dt dt dt
d ( Mv) dM
atau Feks u (4.9b)
dt dt
Persamaan (4.9) merupakan pernyataan matematis dari Hukum II Newton, yang
mendefinisikan gaya luar pada obyek yang massanya berubah. Kita perhatikan bahwa
jika laju perubahan massa adalah nol (massa konstan) maka pernyataan (4.9) akan
kembali ke bentuk lazim yaitu F=Ma.
Contoh 2.
Sebuah senapan mesin dipasang di atas kereta yang dapat menggelinding bebas tanpa
gesekan di atas permukaan horizontal. Massa sistem (kereta+senapan) pada satu saat
tertentu adalah M. Pada saat tersebut senapan memuntahkan perluru-peluru bermassa m
dengan kecepatan u terhadap kerangka acuan. Kecepatan kereta dalam kerangka ini
Fisika Dasar IV-5
Momentum Linear dan Tumbukan
adalah v dan kecepatan peluru terhadap kereta adalah u-v. Banyaknya peluru yang
ditembakkan terhadap satuan waktu adalah n. Hitung percepatan yang dialami kereta!
Jawab.
Anggap tidak ada gaya eksternal yang bekerja pada sistem, maka berdasarkan
dv dM
persamaan (4.19a) kita peroleh: M v real , disini dv/dt = a (percepatan sistem),
dt dt
vreal =u-v, dan dM/dt = -mn yaitu laju pengurangan massa sistem tiap satuan waktu. Ma
mn
= (vreal)(-mn) atau a v real .
M
5.5 Tumbukan dan Impuls
Pada saat dua benda bertumbukan, keduanya umumnya mengalami deformasi yang
melibatkan gaya-gaya yang kuat. Gaya-gaya tersebut adalah gaya kontak berdasarkan
hukum Newton kedua, persamaan (4.2), besar vektor gaya tersebut adalah:
F=(p/t) (4.10)
AL
F
Persamaan ini tentu saja diterapkan pada masing-masing benda
dalam suatu tumbukan. Dipahami bahwa tumbukan umumnya
N
terjadi dalam waktu yang sangat singkat sehingga gaya kontak
FI
dapat ditulis dalam bentuk infinitesimal t 0, yakni F=dp/dt.
t
Jika kedua ruas persamaan (4.10) dikalikan dengan selang
t
waktu t, diperoleh:
Gambar 4.3 Besar
impuls oleh luas kurva Ft=p (4.11)
Kuantitas ruas kiri persamaan (4.11), yakni perkalian antara gaya F dengan interval
waktu t, disebut “impuls”. Disini terlihat bahwa perubahan total pada momentum sama
dengan impuls. Konsep impuls hanya terdapat pada tumbukan yang berlangsung sangat
singkat. Besar impuls dinyatakan oleh luas di bawh kurva Gambar 4.3.
Contoh 3.
a. Hitung impuls yang dialami oleh seseorang yang bermassa 70 kg pada tanah
setelah melompat dari ketinggian 3,0 m.
b. Kemudian perkiraan gaya rata-rata yang didorongkan kaki orang tersebut oleh
tanah kalau mendarat dengan kaki tegak
Fisika Dasar IV-6
Momentum Linear dan Tumbukan
c. Sama dengan soal b tetapi kaki bengkok. Dalam hal ini, anggap tubuh bergerak
1,0 cm selama tumbukan, dan pada kasus kedua, bilamana kaki bengkok sekitar
50 cm.
Jawab.
a. Ambil percepatan sebesar a=g=9,8 m/s2, dan kecepatan awal vo =0. Maka
kecepatan tubuh saat mencapai tanah:
v=[2a(y-yo)]1/2 = [2(9,8m/s2)(,0m)]1/2 = 7,7 m/s. Impuls pada tubuh orang
tersebut:
Ft =p = p – po =0-(70 kg) (7,7 m/s) = -542 Ns
Tanda negatif menunjukkan bahwa arah gaya berlawanan dengan arah
momentum tubuh (gaya arahnya ke atas)
b. Tubuh berkurang kecepatnnya dari 7,7 m/s menjadi nol dalam jarak d=1,0
cm=1,0x10-2m. Laju rata-rata selama perioda ini adalah v=(7,7+0)/2=3,8 m/s.
sehingga waktu tumbukan diberikan oleh t=d/v =(1,0x10-2m)/(3,8m/s) = 2,6
x10-3 s. Besar gaya rata-rata orang tersebut (arah ke bawah); F= impuls/t =
AL
(540 Ns)/(2,6x10-3) = 2,1x105 N dan F = Ftanah – mg, maka:
Ftanah = F + mg = (2,1x105N) + (70 kg)(9,8 m/s2)
N
= 2,1x105 N + 690 N =2,1x105N
FI
c. d = 50 cm = 0,5 m.
t =d / v = (0,5 m)/(3,8 m/s) = 0,13 s
f =(540 Ns)/(0,13 s) = 4,2x103 N
ftanah = F + mg = $,2x103 N + 0,6x103 N = 4,9x103 N.
5.6 Kekekalan Energi dan Momentum pada Tumbukan
Pada pasal 4.2 telah dikemukakan adanya kekekalan momentum total pada tumbukan
antara dua obyek (bola biliard). Jika kedua obyek sangat keras dan elastis serta tidak ada
panas yang dihasilkan pada saat kedua obyek bertumbukan, maka energi kinetik adalah
kekal. Ini berarti bahwa energi kinetik sebelum dan sesudah tumbukan adalah sama.
Tumbukan dimana energi total adalah kekal disebut “tumbukan elastik”sedangkan
tumbukan dimana energi kinetik total tidak kekal disebut “tumbukan tidak elastik”.
Tumbukan elastik:
Fisika Dasar IV-7
Momentum Linear dan Tumbukan
(1/2)m1v12+(1/2)m2v22 =(1/2)m1v1’2+(1/2)m2v2’ 2 (4.12)
m1v1+m2v2 =m1v1’+m2v2’
Tumbukan tidak elastik:
(1/2)m1v12+(1/2)m2v22 =(1/2)m1v1’2+(1/2)m2v2’ 2 + energi termal + bentuk energi lain
m1v1+m2v2 =m1v1’+m2v2’
Jadi pada tumbukan elastik berlaku hukum kekekalan energi kinetik dan hukum
kekekalan momentum; pada tumbukan tidak elastik tidak berlaku hukum kekekalan
energi kinetik namun berlaku hukum kekekalan momentum.
5.7 Tumbukan Eleastik dalam Satu Dimensi
Pada uraian berikut ini diterapkan kekekalan momentum dan energi kinetik buat
tumbukan elastik antara dua obyek kecil (partikel) yang saling bertumbukan, sedemikian
hingga semua gerak terjadi sepanjang garis lurus. Anggap bahwa kedua partikel
bergerak dengan kecepatan awal v1 dan v2 sepanjang sumbu-x (Gambar 4.4a). Setelah
tumbukan, kecepatannya masing-masing berubah menjadi v1’ dan v2’ (Gambar 4.4b).
AL
Dari hukum kekekalan momentum, kita peroleh; m1v1+m2v2 =m1v1’+m2v2’. Oleh karena
tumbukan dianggap elastik, energi kinetik juga kekal; (1/2)m1v12+(1/2)m2v22
N
=(1/2)m1v1’2+(1/2)m2v2’ 2. Jika massa dan kecepatan awal diketahui, maka dengan
FI
menggambarkan kedua persamaan di atas kecepatan sesudah tumbukan, yakni v1’ dan
v2’ dapat ditentukan.
y y
m1v1 m2v2 m1v’1 m2v’2
x x
a b
Gambar 4.4 Tumbukan elastik dua obyek kecil (a). Sebelum tumbukan, (b). Setelah
tumbukan
Persamaan kekekalan momentum dan energi kinetik dapat dituliskan kembali sebagai
berikut:
m1( v1 – v1’) =m2 (v2’-v2) (4.13)
2 2 2 2
m1( v1 – v1’ ) =m2( v2’ – v2 ) (4.14a)
Persamaan (4.14a) dapat dituliskan kembali seperti;
Fisika Dasar IV-8
Momentum Linear dan Tumbukan
m1( v1 – v1’) ( v1+ v1’)= m2 (v2’-v2) (v2’+v2) (4.14b)
Jika persamaan (4.14b) dibagikan dengan (4.13), diperoleh;
( v1+ v1’)= (v2’+v2) atau ( v1 – v2)=( v2’- v1’) (4.15)
Dari persamaan (4.13) dan (4.15), dapat dinyatakan kecepatan akhir terhadap kecepatan
awal.
m m2 2m 2
v1 1 v1 v 2
1m m 2 m1 m2
2m1 m m1
v 2 v1 2 v 2
m1 m 2 m1 m 2
Contoh 4.
Dari data pada gambar dibawah ini, hitunglah
v1=5m/s v2 =-10m/s
m1 M2
Gambar 4.5 Tumbukan elastik satu dimensi
a. Kecepatan m1 dan m2 setelah tumbukan, bila tumbukannya bersifat elastik satu
AL
dimensi
b. Energi kinetik total sebelum tumbukan
N
c. Energi kinetik total setelah tumbukan dari hasil jawaban pertanyaan a.
FI
Jawab.
Karena bidang licin, maka Feks 0, yaitu W N 0 . Jadi kita dapat menggunakan
hubungan-hubungan diatas dengan ketentuan v1 = 5 m/s dan v2 = - 10 m/s.
30 g 20 g 2 x 20 g
v1 (5m / s) (10m / s) 7m / s
a. 30 g 20 g 30 g 20 g
2 x30 g 20 g 30 g
v 2 (5m / s) (10m / s) 8m / s
30 g 20 g 30 g 20 g
b. Ek (total) = (1/2)m1v12+(1/2)m2v22
= (1/2)(30x10-3kg)(5m/s)2+(1/2)(20x10-3kg)(-10 m/s)2
= 1,375 J
c. E’k (total) = (1/2)m1v1’2+(1/2)m2v2’ 2
= (1/2) (30x10-3kg)(-7m/s)2+(1/2)(20x10-3kg)(8m/s)2
= 1,375 J.
Fisika Dasar IV-9
Momentum Linear dan Tumbukan
5.8 Tumbukan Elastik dalam Dua atau Tiga Dimensi
Prinsip kekekalan momentum dan energi dapat juga diterapkan untuk tumbukan dalam
dua atau tiga dimensi. Untuk kasus demikian, kaidah vektor kembali berperan penting.
Contoh tumbukan semacam ini dapat dilihat pada permainan billiar, serta tumbukan
atom-atom. Gambar 4.5 memperlihatkan partikel 1 bermassa m 1 bergerak sepanjang
sumbu-x dan menumbuk partikel 2 bermassa m 2 yang mula-mula dalam keadaan diam.
Setelah kedua partikel terhambur, m 1= membentuk sudut 1 terhadap x dan m2
membentuk sudut 2 terhadap sumbu-x.
m1 p1 ’ y
m1 p1 ’ y
m1 m2 1’
x
m1
p1 m2 1’2’
m2 x
p1 2’ p2’
m2
p2’
AL
Gambar 4.5 Tumbukan elastik dalam dua dimensi
Dari kekekalan energi kinetik diperoleh hubungan:
N
(1/2)m1v12+(1/2)m2v22 =(1/2)m1v1’2+(1/2)m2v2’ 2
FI
Dari kekekalan momentum diperoleh:
p1 = p1’+p2’
Jika diuraikan dalam komponen vektornya, diperoleh:
px = px1’+px2’
m1v1 = m1v1’ cos 1’ +m2v2’ cos 2’ (4.16b)
py = py1’+py2’
0 = m1v1’ sin 1’ +m2v2’ sin 2’ (4.16c)
Ketiga persamaan (4.16a,b dan c) di atas bebas satu sama lain dan dapat ditemukan tiga
variabel yang tidak diketahui jika variabel lainnya diketahui.
Contoh 5.
Sebuah peluru bermassa 10 kg bergerak pada sumbu-x positif dengan kecepatan 140
m/s. Jika peluru ini kemudian pecah menjadi 3 bagian dengan data sebagai berikut:
Fisika Dasar IV-10
Momentum Linear dan Tumbukan
m1 = 3kg, v1x = 210 m/s, v1y = -180 m/s, v1z = 80 m/s
m2 = 4 kg, v2x = 105 m/s, v2y =40 m/s, v2z = -60 m/s, maka
a. Nyatakan momentum linier awal peluru yakni pox, poy, poz.
b. Tuliskan persamaan komponen momentum linier akhir arah x,y,z (setelah peluru
terpecah tiga, abaikan gaya gravitasi)
c. Jika pecahan ketiga bermassa 3 kg tentukanlah besar dan arah kecepatan pecahan
tersebut.
Jawab.
a. Momentum awal peluru
pox = mvox = (10 kg) (140 m/s) = 1400 kg m/s
poy = mvoy = (10 kg) (0) = 0
poz = mvoz = (10 kg) (0) = 0
b. Momentum liniar akhir yaitu;
pfx = m1 v1x + m2 v2x + m3 v3x = (3x210)+(4x105)+ p3x=1400
pfy = m1 v1y+m2v2y+ m3 v3y = (3x(-180))+(4x40)+ p3y=0
AL
pfz = m1 v1z + m2 v2z + m3 v3z =(3x80)+(4x(-60))+ p3z=0
pfx = 630 + 420 + p3x=1400
N
pfy =-540 + 160+ p3y=0
FI
pfz = 240 – 240 + p3z=0
c. Besar dan arah pecahan ketiga
p3x=1400-1050=350 kgm/s, maka v3x = 350/3=116,7 m/s
p3y=0 + 380 = 380 kg m/s, maka v3y = 380/3 =126,7 m/s
p3z=0, maka v3z = 0/3 = 0 m/s
Besar kecepatan
v3 v32x v32y v32z (116,7) 2 (126,7) 2 (0) 2 172m / s
126,7
arahnya tg 1 47,3 o terhadap sumbu-x
116,7
5.9 Pusat Massa
Sejauh ini obyek yang ditinjau diperlakukan sebagai partikel tunggal. Dalam gerak
translasi, tiap-tiap titik pada obyek mengalami pergeseran yang sama dengan titik
Fisika Dasar IV-11
Momentum Linear dan Tumbukan
lainnya sepanjang waktu, sehingga gerak dari satu partikel menggambarkan gerak
keseluruhan obyek. Tetapi, walaupun dalam geraknya obyek berotasi ataupunm
bervibrasi, ada satu titik pada obyek yang bergerak serupa dengan gerak sebuah partikel
bila dikenai gaya luar yang sama, titik tersebut dinamakan “pusat massa”.
Tinjau sistem dua partikel m1 dan m2 yang masing-masing berjarak x1 dan x2 dari titik
pusat 0. Pusat massa sistem terletak pada jarak x cm dari titik pusat 0, dengan xcm
didefinisikan sebagai (lihat gambar 4.6).
m1 x1 m2 x 2 m1 x1 m2 x 2
xcm (4.17)
m1 m2 M
dengan M=m1+m2 adalah massa total sistem. Pusat massa terletak pada garis antara m 1
dan m2. Jika kedua massa sama (m1=m2=m), xcm persis berada di tengah, karena dalam
m( x1 x 2 ) x1 x 2
kasus ini x cm .
2m 2
y
AL
x1
Jika m1> m2, maka pusat massa akan bergeser mendekati
x2 m1. Sebaliknya jika m1<m2 maka pusat massa akan
N
m1 m2 bergeser mendekati m2.
x
xcm
FI
Gambar 4.6 Pusat massa
sistem dua buah benda
Jika kita mempunyai n partikel m 1, m2, .. mn sepanjang garis lurus, maka menurut
definisi, pusat massa partikel-partikel ini terhadap suatu titik asal adalah:
m1 x1 m2 x 2 ... mn x n mi xi
xcm (4.18)
m1 m2 ... mn mi
dengan x1, x2,..xn adalah jarak masing-masing massa terhadap titik asal yang digunakan
untuk mengukur xcm.
Untuk banyak partikel yang tersebar dalam ruang dan tidak harus segaris ataupun tidak
harus sebidang, pusat massanya berada pada xcm, ycm, zcm, masing-masing dinyatakan
sebagai berikut:
Fisika Dasar IV-12
Momentum Linear dan Tumbukan
x cm
m x i i
, y cm
m y i i
, z cm
m z i i
(4.19a)
M M M
Dalam notasi vektor, masing-masing partikel dalam sistem dapat dinyatakan dengan
vektor posisi rI dalam suatu sistem koordinat tertentu dan pusat massanya ditunjukkan
oleh vektor posisi rcm. Vektor-vektor ini dihubungkan dengan xI, yI, zI dan xcm, ycm dan
zcm dalam persamaan (4.19a) melalui
rI=ixi+jyI+kzI, dan rcm = ixcm+jycm+kzcm.
Dengan demikian, ketiga persamaan (4.19a) dapat digantikan dengan sebuah persamaan
vektor;
rcm
m r i i
(4.19b)
M
Persamaan (4.19b) menyatakan bahwa jika titik asal kerangka acuan dipilih pada titik
pusat t massa (rcm=0), maka sistem tersebut berlaku mi ri 0 .
Suatu benda tegar dapat dipandang sebagai sistem partikel yang saling berdekatan dan
sangat rapat sehingga dapat ditentukan pusat massanya. Caranya kita bagi-bagi benda
AL
menjadi n buah elemen kecil yang masing-masing bermassa mi. Jika mI dibuat sangat
kecil (mI 0), maka letak pusat massa dinyatakan dalam bentuk vektor diberikan oleh:
N
1
rcm r.dm
FI
(4.20)
m
Dalam pernyataan diatas, dm adalah elemen massa diferensial pada posisi r dari titik
asal kerangka acuan.
Contoh 6.
Tentukan letak pusat massa sistem yang terdiri atas tiga partikel dengan massa
masimng-masing m1 = 1,0 kg, m2 = 2,0 kg dan m3 =3,0 kg. Partikel tersebut masing-
masing terletak di titik sudut segitiga sama sisi dengan rusuk 1,0 m.
Jawab.
y3 m3
Pilih sumbu-x berimpit dengan salah satu sisi segitiga
seperti pada Gambar 4.7. x3 = ½ meter.
rcm y3 = [12-(1/2)2]2 = (3/4)1/2
m1 r3 m2 x (m)
Gambar 4.7 Sistem tiga
partikel
Fisika Dasar IV-13
Momentum Linear dan Tumbukan
xcm
m x i i
(1kg)(0) (2kg)(1m) (3kg)(1 / 2m) 7
m
M (1 2 3)kg 2
y cm
m y i i
(1kg)(0) (2kg)(0) (3kg)(3 / 4)1 / 2 m 31 / 2
m
M (1 2 3)kg 4
5.10 Pusat Massa dan Gerak Translasi
Tinjau gerak sekumpulan partikel, masing-masing dengan massa m1, m2,…mn. Massa
keseluruhan M dianggap konstan. Persamaan (4.19b) dapat dituliskan kembali sebagai
Mrcm = m1r1 + m2 r2 +….+ mn rn
dengan rcm adalah vektor posisi yang menyatakan letak pusat massa partikel dalam suatu
kerangka acuan tertentu. Persamaan ini diferensiasikan terhadap waktu sehingga
diperoleh:
drcm dr dr dr
M m1 1 m2 2 ..... mn n atau
dt dt dt dt
AL
Mvcm = m1v1 + m2 v2 +….+ mn vn (4.21)
drn dr
dengan v n adalah kecepatan partikel ke-n, dan v cm cm kecepatan pusat massa.
N
dt dt
FI
Persamaan (4.21) mengungkapkan bahwa momentum total dari sistem sama dengan
hasil kali massa total dengan kecepatan pusat massa sistem. Persamaan (4.21)
dideferensiasikan terhadap waktu, sehingga
dvcm dv dv dv
M m1 1 m2 2 ..... mn n atau
dt dt dt dt
Macm = m1a1 + m2 a2 +….+ mn an (4.22)
dengan acm adalah percepatan pusat massa sistem, sedang an adalah percepatan partikel
ke-n. Berdasarkan hukum II Newton, persamaan (4.22) dapat ditulis menjadi:
Macm = F1+ F2 +….+ Fn = Ftotal (4.23)
Fisika Dasar IV-14
Momentum Linear dan Tumbukan
Jadi jumlah semua gaya yang bekerja pada sistem sama dengan massa total sistem
dikalikan dengan percepatan pusat massanya. Pusat massa sistem bergerak seperti
sebuah partikel tunggal bermassa M dibawah pengaruh gaya eksternal total .
SOAL LATIHAN
1. Sebuah benda bermassa 2 kg bergerak di atas bidang datar yang licin dengan
kelajuan tetap 5 m/dtk, dikerjakan gaya yang besarnya berubah terhadap waktu
dan arahnya sama dengan arah gerak benda. Gaya tersebut mempunyai harga
2000 N pada saat t=0 dtk dan berharga nol pada saat t=0,05 dtk.
2. Pada sebuah tetes hujan jatuh melalui
lapisan kabut. Tetes hujan ini makin lama
makin besar akibat proses pengembunan.
Besarnya laju perbesaran tetes hujan ini
AL
sebanding dengan luas penampang dengan
kecepatan tetes air (kAv), dimana k adalah
N
konstanta. Hitunglah percepatan air hujan
FI
(anggap tetes hujan ini mula-mula diam dan
Beberapa saat setelah hujan reda
berukuran sangat kecil).
V1
v2 M
3 Sebuah Mobil mainan bermassa m=2 kg
m
meluncur sepanjang meja tanpa gesekan
l
dengan laju 10 m/dtk.
Di muka mobil mainan tersebut terdapat sebuah mobil ambulance (mainan) yang
bermassa M = 5 kg dan bergerak dengan kecepatan 3 m/dtk dalam arah yang
sama. Sebuah pegas tak bermassa dengan konstanta pegas k = 1120 N/m
dipasang di belakang mobil ambulance M (lihat gambar disamping). Berapa jauh
mampatan pegas (pegas tidak bengkok).
Fisika Dasar IV-15
Momentum Linear dan Tumbukan
4 Sebuah balok dengan massa M=100 kg dalam
keadaan diam di atas meja panjang tanpa v
gesekan. Ujung kanan meja terdapat dinding. M m
l
Balok lain bermassa m diletakkan diantara alok pertama dan dinding dan
digerakkan ke kiri dengan laju konstan v (lihat gbr). Dengan menganggap bahwa
semua tumbukan benar-benar elastik, tentukanlah harga m agar kedua balok
bergerak dengan kecepatan yang sama setelah m menumbuk M.
ω
5 a Sebuah bola elastis dengan massa M
v dan jari- jari a bergerak dengan
θo kecepatan v menumbuk suatu
permukaan dengan sudut terhadap
garis vertikal.
Anggap bola itu slip ketika bersetuhan dengan permukaan itu. Koefisien gesek
AL
antara bola dengan permukaan adalah . Hitung pada sudut berapa bola akan
N
meninggalkan permukaan itu (anggap tidak ada gravitasi). Berapa perubahan
kecepatan sudut bola sebelum dan sesudah tumbukan.
FI
Fisika Dasar IV-16
Anda mungkin juga menyukai
- Kepaniteraan 2Dokumen12 halamanKepaniteraan 2Nur Irfa RamadhaniBelum ada peringkat
- Materi Pak AnsharDokumen44 halamanMateri Pak AnsharNur Irfa RamadhaniBelum ada peringkat
- Alur Bimbingan Skripsi-KtiDokumen3 halamanAlur Bimbingan Skripsi-KtiNur Irfa RamadhaniBelum ada peringkat
- Makalah Penatalaksanaan Fisioterapi Pada Kasus Hemiparese DekstraDokumen38 halamanMakalah Penatalaksanaan Fisioterapi Pada Kasus Hemiparese DekstraNur Irfa RamadhaniBelum ada peringkat
- Lapsus HNP Sri HartinaDokumen78 halamanLapsus HNP Sri HartinaNur Irfa RamadhaniBelum ada peringkat
- Bab I LBPDokumen29 halamanBab I LBPNur Irfa RamadhaniBelum ada peringkat
- YalovDokumen12 halamanYalovNur Irfa RamadhaniBelum ada peringkat
- KEHAMILAN Dengan KERAM GASTROCDokumen22 halamanKEHAMILAN Dengan KERAM GASTROCNur Irfa RamadhaniBelum ada peringkat
- Stuktur Tulang Atlas ?Dokumen20 halamanStuktur Tulang Atlas ?Nur Irfa RamadhaniBelum ada peringkat
- FZDokumen71 halamanFZNur Irfa RamadhaniBelum ada peringkat
- TugasDokumen9 halamanTugasNur Irfa RamadhaniBelum ada peringkat
- Lapsus Perawatan Syaraf (Multiplle Lumbal Canal Stenosis)Dokumen30 halamanLapsus Perawatan Syaraf (Multiplle Lumbal Canal Stenosis)Nur Irfa RamadhaniBelum ada peringkat