Anda mungkin juga menyukai
- FormDokumen1 halamanFormAngfika Septianto WijayaBelum ada peringkat
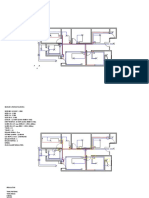
- IL Rumah GarudaDokumen2 halamanIL Rumah GarudaAngfika Septianto WijayaBelum ada peringkat
- 7 Steps Fastener Tightening ProceduresDokumen2 halaman7 Steps Fastener Tightening ProceduresAngfika Septianto WijayaBelum ada peringkat
- M.005.R03 Job Safety Environment Analysis (JSEA)Dokumen3 halamanM.005.R03 Job Safety Environment Analysis (JSEA)Angfika Septianto WijayaBelum ada peringkat
- FormDokumen1 halamanFormAngfika Septianto WijayaBelum ada peringkat
- Guideline - KPI Serviceman Upload To SFDokumen6 halamanGuideline - KPI Serviceman Upload To SFAngfika Septianto WijayaBelum ada peringkat
- ID NoneDokumen6 halamanID NoneAngfika Septianto WijayaBelum ada peringkat
- Bab6 KontakLogam Semi ConduktorDokumen27 halamanBab6 KontakLogam Semi ConduktorAngfika Septianto WijayaBelum ada peringkat
- Rundown TravelDokumen3 halamanRundown TravelAngfika Septianto WijayaBelum ada peringkat
- CC FormDokumen2 halamanCC FormAngfika Septianto WijayaBelum ada peringkat
- Kul2 - GejalaTransport 27 09 2016Dokumen6 halamanKul2 - GejalaTransport 27 09 2016Angfika Septianto WijayaBelum ada peringkat
- Laporan Se NewDokumen20 halamanLaporan Se NewAngfika Septianto WijayaBelum ada peringkat
- Percobaan 7-9Dokumen6 halamanPercobaan 7-9Angfika Septianto WijayaBelum ada peringkat
- Modul InstrumenDokumen26 halamanModul InstrumenAngfika Septianto WijayaBelum ada peringkat
- Bab 1 Fix (PWM)Dokumen3 halamanBab 1 Fix (PWM)Angfika Septianto WijayaBelum ada peringkat
- Fik Kelompok CampDokumen23 halamanFik Kelompok CampAngfika Septianto WijayaBelum ada peringkat
- Lembar Asistensi RLDokumen2 halamanLembar Asistensi RLAngfika Septianto WijayaBelum ada peringkat
- Latihan Soal 1Dokumen6 halamanLatihan Soal 1Angfika Septianto WijayaBelum ada peringkat
- SK Bupati Berau No 668 Tahun 2018Dokumen3 halamanSK Bupati Berau No 668 Tahun 2018Angfika Septianto WijayaBelum ada peringkat