Anda mungkin juga menyukai
- Teknik Pencarian HeuristikDokumen25 halamanTeknik Pencarian HeuristikBinet Care100% (3)
- SBP MergedDokumen444 halamanSBP Mergedzekri fitra ramadhanBelum ada peringkat
- Proposal IR Heuristic MatchingDokumen25 halamanProposal IR Heuristic MatchingFadhli RobbyBelum ada peringkat
- Ai - #4 Metode Pencarian Dan PelacakanDokumen44 halamanAi - #4 Metode Pencarian Dan PelacakanToni KhalimiBelum ada peringkat
- Modul 3 Pencarian HeuristikDokumen29 halamanModul 3 Pencarian HeuristikmahbaraBelum ada peringkat
- Pencarian HeuristikDokumen30 halamanPencarian Heuristikimmanuel MatthewBelum ada peringkat
- Bahan 4 Ai Pencarian HeuristikDokumen31 halamanBahan 4 Ai Pencarian HeuristikikhsanBelum ada peringkat
- 9 TemuDokumen21 halaman9 TemuAlanBelum ada peringkat
- Search 2Dokumen24 halamanSearch 2Rony KurniawanBelum ada peringkat
- Ai - HilclimbingDokumen24 halamanAi - HilclimbingyogaBelum ada peringkat
- Minggu 4 Metode Pencarian - HeuristikDokumen25 halamanMinggu 4 Metode Pencarian - HeuristikFika ChuBelum ada peringkat
- Modul 3 - Pelacakan Atau Pencarian HeuristikDokumen44 halamanModul 3 - Pelacakan Atau Pencarian HeuristikYuthan JufandriBelum ada peringkat
- Pertemuan 5. Metode Pencarian Dan Pelacakan 2 (Heuristik)Dokumen26 halamanPertemuan 5. Metode Pencarian Dan Pelacakan 2 (Heuristik)muhammad syaukaniBelum ada peringkat
- Kecerdasan Buatan PERTEMUAN 3Dokumen31 halamanKecerdasan Buatan PERTEMUAN 3galuh saputriBelum ada peringkat
- Pencarian Heuristic Pert 3Dokumen29 halamanPencarian Heuristic Pert 3TU ElektroBelum ada peringkat
- AI - 04 Pencarian HeuristikDokumen30 halamanAI - 04 Pencarian HeuristikADH ChannelBelum ada peringkat
- TP2-W7-S11-R1 JawabanDokumen6 halamanTP2-W7-S11-R1 JawabanHamid100% (2)
- 4c630c0b59539hill Climbing Kecerdasan BuatanDokumen12 halaman4c630c0b59539hill Climbing Kecerdasan BuatanAndri WijaksonoBelum ada peringkat
- Algoritma Pencarian HeuristikDokumen53 halamanAlgoritma Pencarian HeuristikMohamad Fauzi Agung PamujiBelum ada peringkat
- Tugas Personal Ke-2 (Minggu 7 / Sesi 11) : Barang Nilai (RP) Berat (KG)Dokumen2 halamanTugas Personal Ke-2 (Minggu 7 / Sesi 11) : Barang Nilai (RP) Berat (KG)Fajrianto ManungkiBelum ada peringkat
- Kecerdasan BuatanDokumen3 halamanKecerdasan BuatanIsman IrawanBelum ada peringkat
- New Problem Solving With SearchingDokumen70 halamanNew Problem Solving With SearchingmuhandhisBelum ada peringkat
- Pertemuan 6 Informed Search Strategy - 2018Dokumen38 halamanPertemuan 6 Informed Search Strategy - 2018Info KerjaBelum ada peringkat
- Matematika DasarDokumen34 halamanMatematika DasarRoziqin KhoirurBelum ada peringkat
- LKPD Kedudukan Dua GarisDokumen4 halamanLKPD Kedudukan Dua GarisIckien AlhasanieBelum ada peringkat
- CPM Pert 2Dokumen17 halamanCPM Pert 2Eko Sulkhani Y S.Pi, M.SiBelum ada peringkat
- Agus Sepriyandiansah 182410102081 UTS Kecerdasan BuatanDokumen10 halamanAgus Sepriyandiansah 182410102081 UTS Kecerdasan BuatanAgus SepriyandiansahBelum ada peringkat
- Data CBRDokumen11 halamanData CBRMuhammad Rais F.A.Belum ada peringkat
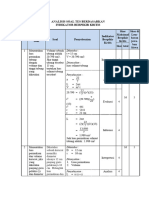
- Analisis Soal Tes BerdasarkanDokumen5 halamanAnalisis Soal Tes BerdasarkanJon KuswantoBelum ada peringkat
- Heuristik Search RahmadDokumen5 halamanHeuristik Search RahmadSanz WillyBelum ada peringkat
- Fungsi KuadratDokumen14 halamanFungsi KuadratTareq GhifariBelum ada peringkat
- Algoritma Branch and BoundDokumen9 halamanAlgoritma Branch and BoundfajarfBelum ada peringkat
- Pertemuan 3-ANALISIS JARINGANDokumen31 halamanPertemuan 3-ANALISIS JARINGANnawaluna uhailul husnaBelum ada peringkat
- Metode Pencarian HeuristikDokumen22 halamanMetode Pencarian HeuristikfelucheyBelum ada peringkat
- Week 67 8 Dan 9 Algorithms Uninformed and Informed Search StrategiesDokumen37 halamanWeek 67 8 Dan 9 Algorithms Uninformed and Informed Search Strategiesagustinus adryBelum ada peringkat
- Percobaan Faktor Tunggal - RBSLDokumen19 halamanPercobaan Faktor Tunggal - RBSLRudianto PasapanBelum ada peringkat
- Modul 3 - Pencarian HeuristikDokumen33 halamanModul 3 - Pencarian HeuristikAhmad HaidarohBelum ada peringkat
- Pertemuan 13: Penyelesaian Dengan Algoritma Pemrograman GreedyDokumen14 halamanPertemuan 13: Penyelesaian Dengan Algoritma Pemrograman GreedyDessi MuristhaBelum ada peringkat
- Tugas Individu 9Dokumen27 halamanTugas Individu 9Jasmeen Ayu AnsariBelum ada peringkat
- Tugas Mata Kuliah: Statistika Tugas 5B Analisis Regresi Linear GandaDokumen32 halamanTugas Mata Kuliah: Statistika Tugas 5B Analisis Regresi Linear GandadamayBelum ada peringkat
- Modul Belajar Komputer Teknik Autocad 2010Dokumen21 halamanModul Belajar Komputer Teknik Autocad 2010antonius Umbi leleBelum ada peringkat
- Metode TopsisDokumen10 halamanMetode TopsisLord GamingBelum ada peringkat
- PLSV DAN PTLSVDokumen6 halamanPLSV DAN PTLSVpenamatikaBelum ada peringkat
- Math Brilian (CAra CePaT)Dokumen60 halamanMath Brilian (CAra CePaT)daniel guloBelum ada peringkat
- Desain Bujur SangkarDokumen30 halamanDesain Bujur SangkarAnggini PangestuBelum ada peringkat
- LKS PGL (Persamaan Garis Lurus)Dokumen3 halamanLKS PGL (Persamaan Garis Lurus)busanx91% (11)
- 818 - Revisi JawabanDokumen6 halaman818 - Revisi JawabanDoni apriadiBelum ada peringkat
- Rekapan Presentasi UJi StatistikaDokumen12 halamanRekapan Presentasi UJi StatistikaPutri Dwi RBelum ada peringkat
- Statistika Ketidakpastian PengukuranDokumen6 halamanStatistika Ketidakpastian PengukuranMac Yusuf100% (2)
- 136 RBSLDokumen6 halaman136 RBSLAde SetiawanBelum ada peringkat
- Makalah Uji LanjutDokumen19 halamanMakalah Uji LanjutAnonymous jDt5Nd7NBelum ada peringkat
- Modul Kecerdasan Buatan Bab 3 Informed SearchDokumen14 halamanModul Kecerdasan Buatan Bab 3 Informed SearchvairraBelum ada peringkat
- Sistem Operasi MacosDokumen11 halamanSistem Operasi MacosHafiz FakhryBelum ada peringkat
- Modul DianDokumen160 halamanModul DianHafiz FakhryBelum ada peringkat
- Sistem Operasi MacosDokumen11 halamanSistem Operasi MacosHafiz FakhryBelum ada peringkat
- Sistem Operasi MacosDokumen11 halamanSistem Operasi MacosHafiz FakhryBelum ada peringkat
- Tugas 1Dokumen2 halamanTugas 1Hafiz FakhryBelum ada peringkat
- MAKALAHDokumen8 halamanMAKALAHHafiz Fakhry100% (1)
- Makalah Install DebianDokumen36 halamanMakalah Install DebianHafiz FakhryBelum ada peringkat
- Proxy ServerDokumen10 halamanProxy ServerHafiz FakhryBelum ada peringkat