Anda mungkin juga menyukai
- Soal Dan Jawaban Test GAT PLN PDFDokumen9 halamanSoal Dan Jawaban Test GAT PLN PDFRahmatullah Hidayathi50% (2)
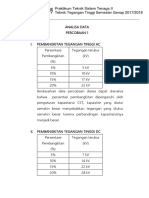
- Analisa Data 1Dokumen2 halamanAnalisa Data 1Dewi Anugrah RizqiBelum ada peringkat
- LJ 2216105063 Dewi Anugrah RDokumen12 halamanLJ 2216105063 Dewi Anugrah RDewi Anugrah RizqiBelum ada peringkat
- Elza Dwi RDokumen6 halamanElza Dwi RDewi Anugrah RizqiBelum ada peringkat
- Studi Koordinasi Proteksi Sistem Ketenagalistrikan Dengan Konfigurasi Beban TanurDokumen2 halamanStudi Koordinasi Proteksi Sistem Ketenagalistrikan Dengan Konfigurasi Beban TanurDewi Anugrah RizqiBelum ada peringkat
- Pengaturan Kecepatan Motor InduksiDokumen2 halamanPengaturan Kecepatan Motor InduksiDewi Anugrah RizqiBelum ada peringkat
- Proposal Konsultan NoirDokumen8 halamanProposal Konsultan NoirDewi Anugrah RizqiBelum ada peringkat
- Pernyataan Untuk Proposal Ta-1Dokumen1 halamanPernyataan Untuk Proposal Ta-1Dewi Anugrah RizqiBelum ada peringkat
- Ditl Tugas 1Dokumen3 halamanDitl Tugas 1Dewi Anugrah RizqiBelum ada peringkat
- Dewi PSTLDokumen2 halamanDewi PSTLDewi Anugrah RizqiBelum ada peringkat
- Isi Artikel 677549238672Dokumen8 halamanIsi Artikel 677549238672Dewi Anugrah RizqiBelum ada peringkat
- Elza PSTLDokumen2 halamanElza PSTLDewi Anugrah RizqiBelum ada peringkat
- Lightning Arrester GuideDokumen18 halamanLightning Arrester GuideDewi Anugrah RizqiBelum ada peringkat
- Aplikasi Motor InduksiDokumen2 halamanAplikasi Motor InduksiDewi Anugrah RizqiBelum ada peringkat
- Muatan Listrik dan Hukum CoulombDokumen23 halamanMuatan Listrik dan Hukum CoulombDewi Anugrah RizqiBelum ada peringkat
- Studi Perencanaan Pembangkit Listrik Tenaga Mikro Hidro (PLTMH) Di Sungai Soko Desa Olung Siron Kecamatan Tanah Siang Kabupaten Murung Raya Provinsi Kalimantan TengahDokumen7 halamanStudi Perencanaan Pembangkit Listrik Tenaga Mikro Hidro (PLTMH) Di Sungai Soko Desa Olung Siron Kecamatan Tanah Siang Kabupaten Murung Raya Provinsi Kalimantan TengahFaizal TamimBelum ada peringkat
- Seminar Kerja PraktekDokumen1 halamanSeminar Kerja PraktekDewi Anugrah RizqiBelum ada peringkat
- VSD StartingDokumen9 halamanVSD StartingDewi Anugrah RizqiBelum ada peringkat
- 09 DTE 2016 02753 AbstractDokumen2 halaman09 DTE 2016 02753 AbstractDewi Anugrah RizqiBelum ada peringkat
- Proposal Kerja PraktekDokumen9 halamanProposal Kerja PraktekDewi Anugrah RizqiBelum ada peringkat
- DISTRIBUSIDokumen25 halamanDISTRIBUSIOki Oktora RinaldiBelum ada peringkat
- TrafoDokumen1 halamanTrafoDewi Anugrah RizqiBelum ada peringkat
- VSD StartingDokumen9 halamanVSD StartingDewi Anugrah RizqiBelum ada peringkat
- 09-DTE-02753-Bab IDokumen5 halaman09-DTE-02753-Bab IDewi Anugrah RizqiBelum ada peringkat
- 09-DTE-02753-Bab IDokumen5 halaman09-DTE-02753-Bab IDewi Anugrah RizqiBelum ada peringkat
- 11-DTE-02753-Bab IIIDokumen40 halaman11-DTE-02753-Bab IIIDewi Anugrah Rizqi100% (1)
- TaDokumen31 halamanTaDewi Anugrah RizqiBelum ada peringkat
- MOTORINDUKSIDokumen31 halamanMOTORINDUKSISohibul HajahBelum ada peringkat
- 10-DTE-02753-Bab IIDokumen26 halaman10-DTE-02753-Bab IIDewi Anugrah RizqiBelum ada peringkat