Anda mungkin juga menyukai
- Formulir Data Anggota AspilukiDokumen1 halamanFormulir Data Anggota AspilukiWildan Thoyib KBelum ada peringkat
- Blangko Pembaruan KTADokumen2 halamanBlangko Pembaruan KTAWildan Thoyib KBelum ada peringkat
- Pengumuman Penerimaan PPNPN KLHKDokumen2 halamanPengumuman Penerimaan PPNPN KLHKGaluh Ayudian PratiwiBelum ada peringkat
- Brosur & Pricelist Muara Indah Residence CompDokumen3 halamanBrosur & Pricelist Muara Indah Residence CompWildan Thoyib KBelum ada peringkat
- Pengumuman Penerimaan PPNPN KLHKDokumen2 halamanPengumuman Penerimaan PPNPN KLHKGaluh Ayudian PratiwiBelum ada peringkat
- Laporan Keuangan PP IKA SKMADokumen18 halamanLaporan Keuangan PP IKA SKMAWildan Thoyib KBelum ada peringkat
- Contoh Surat Permohonan Pembukaan RekDokumen1 halamanContoh Surat Permohonan Pembukaan RekfajarBelum ada peringkat
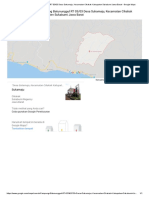
- Peta Desa Sukamaju di Kabupaten SukabumiDokumen1 halamanPeta Desa Sukamaju di Kabupaten SukabumiWildan Thoyib KBelum ada peringkat
- Lampiran 1 Nama PerpusdesDokumen5 halamanLampiran 1 Nama PerpusdesWildan Thoyib KBelum ada peringkat
- Daftar Perguruan Tinggi FiksDokumen1 halamanDaftar Perguruan Tinggi FiksWildan Thoyib KBelum ada peringkat
- Panduan 2019Dokumen11 halamanPanduan 2019Rachmat RasyadBelum ada peringkat
- XCZXCDokumen5 halamanXCZXCWildan Thoyib KBelum ada peringkat
- Surat Penawaran Beasiswa 2020Dokumen45 halamanSurat Penawaran Beasiswa 2020Adrian PuspawijayaBelum ada peringkat
- SELEKSI AKHIRDokumen7 halamanSELEKSI AKHIRAbdurrahmanBelum ada peringkat
- Peta Okupasi Dan Kkni TikDokumen1 halamanPeta Okupasi Dan Kkni TikWildan Thoyib KBelum ada peringkat
- Makna Ibadah Haji Dan QurbanDokumen14 halamanMakna Ibadah Haji Dan QurbanWildan Thoyib KBelum ada peringkat
- Usulan Peserta BIMTEK 1Dokumen5 halamanUsulan Peserta BIMTEK 1Wildan Thoyib KBelum ada peringkat
- LG Purnomo Sejati PDFDokumen2 halamanLG Purnomo Sejati PDFWildan Thoyib KBelum ada peringkat
- UU No. 11 Tahun 2014 Tentang Keinsinyuran PDFDokumen42 halamanUU No. 11 Tahun 2014 Tentang Keinsinyuran PDFPhiter Van KondoleleBelum ada peringkat
- Bank Indonesia: Peran, Sejarah, dan Struktur OrganisasiDokumen5 halamanBank Indonesia: Peran, Sejarah, dan Struktur Organisasironi123aaaBelum ada peringkat
- New Lowongan Staf Substansi & It 2017-1Dokumen2 halamanNew Lowongan Staf Substansi & It 2017-1Radint Dianto RahmaBelum ada peringkat
- HUKUM TANAHDokumen34 halamanHUKUM TANAHAndri HermawanBelum ada peringkat
- Adendum Tata Kelola TI PDFDokumen1 halamanAdendum Tata Kelola TI PDFWildan Thoyib KBelum ada peringkat
- Klarifikasi Status Studi Doktoral (S3) Bagi Penerima Pendanaan Penelitian Disertasi Doktor PDFDokumen2 halamanKlarifikasi Status Studi Doktoral (S3) Bagi Penerima Pendanaan Penelitian Disertasi Doktor PDFWildan Thoyib KBelum ada peringkat
- Mencegah - Korupsi Melalului e ProcDokumen102 halamanMencegah - Korupsi Melalului e ProcWildan Thoyib KBelum ada peringkat