Bab Ii SSR
Diunggah oleh
Hernanda HernandaJudul Asli
Hak Cipta
Format Tersedia
Bagikan dokumen Ini
Apakah menurut Anda dokumen ini bermanfaat?
Apakah konten ini tidak pantas?
Laporkan Dokumen IniHak Cipta:
Format Tersedia
Bab Ii SSR
Diunggah oleh
Hernanda HernandaHak Cipta:
Format Tersedia
BAB II
SECONDARY SURVEILLANCE RADAR
A. Pendahuluan
Secondary Surveillance Radar (SSR) sama seperti Primary
Surveillance Radar (PSR) menggunakan antenna terarah untuk
mendeteksi posisi target, namun SSR memerlukan partisipasi aktif dari
target untuk mengidentifikasi dan mengetahui posisinya. Target bertugas
menjawab pertanyaan dua pertanyaan yaitu “Siapa kamu ?” dan “Pada
level berapa lokasimu ?”. Hal ini tentunya memerlukan peralatan penerima
(receiver) di pesawat yang berupa decoder dan responder yang disebut
Transponder.
Oleh karena kedua pertanyaan tersebut berbeda, maka interrogator
di pemancar (transmitter) akan memformulasikannya secara terpisah yang
disebut “MODE”. Begitu pula dengan transponder di pesawat akan
membedakannya dan merespon tergantung kode yang diterima dan
selanjutnya receiver di darat akan mendekodekan respon yang dideteksi.
Di dalam fungsinya sebagai alat navigasi udara, SSR akan
memberikan informasi yang akurat kepada pemandu lalu lintas udara
berupa :
1. Jarak (Range) adalah jarak sebuah obyek dari stasiun radar dalam
Nautical Mile (NM).
2. Arah (Azimuth) adalah merupakan sudut dari titik utara ke arah obyek
yang pengukurannya searah dengan arah jarum jam dalam satuan
derajat.
3. Identifikasi (kode) pesawat untuk membedakan pesawat udara yang
satu dengan yang lainnya biasanya dimulai dengan huruf A dan diikuti
dengan empat angka.
4. Ketinggian sebuah pesawat dengan permukaan air laut dengan satuan
ukurannya dalam Feet (Radar Secondary).
5. Pada keadaan darurat, akan terlihat kode khusus yang telah
dimengerti oleh petugas pemandu lalu lintas udara. Kesemua informasi
Monopulse Secondary Surveillance Radar Page II - 1
ini akan didapatkan pada layar pantau radar yang dapat memberikan
informasi di sekeliling antena dengan radius yang sesuai dengan
kemampuan jangkauan pemancar radar.
Informasi jarak didapat dari pengukuran waktu saat sinyal
interrogasi dikirim dari stasiun radar sampai sinyal jawaban diterima oleh
stasiun radar, seperti gambar berikut ini :
t1
t2
Gambar 2.1. Prinsip Kerja SSR
Dengan rumus sederhana berikut dapat dihitung jarak suatu obyek
dari stasiun radar.
c (t 1 +t 2 )
R=
2
Di mana :
R = Jarak
c = Cepat rambat gelombang elektromagnetik di udara
t1 = Waktu yang diperlukan bagi sinyal interogasi dikirim dari stasiun
radar sampai ke obyek
t2 = Waktu yang diperlukan bagi sinyal jawaban dikirim dari obyek
sampai ke stasiun radar
Monopulse Secondary Surveillance Radar Page II - 2
Informasi azimuth didapat dari pengukuran terhadap posisi
antenna yang menerima sinyal jawaban dari antena. Seiring dengan
perputaran radar dibangkitkan dua buah sinyal yang disebut north signal
dan increment signal yang disebut juga dengan Azimuth Reference Pulse
(ARP) dan Azimuth Count Pulse (ACP). Berikut ini penjelasan tentang
kedua sinyal tersebut :
- North signal (ARP) adalah suatu sinyal yang pada prinsipnya akan
dibangkitkan satu kali setiap satu kali putaran antena (360 ) yang
dalam penyetelannya diatur sedemikian rupa agar north signal muncul
tepat pada saat antena radar menghadap arah utara atau nol derajat.
- Increment signal (ACP) adalah sinyal yang dibangkitkan sebanyak
4096 untuk SSR versi lama dan sebanyak 16384 untuk SSR versi
baru, untuk setiap satu putaran antena radar yang selanjutnya akan
dipakai untuk data input pada rangkaian penghitung sudut yang dimulai
dari titik utara. Jadi pada prinsipnya increment dan north signal saling
berkaitan dalam perhitungan azimuth.
Pada SSR yang menghasilkan pulsa increment signal sebanyak
4096 dalam satu putaran antena maka untuk satu pulsa increment signal
akan mewakili 360 ÷ 4096 = 0,08789. Sedangkan pada SSR yang
menghasilkan increment signal 16384 dalam satu putaran antena, maka
untuk satu pulsa increment signal akan mewakili 360 ÷ 16384 = 0,02197.
Sebagai misal untuk arah timur (90) akan diwakili oleh 90 ÷ 0,02197 =
4096 (ACP), seperti gambar berikut ini :
Monopulse Secondary Surveillance Radar Page II - 3
ARP
ACP ke 0
Azimuth 90 (arah utara)
ACP ke 4096
Gambar 2.2. Penentuan Azimuth
Informasi identifikasi (kode pesawat) dan ketinggian di dapat dari
sinyal jawaban yang dikirim oleh pesawat. Sistem deteksi SSR dilakukan
dengan mengirimkan sinyal interogasi ke obyek yang disebut dengan
“Interrogation Mode” dan selanjutnya melalui suatu peralatan yang disebut
transponder akan dijawab oleh obyek tersebut yang disebut dengan
“Reply Code”.
Menurut Annex 10 volume IV frekuensi pembawa (Carrier
Frequency) untuk interrogation mode adalah 1030 MHz, sedangkan
frekuensi pembawa untuk reply code dari adalah 1090 MHz dengan
toleransi 0,2 MHz. Ketentuan-ketentuan tentang interrogation mode dan
reply code secara terperinci dijabarkan dalam Annex 10 volume IV, yaitu
sebagai berikut :
Monopulse Secondary Surveillance Radar Page II - 4
1. Interrogation Mode
Interrogator SSR mengirimkan deretan pulsa ke udara secara
periodik yang disebut “Mode”. Ada beberapa macam mode yang telah
ditetapkan yaitu Mode 1, 2, 3/A, B, D, Mode S dan intermode, di mana
masing-masing mode memiliki kriteria masing-masing, seperti yang
dijelaskan berikut ini :
a. Mode 1, 2, 3/A, B dan D
Pulsa interogasi yang dipancarkan pada Mode 1, 2, 3/A dan B
harus terdiri dari P1 dan P3, serta pulsa kontrol P 2 yang dipancarkan
mengikuti pulsa interrogasi P1 seperti gambar berikut ini :
interrogation P1 P3
control pulse P2
2 µs
8 µs
Gambar 2.3. Bentuk Pulsa Mode 1, 2, 3/A, B dan D
Terlihat bahwa lebar pulsa P 1, P2 dan P3 adalah sama yaitu 0,8 µs ±
0,1 µs. Jarak antara pulsa P 1 - P2 adalah tetap sebesar 2 µs ± 0,15 µs,
sedangkan jarak P1 - P3 adalah berbeda tergantung Mode-nya. Pada tabel
2.1 dapat dilihat jarak P1 - P3 untuk masing-masing mode dan
kegunaannya. Adapun toleransi untuk jarak P1 - P3 adalah ± 0,2 µs.
Tabel 2.1. Jarak P1 – P3
Monopulse Secondary Surveillance Radar Page II - 5
MODE P1 – P3 (µs) KEGUNAAN
1 3 Militer
2 5 Militer
3/A 8 Identifikasi (kode pesawat)
B 17 Tidak digunakan
C 21 Identifikasi (Ketinggian)
D 25 Tidak digunakan
b. Mode S
Berdasarkan Annex 10 volume IV edisi keempat Mode S dapat
digunakan sebagai berikut :
1) Mode S only all call : digunakan untuk mendapatkan jawaban dari
transponder yang menggunakan mode S, sedangkan transponder
yang menggunakan mode A/C tidak akan mengirimkan jawaban.
2) Broadcast : digunakan untuk mengirimkan informasi ke semua
transponder yang menggunakan mode S. Tidak ada sinyal jawaban
yang diterima dari transponder.
3) Selective : untuk pemantauan dan komunikasi dengan transponder
dengan kemampuan hanya Mode S. Untuk masing-masing sinyal
interrogasi, sinyal jawaban akan diterima hanya dari transpoder yang
dialamatkan secara khusus oleh interrogasi.
Pulsa interogasi yang dipancarkan pada Mode S terdiri dari tiga
pulsa yaitu P1, P2 dan P6, serta pulsa control P5 seperti gambar berikut ini :
Monopulse Secondary Surveillance Radar Page II - 6
Gambar 2.4. Bentuk Pulsa Mode S
c. Intermode
Pulsa interogasi yang dipancarkan pada intermode terdiri dari 3
pulsa yaitu P1, P3 dan long P4, serta satu atau dua pulsa kontrol. Seperti
gambar berikut ini :
Gambar 2.5. Bentuk Pulsa Intermode
Untuk sistem yang menggunakan satu pulsa kontrol yang
dipancarkan adalah P1, sedangkan untuk sistem yang menggunakan dua
pulsa kontrol yang dipancarkan adalah P1 dan P2. Jarak antara pulsa P1
dan P2 adalah tetap 2 µs sedangkan jarak pulsa P 1 dan P3 tergantung
mode yang digunakan seperti pada tabel 2.1. Jarak antara pulsa P 3 dan P4
adalah 2 µs sedangkan lebar pulsa P 4 adalah 0,8 µs untuk short P4 dan
1,6 µs untuk long P4.
Kegunaan intermode menurut Annex 10 volume IV edisi keempat
ada dua macam yaitu :
Monopulse Secondary Surveillance Radar Page II - 7
1) Mode A/C/S all-call interrogation digunakan untuk mendapatkan sinyal
jawaban dari transponder yang menggunakan mode A/C dan juga
mode S. Pulsa interogasi yang dipancarkan menggunakan pulsa long
P4.
2) Mode A/C only all-call interrogation digunakan untuk mendapatkan
sinyal jawaban dari transporder yang menggunakan mode A/C.
Sedangkan transponder yang menggunakan mode S tidak akan
mengirimkan sinyal jawaban. Pulsa interogasi yang dipancarkan sama
dengan Mode A/C/S all call namun menggunakan pulsa short P4.
2. Reply Code
Sinyal jawaban yang dipancarkan oleh transponder untuk
membalas sebuah interogasi disebut dengan reply code. Bentuk pulsa
reply code berbeda-beda tergantung mode yang digunakan oleh
transpoder. Berikut ini macam-macam reply code untuk mode yang
berbeda yaitu :
a. Mode 1, 2, 3/A dan C
Pulsa informasi untuk mode 1, 2, 3/A dan C berada di antara kedua
pulsa F1 dan F2 yang disebut sebagai pulse framing dan selalu ada. Pulsa
informasi didesain sebagai A1-A4, B1-B4, C1-C4 dan D1-D4 dengan
jumlah total 12 pulsa. Pulsa yang berada di tengah-tengah yaitu pulsa X
yang tidak selalu digunakan. Pulsa terakhir yaitu Special Position Indicator
(SPI) yang juga kadang-kadang digunakan. Keduabelas pulsa data
tersebut digunakan untuk memberikan permutasi sebanyak 2 12 = 4096
kode data jawaban. Bentuk pulsa reply code dapat dilihat pada gambar
berikut :
F1 C1 A1 C2 A2 C4 A4 X B1 D1 B2 D2 B4 D4 F2 SPI
1.45 µs
0.45 µs
Monopulse Secondary Surveillance Radar Page II - 8
20,3 µs 4.35 µs
Gambar 2.6. Bentuk Pulsa Reply Code Mode 1, 2, 3/A dan C
Letak pulsa informasi pertama (C 1) berada pada jarak 1,45 µs dari
pulsa F1, demikian seterusnya dengan pulsa informasi kedua berjarak 1,45
µs dari pulsa informasi pertama. Berikut ini letak pulsa informasi dari pulsa
F1 yaitu :
Tabel 2.2. Letak Pulsa Informasi
Pulsa Letak (µs) Pulsa Letak (µs)
C1 1,45 B1 11,60
A1 2,90 D1 13,05
C2 4,35 B2 14,50
A2 5,80 D2 15,95
C4 7,25 B4 17,40
A4 8,70 D4 18,85
X 10,15
Dari duabelas pulsa informasi, tidak semua digunakan pada semua
mode, sehingga tidak semua menggunakan 4096 kode Berikut ini
ditunjukan penggunaan pulsa informasi pada masing-masing mode, yaitu :
Tabel 2.3. Jumlah Kode Pulsa Informasi
Mode Jumlah Kode
1 32 kode (Pulsa B4 dan semua pulsa C dan D
tidak digunakan), namun beberapa wewenang
nasional menggunakan 4096 kode
2 4096 kode
3/A 4096 kode
C 2048 kode (Pulsa D1 tidak digunakan)
Monopulse Secondary Surveillance Radar Page II - 9
Mode interogasi yang dasar adalah mode 3/A, merupakan mode
yang dipakai secara umum oleh penerbangan sipil. Mode ini digunakan
untuk mengidentifikasi hal-hal umum seperti nomor identifikasi dari
pesawat yang dibentuk dari nilai pulsa jawaban yang dalam susunan
ABCD, seperti contoh di bawah ini :
F1 C2 A4 B1 D1 B2 D2 F2
Gambar 2.7. Contoh Reply Code Mode 3/A
Pulsa data A = 4, B = 2+1 = 3, C = 2 dan D = 1, yang artinya
identitas pesawat 4323. Dalam jawaban mode 3/A dapat ditambahkan
untuk menjawab pulsa SPI yang berlokasi 4,35 usec setelah pulsa F 2.
Pulsa ini diatur oleh pilot dengan menggunakan saklar pada unit kontrol
transponder. Dengan menekan saklar ini akan mengaktifkan pulsa SPI
sekitar 20 detik dan selama itu semua jawaban untuk penanya dalam
mode 3/A akan ditambahkan pulsanya. Pulsa SPI biasanya ditransmisikan
hanya bila ada permintaan dari ATC, yang digunakan untuk identifikasi
selanjutnya.
Mode C adalah mode kedua yang paling umum digunakan. Mode
ini digunakan untuk menanyakan ketinggian pesawat. Di dalam pesawat
pengukuran ketinggian menggunakan peralatan dengan metode
barometric yang memiliki keakuratan yang baik. Pulsa informasi dipilih
secara otomatis dengan digital analog converter yang dihubungkan ke
pressure altimeter yang memiliki pengaturan normal pada 1013,25 millibar
sebagai reference level.
Pada mode c hanya 11 pulsa yang digunakan dalam mode ini
(pulsa D1 dihilangkan) yang akan menghasilkan permutasi 2 11 = 2048
kode, namun jumlah tersebut cukup untuk mengidentifikasi ketinggian
Monopulse Secondary Surveillance Radar Page II - 10
dengan interval 100 ft dari -1000 ft sampai dengan +121000 ft. Contoh
reply code mode C dapat dilihat pada gambar di bawah ini :
F1 A1 C2 D 4 F2
Gambar 2.8. Contoh Reply Code Mode C
Sistem bilangan gray code digunakan untuk menterjemahkan
setiap perubahan satu level ketinggian ke dalam bilangan biner. Hal ini
dilakukan untuk meminimalisir kesalahan transmisi, karena pada sistem
bilangan gray code memperbolehkan perubahan satu bit data saja setiap
perubahan satu level ketinggian. Pada Annex 10 volume IV dijabarkan
kombinasi pulsa data untuk setiap level ketinggian, seperti tabel berikut.
Tabel 2.4. SSR Automatic Pressure Altitude Transmission Code
Range Pulse Position
Increments
D2 D4 A1 A2 A4 B1 B2 B4 C1 C2 C4
(Feet)
30750 to 30850 0 1 1 0 0 0 0 0 0 0 1
30850 to 30950 0 1 1 0 0 0 0 0 0 1 1
30950 to 31050 0 1 1 0 0 0 0 0 0 1 0
31050 to 31150 0 1 1 0 0 0 0 0 1 1 0
31150 to 31250 0 1 1 0 0 0 0 0 1 0 0
Monopulse Secondary Surveillance Radar Page II - 11
Sehingga contoh reply code mode C pada gambar 2.8, di mana
pulsa A1, C2 dan D4 yang ada (digit 1) menunjukkan ketinggian pesawat
30.950 ft sampai dengan 31.050 ft.
b. Mode S
Bentuk pulsa reply code untuk mode S dapat dilihat pada gambar
berikut ini :
Gambar 2.9. Bentuk Pulsa Reply Code Mode S
Preamble terdiri dari empat pulsa dengan lebar pulsa sebesar
0,5 µs dan jarak masing-masing pulsa dari pulsa pertama yaitu 1 µs untuk
pulsa kedua, 3,5 µs untuk pulsa ketiga dan 4,5 µs untuk pulsa ketiga.
Pulsa data berupa block data yang dimulai 8 µs dari pulsa pertama yang
dipancarkan, terdiri dari 56 atau 112 bit informasi. Lebar setiap bit data
adalah 1 µs, yang dibagi dua untuk menyatakan digit 1 dan 0.
B. Permasalahan Pada SSR
Ada beberapa permasalahan yang terjadi pada SSR yaitu sebagai
berikut :
1. Side Lobe
Antenna SSR menggunakan pola radiasi terarah (directional)
bertujuan agar pancarannya terpusat dan jangkauannya lebih jauh.
Monopulse Secondary Surveillance Radar Page II - 12
Namun antenna dengan pola radiasi directional selain memancarkan main
lobe juga memancarkan side lobe dan back lobe yang tidak diinginkan
seperti gambar berikut ini :
Main lobe
Side lobe
Side lobe
Back lobe
Gambar 2.10. Main Lobe, Side Lobe dan Back Lobe
Oleh karena SSR memiliki gain yang tinggi menyebabkan
transponder yang berada dekat dengan stasiun radar akan dapat terpicu
oleh side lobe. Akibat dari pancaran side lobe dan back lobe yang tidak
dinginkan yaitu transponder menerima pancaran dari side lode atau
jawaban transponder diambil dari side lobe. Kedua hal tersebut berakibat
pada kesalahan pendeteksian posisi pesawat (target palsu) dan yang
terparahnya adalah ring around. Seperti gambar berikut ini :
Monopulse Secondary Surveillance Radar Page II - 13
Side lobe
Jawaban dari
main lobe
Ring Around
Gambar 2.11. Target Palsu
Untuk menghindari efek tersebut maka selain memancarkan pulsa
interogasi, dipancarkan pula pulsa kontrol namun melalui antenna yang
berbeda. Pulsa interogasi dipancarkan melalui antenna dengan pola
radiasi directional yang disebut dengan ∑ channel, sedangkan pulsa
kontrol dipancarkan melalui antenna yang memiliki pola radiasi
omnidirectional yang disebut dengan ∆ channel. Namun dalam
perkembangannya dari SSR menjadi Monopulse SSR (MSSR), sebutan
untuk ∆ channel berubah menjadi Ω channel.
Monopulse Secondary Surveillance Radar Page II - 14
A
∑ channel
Ω channel
Gambar 2.12. Sum Channel dan Omni Channel
Proses pemancaran Ω channel untuk mengatasi efek side lobe
disebut dengan Side Lobe Suppresion (SLS). Pada dasarnya proses SLS
tidak untuk menghilangkan pancaran side lobe namun dengan
perbandingan level amplitudo ∑ channel dengan Ω channel yang
digunakan untuk mengetahui apakah pesawat berada pada main lobe
atau side lobe. Apabila amplitudo ∑ channel > Ω channel maka pesawat
berada pada main lobe (posisi A), namun apabila ∑ channel ≤ Ω channel
maka pesawat berada pada side lobe (posisi B). Proses SLS ada dua
macam yaitu :
a. Interrogator Side Lobe Supression (ISLS)
ISLS adalah proses SLS yang dilakukan pada saat interogasi. ISLS
digunakan untuk mencegah transponder mejawab apabila pulsa interogasi
berasal dari side lobe, yang dilakukan dengan cara membandingkan
amplitude dari Ω channel (P2) dengan ∑ channel (P1).
Karakteristik pancaran pulsa interogasi dan kontrol berdasarkan
annex 10 volume IV dapat diartikan sebagai berikut “Amplitudo dari P 2
Monopulse Secondary Surveillance Radar Page II - 15
yang terradiasikan pada antena transponder harus sama atau lebih besar
dari amplitudo P1 dari pancaran side lobe dan pada level 9 dB lebih
rendah di bawah amplitudo P 1 dari pancaran main lobe”. Seperti gambar
berikut ini :
dB
9 dB
P2 < P1 – 9 dB
Time
P1 P2
Gambar 2.13. Perbandingan Amplitudo P1 dan P2
Perbandingan level amplitudo antara P1 dan P2 tersebut dapat
dijelaskan sebagai berikut :
- Apabila amplitudo dari P1 lebih besar dari P2 (P2 < P1 - 9 dB), yang
artinya pesawat berada pada main lobe dan transponder boleh
merespon. Transponder akan menunggu P3 dan selanjutnya
merespon.
- Apabila amplitudo dari P1 sama dengan P2, yang artinya pesawat
berada pada side lobe dan transponder tidak boleh merespon.
b. Receiver Side Lobe Supression (RSLS)
RSLS adalah proses SLS yang dilakukan pada saat proses
penerimaan sinyal jawaban di stasiun radar. RSLS digunakan untuk
mencegah adanya sinyal jawaban dari pesawat yang berada di dekat
stasiun radar yang diterima melalui side lobe.
Monopulse Secondary Surveillance Radar Page II - 16
Amplitudo dari ∑ channel dan Ω channel yang diterima oleh
antenna di stasiun radar dibandingkan. Apabila amplitudo dari Ω channel
lebih besar atau sama dengan amplitudo ∑ channel yang artinya sinyal
jawaban yang diterima berasal dari side lobe maka sinyal jawaban
tersebut tidak akan diproses. Seperti gambar berikut ini :
F1 F2
Ω>∑
Gambar 2.14. Perbandingan Amplitudo Ω channel dengan ∑ channel
2. False Replies Unsynchonized to Interrogator Transmission (FRUIT)
FRUIT adalah permasalahan SSR yang terjadi seiring dengan
meningkatnya pergerakan lalu lintas udara, di mana ada kemungkinan
beberapa interrogator berada berdekatan satu sama lain. Pada suatu saat
terjadi satu transponder diaktifkan oleh lebih dari satu interrogator. Seperti
gambar berikut ini :
Interrogation 1
Reply 1
Reply 2
Reply 1
Reply 2 Interrogation 2
Gambar 2.15. Proses Terjadi FRUIT
Monopulse Secondary Surveillance Radar Page II - 17
Bagi interrogator yang menerima jawaban yang sesuai dengan
sinyal interogasinya (Synchronous Reply) maka tampilan di layar radar
akan jelas, namun bagi interrogator yang menerima jawaban yang tidak
sesuai dengan sinyal interogasinya (Unsynchronous Reply) akan
menimbulkan bintik yang acak-acakan seperti gambar berikut ini :
Gambar 2.16. FRUIT
Untuk mengatasi hal tersebut digunakan alat yang Defruiter. Prinsip
kerjanya alat tersebut adalah dengan sistem penundaan (delay). Pada
saat antena menyapu suatu target, transponder akan mengirimkan 10
sampai dengan 30 jawaban, di mana jawaban yang pertama disimpan dan
ditunda terlebih dahulu, kemudian dibandingkan dengan jawaban
selanjutnya yang diterima. Seperti gambar berikut ini :
Monopulse Secondary Surveillance Radar Page II - 18
Video dan Fruit
Video yang ditunda
Video tanpa Fruit
Gambar 2.17. Defruiter
3. Garble
Garble adalah permasalahan yang terjadi saat jumlah pergerakan
pesawat semakin padat, di mana ada kemungkinan terjadi dua pesawat
berada pada jarak yang berdekatan.
Reply 1
Reply 2
Gambar 2.18. Proses Terjadi Garbling
Posisi pesawat yang berdekatan dapat menyebabkan terjadinya
overlaping jawaban antara transponder satu dengan yang lainnya, yang
menyebabkan terjadinya kesalahan pembacaan informasi yang ada pada
jawaban tersebut. Pada gambar 2.19 merupakan contoh di mana pada
saat jawaban pesawat pertama belum selesai diterima sudah datang
jawaban dari pesawat kedua, sehingga terjadi overlaping. Jawaban
pesawat pertama misalnya dalam mode A berisikan informasi kode
Monopulse Secondary Surveillance Radar Page II - 19
pesawat yaitu 5236, sedangkan jawaban pesawat kedua berisikan
informasi 4130. Namun karena overlaping yang terbaca antara F 1 dan F2
adalah 5376.
Gambar 2.19. Overlapping
Permasalahan garble merupakan salah satu penyebab perlunya
pembatasan separasi minimal antar pesawat. Untuk separasi radial agar
tidak terjadi overlaping ditentukan oleh panjang dari reply code yaitu
20,3 µs atau sekitar 3,05 km. Jika pulsa SPI dipergunakan maka 24,65 µs
atau sekitar 3,7 km. Sedangkan untuk separasi lateral tergantung lebar
beam antena dan jarak.
4. Multipath
SSR sering diletakkan pada daerah di mana terdapat bangunan
dengan permukaan yang dapat memantulkan sinyal interogasi dari
interrogator ataupun jawaban dari transponder. Seperti misalnya hanggar,
bangunan terminal dan obyek lainnya yang dikelilingi oleh baja (metal).
Pada gambar 2.20 adalah contoh pemantulan sinyal jawaban.
Pesawat menerima sinyal interogasi dari stasiun radar dan mengirimkan
jawaban ke segala arah. Sinyal jawaban yang diterima oleh main lobe
akan menghasilkan informasi yang tepat. Namun ada kemungkinan sinyal
jawaban yang terkirim mengenai suatu permukaan dan memantulkan
Monopulse Secondary Surveillance Radar Page II - 20
kembali ke stasiun radar dan diterima melalui side lobe. Apabila jawaban
yang diterima dari proses pemantulan berhasil diproses akan
menghasilkan pengukuran jarak dan azimuth yang salah. Namun dengan
adanya peralatan RSLS, permasalahan tersebut dapat terpecahkan.
Reflection
Surface
Gambar 2.20. Pemantulan Jawaban
Pada gambar 2.21 adalah contoh pemantulan sinyal interogasi.
Pesawat menerima dua sinyal interogasi, yang pertama adalah sinyal
interogasi dari side lobe. Hal ini dapat diselesaikan dengan menggunakan
sistem ISLS di mana pesawat tidak akan merespon apabila mendapat
interogasi dari side lobe. Sinyal interogasi yang kedua berasal dari
pantulan sinyal interogasi yang berasal dari main lobe, sehingga
amplitude P1 akan lebih besar dari P2 dan peralatan yang menggunakan
sistem ISLS tidak akan mengatasi permasalahan tersebut.
Monopulse Secondary Surveillance Radar Page II - 21
Reflection
Surface
Gambar 2.21. Pemantulan Interogasi
Seiring dengan perkembangan teknologi, untuk mengatasi
permasalahan pemantulan sinyal tersebut digunakan sistem yang dikenal
dengan Improved Interrogator Side lobe Supression (IISLS). Pada proses
ISLS dipancarkan pulsa kontrol P 2, tapi pada proses IISLS dipancarkan
pasangan pulsa P1 dan P2 dengan amplitudo yang sama sebagai pulsa
kontrol, seperti gambar 2.22. Hal ini menyebabkan pada saat pesawat
menerima pulsa P2 yang amplitudonya sama dengan P1 maka pesawat
tidak akan merespon selama rentang waktu tertentu maksimal 45 µs.
Monopulse Secondary Surveillance Radar Page II - 22
interrogation P1 P3
control pulse P1 P2
interrogation P1 P3
Gambar 2.22. Pulsa Kontrol pada IISLS
controlSemua P2 terjangkau oleh control beam dan di luar
pulse pesawat yang
main beam tidak akan menjawab, sehingga mengurangi transponder
availability.
5. Cone of silence
Permasalahan cone of silence yang terjadi akibat sudut belakang
pancaran antena radar lebih kecil dari 90 adalah cone of silence.
Pesawat yang berada pada wilayah cone of silence tidak akan terdeteksi
karena tidak mendapat sinyal interogasi dari radar. Seperti gambar berikut
ini :
Gambar 2.23. Cone of Silence
Secara ideal pancaran antena radar jika dipandang secara
horisontal berbentuk pencil beam, namun sampai saat ini pancaran
antena radar seperti gambar berikut.
Monopulse Secondary Surveillance Radar Page II - 23
Gambar 2.24. Horisontal Plane
Begitu pula jika dipandang secara vertikal, pancaran antena radar
berbentuk persegi panjang di mana sudut belakang pancaran antena
adalah 90, namun sampai saat ini belum terwujud. Sehingga jika diputar
360 akan membentuk cone of silence. Untuk mengurangi cone of silence
maka ditambahkan komponen yang disebut tilt antenna, yan digunakan
untuk mengatur arah pancaran antena secara vertikal.
Gambar 2.25. Vertical Plane
C. Sistem SSR
Secara umum sistem peralatan SSR dapat dilihat pada gambar
berikut :
Monopulse Secondary Surveillance Radar Page II - 24
1030 MHz 1090 MHz
ANTENNA
“Interrogation” track
“control” track
P1 P3
P2
P’2
Command
SWITCHING BOX
Rotating Joint
circulator
1030 MHz 1090 MHz
P1 P2 P3
CODING TRANSMITTER RECEIVER
1030 MHz
Raw video
Outside synchroniser
DEFRUITER
P1 P3 synchro
DECODER
Decoded video
SIMBOL
GENERATOR
Symbols
Gambar 2.26. Blok Diagram SSR
Monopulse Secondary Surveillance Radar Page II - 25
Sistem kerja peralatan SSR dimulai dari origin synchonizer (So)
yang diberikan ke CODING, yang digunakan sebagai sinkronisasi untuk
menghasilkan deretan pulsa P1, P2 dan P3 tergantung pengaturan
interlacing dari interrogation mode. Pada proses transmisi pulsa P 1, P2 dan
P3 dimodulasikan pada gelombang pembawa 1030 MHz, yang selanjutnya
diteruskan ke circulator.
Circulator berfungsi sebagai band pass filter yang akan melewatkan
1030 MHz dari TRANSMITTER ke antena pada saat proses transmisi dan
melewatkan 1090 MHz dari antena ke RECEIVER pada saat proses
penerimaan. Rotating Joint berfungsi untuk mengatur perputaran antena.
SWITCHING BOX pada saat transmisi diatur oleh P’2 untuk
mengatur sinyal kontrol P2 dikirimkan melalui antena yang terpisah dari
sinyal interogasi P1 dan P3. Sinyal interogasi P1 dan P3 serta sinyal
jawaban dari transponder dikirimkan langsung melalui antena terarah.
Pada proses penerimaan, sinyal yang diterima dari antena akan
difilter, dikuatkan dan dideteksi informasi di dalamnya. Cara sederhana
untuk memfilter adalah dengan membandingkan sinyal 1090 MHz dari
antena dengan 1030 MHz dari interrogator untuk mendapatkan selisih 60
MHz yang disebut Raw Video. Selanjutnya diteruskan ke DECODING
untuk dideteksi informasi yang ada di dalam framing pulse (F 1 dan F2).
Brerikut ini akan dijelaskan lebih lanjut tentang blok diagram di
dalam transmitter maupun receiver yaitu sebagai berikut :
1. Transmitter
Prinsip kerja dari transmitter SSR dapat dilihat pada gambar 2.26.
Pembangkitan triger SSR (So) dapat bersifat internal apabila stasiun SSR
berdiri sendiri atau bersifat eksternal apabila stasiun SSR digabung
dengan stasiun PSR untuk proses sinkronisasi perputaran antenanya.
Encoder berfungsi untuk membangkitkan 3 deretan pulsa P1, P2 dan P3
yang ditrigger oleh So. Jarak pulsa P1 dan P2 adalah tetap 2 µs,
sedangkan jarak P1 dan P3 tergantung interrogation mode yang akan
dipancarkan.
Monopulse Secondary Surveillance Radar Page II - 26
GENERATION OF SWITCHING PULSE P’2
P1, P2 P’2
∑
SECONDARY
Trigger RADAR TRIGGER GENERATION
Secondary
ENCODER SWITCH
∆
Radar Trigger
1030 MHz OSCILLATOR MODULATOR
Gambar 2.27. Blok Diagram Transmitter
Oscillator berfungsi membangkitkan sinyal dengan frekuensi 1030
MHz, yang kemudian dimodulasikan oleh Modulator dengan deretan pulsa
dari Encoder yang menghasilkan interrupted carrier signal seperti gambar
berikut :
P1 P2 P3
Interogation
pulse
carrier
Interrupt carrier
Gambar 2.28. Interrupted Carrier Signal
Monopulse Secondary Surveillance Radar Page II - 27
Encoder juga mengirimkan pulsa P 1 dan P2 untuk menghasilkan P’2
yang lebarnya dimulai dari trailing edge P 1 sampai minimal trailing edge P2
(2,8 µs) seperti gambar berikut ini :
P1 P2 P3
P’2
Gambar 2.29. Pulsa P’2
Pulsa P’2 berfungsi untuk mengatur Switch yang akan melewatkan
P1, P3 ke ∑ channel dan P2 ke ∆ channel. Pada saat pulsa P’ 2 belum
dibangkitkan maka Switch akan melewatkan output dari modulator ke ∑
channel, namun pada saat pulsa P’ 2 telah dibangkitkan, switch akan
melewatkan output dari modulator ke ∆ channel.
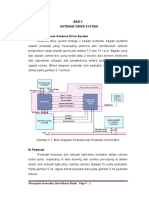
2. Receiver
Prinsip kerja dari Receiver SSR dapat dilihat pada gambar 2.29.
Pada sistem SSR yang tidak menggunakan RSLS hanya memiliki satu
receiver untuk menerima sinyal jawaban dari ∑ channel, namun pada
sistem SSR yang menggunakan RSLS memiliki dua receiver untuk
menerima sinyal jawaban dari ∑ channel dan ∆ channel.
Dalam kedua receiver tersebut, sinyal jawaban 1090 MHz dari
transponder digabungkan dengan 1030 MHz dari interrogator untuk
menghasilkan raw video 60 MHz. Bagi sistem SSR yang tidak
menggunakan RSLS, raw video untuk ∑ channel langsung diteruskan ke
video generation untuk pemrosesan sinyal informasi. Namun bagi sistem
SSR yang menggunakan RSLS, raw video untuk ∑ channel dan ∆ channel
diteruskan ke sistem RSLS, untuk dibandingkan.
Monopulse Secondary Surveillance Radar Page II - 28
1030 MHz
Logic Video
VIDEO GENERATION ∑ CHANNEL RECEPTION ∑
Analog Video ∑ Video
1030 MHz
From the Antenna
RSLS PROCESSING ∆ CHANNEL RECEPTION ∆
∆ Video
Gambar 2.30. Blok Diagram Receiver
Jika amplitudo ∑ channel lebih kecil atau sama dengan ∆ channel
maka sinyal jawaban tersebut tidak akan diproses. Jika amplitudo ∑
channel lebih besar dari ∆ channel maka sinyal jawaban dari ∑ channel
diteruskan ke video generation.
3. Extractor Video
Extractor video dalam sistem kerjanya dirancang dengan
menggunakan beberapa teknik logika untuk memproses semua data-data
yang dihasilkan oleh SSR. Dalam sistem kerjanya dipisahkan menjadi dua
bagian yaitu bagian S (Secondary) dan bagian T (Transmission). Proses
keseluruhan extractor video dapat dilihat pada gambar berikut ini :
Monopulse Secondary Surveillance Radar Page II - 29
Section “S”
Secondary video
Secondary video analysis
SSR signal presence Yes
Secondary signal
No
Does signal Yes
appear over several periode ?
No Is azimuth Yes
detection
Reject correct?
Code Recognition
No
Reject
Mode
Is code
Yes
validated over several periode ?
Secondary radar sync Code
No
Mode Decoding
Reject Generation of secondary plot
Correction
Range and azimuth calculation
North signal Azimuth Range
Mode
Generation of secondary plot
Azimuth
Comparison of output memory
Section “T”
Buffer Register
Clock Transmission
Coordinate conversion (polar – cartesian) Data formatting To modem
Data
Gambar 2.31. Extractor Video
Monopulse Secondary Surveillance Radar Page II - 30
Bagian S bekerja sedemikian rupa dengan mengambil atau
menggunakan perhitungan waktu yang sebenarnya dalam proses
merubah dan menganalisa suatu bentuk raw signal yang mempunyai sifat-
sifat tertentu ke dalam bentuk-bentuk digital, sehingga dapat diperiksa
kebenaran dan kualitasnya. Dan juga untuk memperhitungkan posisi dari
suatu pesawat udara. Semua data yang dipilih disebut “Radar Plot” dan
selanjutnya dikirim dan digunakan pada bagian T untuk kepentingan
extractor sendiri. Bagian T berfungsi untuk memproses bagaimana suatu
Radar Plot tersebut dimanfaatkan dan dikirim ke unit Air Traffic Control
Display.Fungsi lain dari bagian ini adalah untuk memperoleh bentuk
koordinat cartesian (x, y) ke dalam bentuk koordinat polar (r, ). Proses
pada masing-masing bagian yaitu sebagai berikut :
a. Bagian S
Pada bagian S, ada dua sistem kerja yang dihasilkan yaitu plane
processing dan code processing. Pada plane processing akan bekerja
bagaimana menghitung posisi dari suatu sinyal pantulan (echo),
sedangkan code processing akan menterjemahkan jawaban yang dikirm
oleh peralatan transponder di pesawat.
1) Plane Processing
Pada plane processing, dilakukan pemeriksaan terhadap
keberadaan suatu echo pada kurun waktu dan jarak tertentu (quantum
range) di dalam suatu jendela yang bergeser (sliding window) searah
jarum jam, dengan lebar sebanyak 7 periode, yang dapat diatur
persyaratannya secara terprogram antar 2/7 dan 3/7 pada pengoperasian
normal. Artinya bila didapatkan pendeteksian minimum sama atau lebih
besar dari persyaratan yang telah ditentukan maka echo yang diterima
dianggap benar, namun bila pendeteksiannya kurang dari persyaratan
tersebut maka echo dianggap salah/palsu dan otomatis dihilangkan.
Sliding window dan quantum range dapat dilihat pada gambar berikut :
Monopulse Secondary Surveillance Radar Page II - 31
Range quantum
P1
P2
Echo Signal ss
mi t
targe
P3 ume
Pres echo
P4 Pa
P5
Sh
ift
P6
W
Azimuth
ind
ow
Radar
Gambar 2.32. Quantum Range
Untuk diketahui bahwa setiap sistem radar memancarkan energi ke
udara secara horizontal membentuk lebar sudut sapuan yang disebut
beam sweep, di mana beam sweep tersebut terdiri dari beberapa periode
pancaran, yang setiap kali periode pancaran bila mengenai sasaran akan
mengirimkan kembali sebuah pantulan. Apabila setiap periode pantulan
dengan pantulan berikutnya saling berhubungan dan beraturan dalam
suatu jarak quantumnya, maka pantulan tersebut disimpulkan sebagai
pantulan yang nyata. Tapi sebaliknya apabila pantulan tersebut tidak
berhubungan dan beraturan maka disimpulkan pantulan tersebut salah.
Selanjutnya dilakukan proses pengukuran azimuth, di mana data
diperoleh dari encoder antena dengan menggunakan hitungan binari yang
dimulai dari north signal diputar searah jarum jam sehingga membentuk
increment signal, seperti gambar berikut ini :
Monopulse Secondary Surveillance Radar Page II - 32
CORRECTION BIAS
SN
(North signal)
AZIMUTH EXTENT
AZIMUTH AT THE END
OF DETECTION
CENTER AZIMUTH =
TRANSMITTED AZIMUTH
AZIMUTH AT THE START
OF DETECTION
2
Gambar 2.33. Pengukuran Azimuth
Untuk mendapatkan posisi azimuth dari suatu target antena
mencatat setiap periode sampai dengan akhir penangkapan dari suatu
plot, kemudian dikurangi dengan setengah lebar azimuth plto, untuk
mendapat titik tengah dan dikurangi lagi dengan harga konstanta, yang
dipakai untuk mendapat prasangka yang benar akibat kesalahan yang
berhubungan dengan pemrosesan. Pengukuran azimuth menggunakan
rumus sebagai berikut :
θT =θFE− ( ∆2θ + Kc )
Di mana :
T = transmitted plot azimuth
FE = echo azimuth
∆ = azimuth extent
Kc = bias correction akibat proses korelasi
Pengukuran jarak dilakukan dengan menggunakan patokan internal
clock yang dihasilkan oleh peralatan extractor yang dipicu dari radar
synchonization. Clock tersebut dibagi dalam quanta yang digunakan
Monopulse Secondary Surveillance Radar Page II - 33
sebagai memory address setiap quantum dan data yang ditangkap akan
ditulis oleh memory sebagai posisi jarak.
2) Code Processing
Code processing berfungsi untuk menguji coba kode-kode yang
diterima apakah valid atau tidak dan berfungsi untuk menghilangkan kode-
kode yang tidak tentu akibat kesalahan yang disebabkan oleh gangguan
atau kode-kode yang cacat. Hal ini dilakukan dengan melakukan
pengecekan interval antar kode-kode yang diterima apakah memiliki
interval 1,45 µs atau tidak. Selanjutnya dilakukan pengecekan pula jarak
antara pulsa pertama yang diterima dengan pulsa yang terakhir diterima
apakah berjarak 20,3 µs atau tidak.
Setelah pengecekan interval selesai dan kode yang diterima
dianggap valid, maka dilakukan code formatting, di mana pulsa F 2 telah
dihapus. Papa pemrosesan kode dilakukan pula code validation di mana
membandingkanan antara kode dari repetition periode pertama dengan
kode yang diterima dari repetition kode kedua, untuk mendapatkan kode
yang valid, seperti gambar berikut ini :
F1 d C1 A1 C2 A2 C4 A4 x D1 B1 D2 B2 D4 B4 IP
1st repetition period
Comparision
F1 d C1 A1 C2 A2 C4 A4 x D1 B1 D2 B2 D4 B4 IP
2nd repetition period
Gambar 2.34. Code Validation
Monopulse Secondary Surveillance Radar Page II - 34
Sinyal P1 dan P3 dikirimkan juga ke extractor di mana sinyal P 3
digunakan sebagai sinkronisasi kerja extractor. Jarak antara P 1 dan P3
digunakan untuk menterjemahkan mode yang digunakan.
b. Bagian T
Fungsi bagian T adalah untuk menyerahkan plot dan berita yang
memenuhi syarat dan siap untuk dikirim melalui jalur telpon dengan
memanfaatkan fungsi MODEM. Ada empat sub fungsi pada bagian ini :
- Sebagai adaptor dalam kecepatan pengiriman, yang dilengkapi dengan
interface penyimpanan
- Sebagai penyesuai koordinat yang telah dikoreksi sebelumnya dan
kelengkapan lainnya yang diprogram dalam bentuk polar
- Bentuk keluaran berita yang dilengkapi dengan ukuran sususan yang
dapat mengirim berita secara serial
- Pengiriman berita dapat menggunakan external clocks yang datangnya
dari modem atau menggunakan internal clocks
Monopulse Secondary Surveillance Radar Page II - 35
Anda mungkin juga menyukai
- Analisa Kekuatan Konstruksi Suspensi Bogie NT 11 K5 Pada Gerbong Kereta Api PDFDokumen15 halamanAnalisa Kekuatan Konstruksi Suspensi Bogie NT 11 K5 Pada Gerbong Kereta Api PDFIndra BzBelum ada peringkat
- Budaya Keamanan (Security Culture)Dokumen46 halamanBudaya Keamanan (Security Culture)Hernanda HernandaBelum ada peringkat
- Pm. No. 17 Tahun 2011 PDFDokumen31 halamanPm. No. 17 Tahun 2011 PDFyurarizaldiBelum ada peringkat
- Peraturan Menteri Perhubungan Nomor 15 Tahun 2011Dokumen40 halamanPeraturan Menteri Perhubungan Nomor 15 Tahun 2011Hernanda HernandaBelum ada peringkat
- Percobaan l2f008013 MtaDokumen6 halamanPercobaan l2f008013 MtaHernanda HernandaBelum ada peringkat
- Rangkuman Sistem Teknik KebandarudaraanDokumen30 halamanRangkuman Sistem Teknik KebandarudaraanHernanda HernandaBelum ada peringkat
- Bab Viii Sistem MonitoringDokumen69 halamanBab Viii Sistem MonitoringHernanda HernandaBelum ada peringkat
- Bab Vii Visual RadarDokumen25 halamanBab Vii Visual RadarHernanda HernandaBelum ada peringkat
- Arduino PengenalanDokumen24 halamanArduino PengenalanAsep Widodo50% (2)
- Bab V Antena Drive SystemDokumen39 halamanBab V Antena Drive SystemHernanda HernandaBelum ada peringkat
- Bab Vi AntennaDokumen21 halamanBab Vi AntennaHernanda HernandaBelum ada peringkat
- Bab Iv Interrogator SystemDokumen43 halamanBab Iv Interrogator SystemHernanda HernandaBelum ada peringkat
- Bab Iii Mode S MSSRDokumen8 halamanBab Iii Mode S MSSRHernanda HernandaBelum ada peringkat
- Bab I PendahuluanDokumen13 halamanBab I Pendahuluanyaf17Belum ada peringkat
- Arduino PengenalanDokumen24 halamanArduino PengenalanAsep Widodo50% (2)