Bab Iv Interrogator System
Diunggah oleh
Hernanda HernandaJudul Asli
Hak Cipta
Format Tersedia
Bagikan dokumen Ini
Apakah menurut Anda dokumen ini bermanfaat?
Apakah konten ini tidak pantas?
Laporkan Dokumen IniHak Cipta:
Format Tersedia
Bab Iv Interrogator System
Diunggah oleh
Hernanda HernandaHak Cipta:
Format Tersedia
BAB IV
INTERROGATOR SYSTEM
A. Deskripsi Umum
Sistem Mode-S MSSR terdiri dari dua channel yang berfungsi
sebagai main dan standby. Setiap channel memiliki Interrogator system
seperti gambar berikut ini :
Gambar 4.1. Interrogator System
Pada gambar tersebut dapat dilihat bahwa Interrogator System
terdiri dari beberapa subsystem yaitu :
1. Mode s transmitter yang terdiri dari :
a. EMU (Exciter Modulator Unit)
b. SDU (Sum Driver Unit)
c. SAU (Sum Amplifier Unit)
d. CTU (Control Transmitter Unit)
2. Transmitter – Receiver Antenna Interface Unit ( TRA )
Monopulse Secondary Surevillance Radar Page IV - 1
3. Transmitter Power Supply module ( TPS )
4. Transmitter Fans Unit ( TFU )
5. Multi Channel Receiver Unit ( MRU )
6. Mode S Power Supply Extractor Unit ( MFEX )
7. Mode S Extractor Fans Unit ( MVEX )
8. Mode S Extractor ( MEX )
Setiap channel terhubung dengan satu port di RF Switching Unit
yang menghubungkan main channel ke antenna dan stand-by channel ke
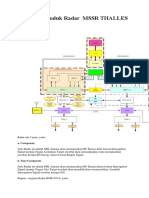
dummy load. Blok diagram keseluruhan dari sistem radar Indra dapat
dilihat pada gambar 4.2. Penjelasan blok diagram tersebut dibagi menjadi
proses pemancar, proses penerima dan proses extractor, yaitu sebagai
berikut :
1. Proses Pemancar
Mode S Transmitter menerima sinyal dari data extractor untuk
dimodulasikan, dikuatkan dan menghasilkan sinyal interogasi untuk SUM
channel (P1, P2, P3, P4 dan P6) dan untuk OMNI channel (P1, P2 dan
P5), tergantung mode interogasinya. Transmitter memungkinkan
bermacam-macam jenis interlacing untuk mode yang dipilih (1, 2, 3/A, B,
C, D, Intermodes dan S).
Output power maksimum adalah 65 dbm untuk kedua channel
(SUM dan OMNI), yang dibagi menjadi 7 level dan setiap level memiliki
perbedaan power output 2 db. Power maksimum 65 dbm merupakan level
7, sedangkan level 6 = 63 dbm, level 5 = 61 dbm, level 4 = 59 dbm, level 3
= 57 dbm, level 2 = 55 dbm dan level 1 = 51 dbm.
Pemilihan interrogation mode, interlacing, power output dan
parameter transmitter lainnya seperti PRF, interrogation period, azimuth
sector dan sebagainya diatur melalui sistem monitoring dan control (SLG
untuk lokal dan SRG untuk remote).
Sinyal RF SUM dan OMNI dari channel dalam kondisi main melalui
TRA dihubungkan ke RF Switch (RRF), yang selanjutnya meneruskan ke
antenna melalui pedestal untuk menginterogasi pesawat.
Monopulse Secondary Surevillance Radar Page IV - 2
Gambar 4.2. Blok Diagram Radar Dual Channel
Monopulse Secondary Surevillance Radar Page IV - 3
2. Proses Penerima
Sinyal reply dari transponder diterima secara simultan oleh tiga
antenna pattern yaitu SUM, OMNI dan DIFF. Sinyal ini oleh pedestal
diteruskan ke main channel oleh RRF dan TRA. Penerimaan secara
simultan SUM dan DIFF channel digunakan untuk mengkoreksi azimuth
target dalam sistem monopulse. Penerimaan SUMM dan OMNI channel
digunakan untuk Receiver Side Lobe Suppresion (RSLS).
Multichannel Receiver Unit (MRU) menghasilkan output empat
sinyal video yaitu SUM, DIFF, OMNI dan Monopulse Video. Keempat
sinyal video tersebut diteruskan ke data extractor (MEX) dan dikirimkan
juga ke MRU channel yang berada dalam kondiri stand-by.
Oleh modul extractor sinyal video tersebut diproses untuk
mendapatkan informasi data radar yang selanjutnya dikirim ke sistem
manajemen dan kontrol (SLG dan SRG) dan sistem graphic.
3. Proses Extractor
Modul exctractor tidak hanya beroperasi pada saat penerimaan
namun juga pada saat proses transmisi. Secara rinci modul extractor
memiliki fungsi utama sebagai berikut :
- Menghasilkan sinyal modulasi untuk transmitter
- Menerima dan memproses sinyal video dari MRU
- Mendeteksi sinyal reply SSR dan Mode S
- Membentuk plot semua pesawat
- Mengirimkan output plot dalam format ASTERIX ke sistem
managemen dan control, ke sistem graphic dan ke ATC center.
Dalam melaksanakan fungsi utama tersebut modul extractor dibagi
ke dalam tiga blok processing utama yaitu :
a. Video processor
b. Real Time Channel Controller yang terdiri dari :
- Interrogator Scheduler
- SSR dan Mode S Reply Processor
Monopulse Secondary Surevillance Radar Page IV - 4
c. Link Control yang terdiri dari :
- Plot Assignor Fuction
- Link Management Process
- Roll-Call List
Extractor juga menerima sinyal BITE (Built in Test Equipment) dari
subsystem lainnya. Informasi yang diperoleh dari BITE adalah informasi
alarm yang selanjutnya ditampilkan dalam sistem manajemen dan control.
Modul extractor (MEX) terdiri dari tiga board yaitu : MICA 02, MICA 03 dan
satu board yang terdiri dari TDLS, TCPD dan TCPU.
B. Transmitter Unit
Transmitter unit terdiri dari beberapa subsystem yaitu EMU, SAU,
SDU dan CTU. Tata letak subsystem tersebut dalam rak dapat dilihat
pada gambar 4.3a, dan blok diagram transmitter unit dapat dilihat pada
gambar 4.3b berikut.
(a) Tata Letak Transmitter Unit
Monopulse Secondary Surevillance Radar Page IV - 5
(b) Blok Diagram Transmitter Unit
Gambar 4.3. Trasnsmitter Unit
Mode S Transmitter adalah dual solid state transmitter, satu untuk
bagian SUM dan yang lainnya untuk bagian OMNI. Mode S Transmitter
menerima sinyal pemodulasi yang sesuai dari extractor untuk
dimodulasikan denga sinyal carrier 1030 MHz, dikuatkan dan dipancarnya
dalam bentuk Radio Frequency (RF) sebagai sinyal interogasi. Berikut ini
interrogasi yang dihasilkan oleh masing-masing channel :
1. SUM channel
- P1, P3, P4 untuk Mode A, C dan Intermode
- P1, P2, P6 untuk Mode S
2. OMNI channel
- P2/ P1 dan P2 untuk fungsi ISLS/IISLS dalam interogasi SSR
- P5 untuk fungsi interogasi Mode S All Call dan Selective
Extractor (MICA 03) mengirimkan tiga jenis sinyal pemodulasi yaitu
Amplitude, Phase dan Ω Amplitude. Sinyal pemodulasi Amplitude
merepresentasikan pulsa-pulsa interogasi yang akan dipancarkan melalui
SUM channel dan dimodulasikan secara AM (P1, P3, P4), sedangkan
Phase merepresentasikan pulsa-pulsa interogasi yang akan dipancarkan
melalui SUM channel dan dimodulasikan secara DPSK (P6). Untuk Ω
Amplitude merepresentasikan pulsa-pulsa interogasi yang akan
Monopulse Secondary Surevillance Radar Page IV - 6
dipancarkan melalui OMNI channel dan dimodulasikan secara AM (P1,
P2, P5).
Transmitter Mode S memungkinkan setiap jenis interlacing antara
mode yang dipilih (1, 2, 3/A, B, C, D dan Mode S) dan interogasi
intermode dengan periooe yang sesuai. Interlacing mode diprogram oleh
sektor azimuth, termasuk non-interogasi sektor. Urutan interlacing
sepenuhnya diatur oleh extractor. Pemancar juga memiliki tujuh level
power output yang juga bisa diatur sektorisasinya. Dimungkinkan pula
untuk memprogram sektor azimuth di mana pemancaran sinyal interogasi
dinonaktifkan (Blanking Sector).
Pemilihan output power untuk mode 1, 2, 3/A, B, C dan D dapat
dilakukan untuk pemilihan secara konstan pada sektor azimuth yang telah
diprogram untuk tujuh level power yang disediakan. Penentuan sektorisasi
dilakukan di SLG/SRG yang selanjutnya diproses oleh MEX.
Pemilihan output power untuk Mode S Selective Interrogation
dilakukan secara otomatis oleh MEX untuk menjangkau jarak target
dengan menggunakan tabel dari batas jarak untuk setiap output power.
Dengan menggunakan tabel ini juga dimungkinkan untuk memilih output
power secara kontinyu untuk Mode S selective interrogation. Pemancar
Mode S Transmitter terdiri dari empat modul :
1. EMU (Exciter Modulator Unit)
EMU berisi modulator amplitudo dan phase untuk kanal SUM,
modulator amplitudo dan penguat-pra untuk kanal OMNI. Modul ini juga
memiliki rangkaian BIT (Built In Test). EMU memiliki antarmuka berikut :
a. Dengan Mode S Extractor (MEX) yaitu modul dari mana EMU
menerima sinyal modulasi Amplitudo dan Phase, dan yang
mengirimkan informasi BIT.
b. Dengan SDU yaitu modul yang meneruskan sinyal RF kanal SUM
untuk diperkuat.
c. Dengan CTU yaitu modul yang meneruskan sinyal RF kanal OMNI
untuk diperkuat.
Monopulse Secondary Surevillance Radar Page IV - 7
2. SDU (Sum Driver Unit)
SDU berisi pre-amplifier dari kanal SUM, dan rangkaian BIT (Built
In Test) sendiri. SDU memiliki antarmuka berikut :
a. Dengan Mode S Extractor (MEX) yang menerima informasi BIT.
b. Dengan EMU yaitu modul yang merupakan asal dari sinyal RF SUM
untuk diperkuat.
c. Dengan SAU yaitu modul yang meneriima sinyal RF SUM untuk tahap
penguatan selanjutnya.
3. SAU (Sum Amplifier Unit)
SAU berisi tahap pengatan akhir untuk kanal SUM, power control,
dan rangkain BIT (Built In Test) sendiri. SAU memiliki antarmuka berikut :
a. Dengan Mode S Extractor (MEX) yaitu modul dari mana SAU
menerima sinyal kontrol untuk memilih level power output dan yang
menerima informasi BIT.
b. Dengan SDU yaitu modul dari mana SAU menerima sinyal RF SUM
untuk diperkuat.
4. CTU (Control Transmitter Unit)
CTU berisi penguatan akhir untuk kanal OMNI, power control, dan
rangkain BIT (Built In Test) sendiri. CTU memiliki antarmuka berikut :
a. Dengan Mode S Extractor (MEX) yaitu modul dari mana CTU
menerima sinyal kontrol untuk memilih level power output dan yang
menerima informasi BIT.
b. Dengan EMU yaitu modul dari mana CTU menerima sinyal RF OMNI
untuk diperkuat.
Transmitter radar Mode S terdiri dari tiga detektor duty cycle untuk
melindungi diri terhadap overload. Masing-masing bekerja secara khusus
untuk mendeteksi overload pada jangka pendek, menengah dan panjang,
yaitu :
Monopulse Secondary Surevillance Radar Page IV - 8
- Jangka pendek detektor adalah ketika pemancar bekerja dengan duty
cycle dari 66,6% selama lebih dari 50 µs setelah pulsa pertama dalam
interogasi dan / atau pulsa RF dengan durasi yang lebih lama dari 32
mikrodetik dihasilkan, kemudian berhenti dan alarm kegagalan
pemancar dihasilkan.
- Jangka menengah detektor adalah pemancar dapat beroperasi dengan
duty cycle hingga 66% untuk 2,45 ms tanpa alarm untuk mengambil
tempat, dalam hal ini nilai itu melebihi, modul akan berhenti dan alarm
kegagalan pemancar dihasilkan.
- Jangka panjang detektor adalah jika pemancar bekerja dengan duty
cycle rata-rata lebih tinggi dari 6,6% selama interval 41 ms dari pulsa
pertama urutan interogasi, dalam hal ini sistem akan mengurangi
kepadatan interogasi, karena dapat menimbulkan overheating. Jika
terus beroperasi seperti ini, suhu modul akan meningkat sampai
peringatan terhadap suhu yang berlebihan akan muncul, akhirnya
memulai suhu alarm dan mengganggu operasi.
Transmitter Unit tidak memerlukan adjustment atau setting
apapun saat penggantian modul EMU, SDU, SAU dan CTU.
Transmitter Unit juga tidak memerlukan preventive maintenance
untuk setiap modulnya. Setiap modul telah dilengkapi dengan BITE
yang mendeteksi kemungkinan tidak berfungsinya masing-masing
modul dan port pemutus RF output untuk menyediakan fungsi
proteksi diri dengan memutus radiasi misal pada saat terdeteksi
VSWR yang tinggi. Saat menggantu modul dalam transmitter unit,
pengguna harus mematikan TPS dan menunggu selama 30 detik.
Walaupun tidak memerlukan preventive maintenance namun
disedikan pula test point untuk mengukur parameter-parameter
penting dalam transmitter unit, yang dapat dilihat pada gambar 4.4
berikut.
Monopulse Secondary Surevillance Radar Page IV - 9
Gambar 4.4. Test Point Transmitter Unit
C. Transmitter-Receiver-Antenna Interface Unit (TRA)
Fungsi utama dari modul TRA adalah meneruskan sinyal RF
dengan circulator pasif. Pada proses transmisi, TRA meneruskan
power output pada 1.030 MHz untuk SUM dan OMNI channel ke
antena. Sedangkan pada proses penerimaan TRA meneruskan
sinyal reply yang diterima pada 1.090 MHz untuk SUM, OMNI dan
DIFF channel ke MRU. TRA memiliki tiga filter untuk SUM, OMNI
dan DIFF channel yang berfungsi untuk menghilangkan sinyal yang
berada di luar band frekuensinya. TRA memiliki antarmuka berikut :
1. Dengan Mode S Extractor (MEX) yaitu modul yang menerima informasi
BIT dari TRA, yang mengirimkan perintah untuk mengukur daya yang
ditransmisikan dan terpantulkan, dan menyuntikkan sinyal uji ke arah
MRU.
2. Dengan SAU yaitu modul dari mana TRA menerima sinyal RF SUM
untuk diteruskan ke antena.
3. Dengan CTU yaitu modul dari mana TRA menerima sinyal RF OMNI
untuk diteruskan ke antena.
4. Dengan MRU yaitu modul yang menerima sinyal RF SUM, OMNI dan
DIFF yang diterima dari antena.
Monopulse Secondary Surevillance Radar Page IV - 10
Pada gambar 4.5a dapat dilihat letak modul TRA dalam rak,
sedangkan pada gambar 4.5b dapat dilihat antarmuka modul TRA
dengan modul lainnya. Pada gambar 4.5c dapat dilihat blok
diagram dari modul TRA.
(a) Tata letak TRA
(b) Antar Muka TRA
Monopulse Secondary Surevillance Radar Page IV - 11
(c) Blok Diagram TRA
(d) Test Point TRA
Gambar 4.5. Modul TRA
Test point untuk modul TRA ditunjukkan pada gambar 4.5d, di
mana dari test point tersebut dapat dilakukan pengukuran sinyal SUM dan
OMNI yang dipancarkan. Sebagai tempat menginjeksi sinyal tes (pulsa
atau reply) ke MRU baik untuk SUM, OMNI dan DIFF.
Monopulse Secondary Surevillance Radar Page IV - 12
Blok diagram modul CTRA (TRA control) dapat dilihat pada gambar
4.6, di mana modul CTRA ini memiliki fungsi sebagai berikut :
1. Injeksi tes target yang diprogram dari UCS di sistem manajemen dan
control. CTRA menerima sinyal modulasi dan menghasilkan sinya RF
untuk diinjeksikan ke dalam MRU. Setiap satu scan antena, tes target
akan dihasilkan dan selanjutnya diterima, diproses sebagai target
nyata dalam MRU.
2. CTRA mengumpulkan sample dari sinyal transmisi SUM dan OMNI,
serta sinyal pantul (refelcted), nilai tersebut dirubah menjadi sinyal
digital dan dikirim ke MEX. MEX mengirim semua nilai tersebut (sinyal
transmisi SUM dan OMNI, reflected power, SWR) bersama TRA BITE
ke sistem manajemen dan control. Selanjutnya aplikasi UCS akan
menghitung rasio SWR dari kedua channel, dan menampilkan dalam
tab pengukuran.
Gambar 4.6. Blok Diagram CTRA
D. Transmitter Power Supply module ( TPS )
Modul ini mensupply semua tegangan DC yang diperlukan
untuk modul EMU, SDU, CTU, SAU dan modul TRA. Pada bagian
depan TPS terdiri dari led dan tes point untuk memudahkan
pemantauan mudah dari output tegangan DC. modul ini terdiri dari
Monopulse Secondary Surevillance Radar Page IV - 13
lima kekuatan output power supply yaitu : +48 VDC, +28 VDC, +15
VDC, -15VDC dan +5 VDC. Tampak depan modul TPS dapat
dilihat pada gambar 4.7 berikut.
Gambar 4.7. Modul TPS
Untuk perawatan modul TPS, sangat penting untuk
memperhatikan prosesur switching on/off dengan mengikuti
langkah berikut ini :
1. Pengguna harus memeriksa apakah semua konektor telah terhubung
dengan modul TPS.
2. Pengguna harus menunggu selama 30 detik setelah mematikan modul
ini, karena rangkaian pengaman melakukan discharge capasitor +48V
dan hal ini memerlukan waktu 30 detik.
3. Setelah waktu tersebut, aman untuk memanupulasi TPS dan modul
CTT.
E. Transmitter Fans Unit ( TFU )
Modul ini menyediakan ventilasi yang diperlukan untuk
modul EMU, SDU, CTU, SAU dan TRA. Modul ini menyediakan
kecepatan udara pada 6 m/s melalui heatsink modul Transmitter
Mode S. Modul ini terdiri dari enam unit kipas ventilasi.
Monopulse Secondary Surevillance Radar Page IV - 14
F. Multichannel Receiver Unit ( MRU )
Tata letak Multichannel Receiver Unit (MRU) dalam rak
dapat dilihat pada gambar 4.8 berikut.
Gambar 4.8. Multichannel Receiver Unit
Sinyal reply yang dikirim oleh transponder pesawat pada
1.090 MHz diterima secara bersamaan oleh tiga kanal antena
SUM, OMNI dan DIFFERENCE, dan diteruskan ke MRU melalui RF
switch dan TRA Unit.
Transmitter-Receiver-Antena Interface Unit (TRA) berisi pre-
selective filter, yang berfungsi untuk menghilangkan sinyal yang
berada di luar band frekuensinya.
MRU terdiri dari tiga kanal penerima (SUM, OMNI dan
DIFFERENCE) yang melakukan proses demodulasi sinyal input
RF, untuk mendaptkan empat sinyal video yaitu SUM video (V),
OMNI video (ΩV), DIFFERENCE video (∆V) dan Monopulse video
(MV). Output video dikirim ke extractor unit khususnya menjadi
input pada video digitalizing board (TCPD). Sinyal video tersebut
dikirim kedua extractor unit, sehingga channel yang berada dalam
Monopulse Secondary Surevillance Radar Page IV - 15
kondisi stand-by menerima dan memproses sinyal video yang
sama dengan channel yang berada dalam kondisi main.
Tahap-tahap dalam MRU dapat dilihat pada gambar 4.9,
yang terdiri dari :
1. Penguatan RF (1090 MHz).
2. Filter frequency image (peredaman yang tinggi pada 1030 MHz, 970
MHz).
3. Pembuatan dan distribusi sinyal local oscillator (1030 MHz) untuk
demodulasi menjadi IF.
4. Mengkonversi dari RF menjadi intermediate frequency (60 MHz).
5. Penguatan IF.
6. Band pass filter IF.
7. Variable attenuator yang dikontrol oleg GTC (Gain Time Control) untuk
menjaga variasi power sinyal yang diterima dari IF filter. Receiver
memiliki delapan program GTC yang bisa dipilih pengguna dengan
menggunakan sektorm terpisah dari power dan mode interlacing.
8. Sinyal SUM dan DIFF dikirm ke Monopulse Detector untuk
mendapatkan sinyal monopulse video, prosesnya sebagai berikut :
- Monopulse Detector menerima sinyal SUM dan DIFF, dan
mengekstrak informasi kesalahan penunjukan antena terhadap
azimuth kedatangan sinyal RF.
- Monopulse Detector menghasilkan monopulse video yang
merupakan sinyal dengan amplitudo sebanding dengan sudut yang
dibentuk oleh arah dari mana jawaban itu diterima dan arah di
mana sumbu antena menunjuk.
- Monopulse Detector memiliki pendeteksi phase dan jenis ini disebut
Half-Angle.
- Monopulse Function meningkatkan akurasi dari pendeteksian
azimuth target.
- Dari sudut pandang antena, informasi sudut yang akan dikoreksi
terletak pada hubungan amplitudo dari jumlah dan sinyal
DIFFERNCE. Oleh karena itu, antena dimodelkan dengan fungsi
Monopulse Secondary Surevillance Radar Page IV - 16
transferensi antara hasil bagi jumlah dan amplitudo DIFFRENCE
dan sudut azimuth atau melalui mana jawaban atau sinyal diterima.
- Sinyal SUM dan DIFF terkandung dalam informasi azimuth dalam
kaitannya dengan amplitudo melintasi sirkuit hibrida
menggabungkan mereka, sehingga memperoleh tiga output yang
dikombinasikan secara vektor pada output. Dari titik ini, informasi
azimuth untuk dikoreksi terletak pada hubungan antara phase
vektor gabungan. Untuk melakukan hal ini, sinyal gabungan
melewati pebatas amplifier untuk menghilangkan variasi
kemungkinan amplitudo pada masukan dari dua detektor phase.
- Sebuah tegangan sebanding dengan hubungan amplitudo sinyal
SUM dan DIFF pada input detektor diperoleh pada output dari
masing-masing detektor phase. Setiap output dari detektor phase
menyebabkan penambah dari mana video monopulse diperoleh.
9. Sinyal SUM, DIFF dan OMNI dikirim ke Logarithm Detector, yang
menyediakan tegangan yang setara dengan input power (dBm) untuk
ketiga sinyal tersebut. Sinyal ini adalah sinyal video pada output MRU.
Gambar 4.9. Tahap-tahap MRU
G. Mode S Extractor ( MEX )
1. Deskripsi Umum
Tata letak Mode S Extractor (MEX) dala rak dapat dilihat
pada gambar 4.10, yang terdiri atas :
a. Satu board MICA 03 yang berfungsi sebagai antarmuka dengan
Transmitter Unit dan modul TRA.
b. Satu board MICA 02 yang berfungsi sebagai interface dengan semua
hardware sinyal I/O (misal ACP, ARP dan sebagainya).
Monopulse Secondary Surevillance Radar Page IV - 17
c. Satu Modul Processing yang terdiri dari :
- TCPD (Control and Digital Process Board), yang melaksanakan
digital signal processing (pendeteksian dan pendekodean sinyal
reply) dan fungsi Real Time Control Channel untuk operasi Mode S.
- TDLS (Serial Line Distribution Board), untuk menyediakan jalur
serial empat multi-protocol. Modul ini digunakan hanya jika
disyaratkan jalur serial. Board ini terdiri dari dua antarmuka yang
meneruskan jalur serial ke panel belakang. Kedua antarmuka
tersebut disebut TRLS (Serial Line Share Out Board) dan TADLS
(Serial Line Distribution Adapter Board).
- TCPU : board CPU yang menggunakan single PC processor.
Gambar 4.10. Tata Letak MEX
Modul power supply (MFEX) berfungsi menyediakan
tegangan yang diperlukan oleh MEX dan MRU. Sedangkan modul
fans unit (MVEX) yang terletak di bawah MEX untuk menjaga
temperatur dalam MEX. Tersedia juga test panel yang terdiri dari
12 test point untuk meningkatkan poses perawatan. Pada dasarnya
extractor melakukan fungsi-fungsi berikut :
- Komunikasi dengan sistem control dan monitoring.
- Pembangkit sinkronisme.
- Antarmuka dengan Transmitter Mode S, TRA dan modul MRU.
Monopulse Secondary Surevillance Radar Page IV - 18
- Pendeteksi dan pendekodean sinyal reply SSR dan dan Mode S.
- Pendeteksi dan pengolahan target SSR dan Mode S.
- Blanking dari Target Tercermin.
- Pelacakan Mode S selective yang bertugas sebagai manajemen Roll-
Call List dan Protokol Lockout.
- Transmisi data radar yang diformat dalam ASTERIX kategori 1 atau
kategori 48 yang dikirim melalui LAN dan jalu serial jika dipilih.
- BIT dari MEX, Transmitter, dan modul MRU.
Gambar 4.11. Blok Diagram MEX
Blok diagram MEX dapat dilihat pada gambar 4.11, di mana
dapat dilihat MEX menerima dan memproses sinyal video dari
MRU, mendeteksi sinyal reply SSR dan Mode S, membentuk plot
untuk semua pesawat dan outputnya dikirim ke ATC maupun Radar
maintenance Display. MEX juga mengirimkan sinyal pemodulasi ke
transmitter untuk proses interogasi. MEX mengontrol MRU,
Transmitter Unit dan TRA dengan menggunakan antarmuka digital
berikut :
- Dengan MRU, di mana MEX mengontrol semua pengaturan GTC.
Monopulse Secondary Surevillance Radar Page IV - 19
- Dengan MRU dan Transmitter Unit, di mana MEX melaksanakan
semua proses BIT, menghasilkan informasi status dan alarm untuk
sistem kontrol dan monitoring.
- Dengan TRA, di mana MEX terhubung melalui jalur serial untuk
pengukuran power baik transmisi maupun pantulan, dan menginjeksi
test sinyal RF. TRA mengirimkan data ke MEX dan melaluinya ke
sistem BITE dan sistem kontrol dan monitoring.
2. Arsitektur MEX Radar Processor
Arsitektur MEX Radar Processor dapat dilihat pada
gambar 4.12 berikut :
Gambar 4.12. Arsitektur MEX Radar Processor
MEX melakukan tiga fungsi yaitu Video Processor, Real
Time Channel Controller (RTCC) dan Link Control (LC). Pada tabel
4.1 dapat dilihat fungsi-fungsi yang dilakukan oleh MEX.
Monopulse Secondary Surevillance Radar Page IV - 20
Tabel 4.1. MEX Functionalities
3. Fungsi Utama TCPD
Fungsi utama dari TCPD dijelaskan berikut ini :
a. Video Processor
Sinyal raw video diterima dari MRU dikonversikan ke dalam sinyal
video digital (normalized) dan dikirim secara simultan ke SSR dan Mode S
Monopulse Secondary Surevillance Radar Page IV - 21
Reply Processor. Blok diagram video processor dapat dilihat pada gambar
4.13. Secara rinci fungsi yang dilakukan dalam video processor adalah
sebagai berikut :
1) Konversi analog ke digital 12 buit untuk empat output video MRU.
2) Sensistivity Time Control (STC) :
- Aturan STC dilaksanakan pada Digitalized SUM video untuk
menghilangkan semua amplitudo rendah.
- Bekerja bersama GTC pada MRU.
- Aturan STC dilaksanakan sebagai threshold variable untuk SUM
video.
- Ini memungkinkan untuk menghilangkan reply yang salah akibat
refleksi.
Gambar 4.13. Blok diagram video processor
3) Nominal Sensitivity adalah lebih baik dari -82 dBm
4) Pendeteksi pulsa yang salah : kurang dari 30 pulsa per detik.
5) Pendeteksi pulsa sempit, di mana pulsa yang diterima lebarnya kurang
dari 200ns akan dihilangkan.
6) Pendeteksi pulsa video :SUM video diproses untuk mendeteksi ujung
leading dan trailing untuk setiap pulsa.
Monopulse Secondary Surevillance Radar Page IV - 22
7) RSLS : melaksanakan pembandingan antara SUM video dan OMNI
video, untuk menandai semua pulsa yang diterima melalui sidelobe
antena. Ini diatur antara 0-20 dB.
8) Menghasilkan Normalized Video untuk menyediakan video yang akan
ditampilkan dalam Radar Maintenance Display atau pada oscilloscope.
Gambar 4.14. Video Pulse Detection
b. Real Time Channel Controller
Proses target memfasilitasi RTCC dengan informasi tentang
setiappesawat yang masuk dalam beam interogasi dan transaksi yang
diperlukannya (Roll Call List). RTCC menghasilkan interogasi yang
diperlukan untuk melaksanakan semua transaksi permintaan. Dalam setia
Video Gate (VG), RTCC melaksanakan manajemen dam proses reply
semua re-interogasi untuk setiap pesawat dalam periode selective
interrogation. Dalam RTCC terjadi pula proses :
1) SSR/Mode S Reply Processor
- Memproses sinyal dan mengektrak data dalam sinyal reply mode
1/2/3/A/C/S.
- Sinyal reply yang diterima dari video processor diproses oleh
SSR/Mode S Reply Processor dan membuat laporan untuk setiap
reply sebelum dikirim ke LC.
Monopulse Secondary Surevillance Radar Page IV - 23
- SSR Reply Processor melaksakanakan pendeteksian bracket,
sedangkan Mode S Reply Processor melaksanakan pendeteksian
preamble, pendeteksian dan perbaikan kesalahan yang disebut
dengan CRC.
- Reply yang terdeteksi dikirim ke PAF sebagai laporan yang berisi
informasi posisi, kode SSR untuk reply SSR, ICAO address, posisi,
pesan data dan status untuk reply Mode S.
2) Interrogation Scheduler
- Menjadwalkan sinyal interogasi yang dikirim ke transmitter, yang
diambil dari informasi yang diterima dari reply processor dan LC
(Roll Call List).
- Menghasilkan semua sinyal waktu dan modulasi untuk transmitter.
- Mengontrol power output RF.
- Menerima semua sinyal BITE transmitter untuk diproses, dan
menghasilkan pesan status dan alarm untuk sistem kontrol dan
monitoring.
Untuk lebih jelasnya tentang RTCC, berikut akan dijelaskan
secara terinci tentang :
1) SSR Reply Processor
- Pendeteksian Bracket : alogaritma ini mengikuti kriteria :
Jika pulsa valid terdeteksi (lebar pulsa > 200 ns) dalam jendela
pendeteksian, ini diasumsikan sebagai pulsa F1.
Selanjutnya mencari pulsa valid lainnya yang berjarak 20,3 µs
dari leading edge F1.
Jika kehadiran pulsa F2 telah dikomfirmasi maka dideklarasi
sebuah bracket.
Jika tidak, akan mengulangi alogarithma tersebut untuk rentang
pulsa berikutnya.
Spasi F1 – F2 untuk pendeteksian bracket :
Spasi 20,1 – 20,5 µs : 100 % detection
Monopulse Secondary Surevillance Radar Page IV - 24
Spasi < 19,95 µs : 100 % rejection
Spasi > 20,65 µs : 100 % rejection
- Pendeteksian Pulsa Kode
100 % detection jika posisi nominal ± 0,2 µs
100 % rejection jika posisi nominal ± 0,3 µs
- Penghilangan Phantom Reply
- Penghitungan jarak reply
- Pembuatan laporan SSR Reply yang dikirm ke PAF, terdiri dari :
Interrogation Mode
Kode dari Reply
Reply Code Confidence untuk setiap bitnya
Reply Range
Rata-rata SUM video amplitudo
Rata-rata Monopulse video amplitudo
RSLS flag untuk setiap pulsa kode reply
Data reply azimuth dari pedestal (presisi 0,022 untuk 1 ACP)
Koreksi monopulse table (presisi 0,0055 : ¼ ACP)
Flag kondisi (SPI, sinkron/asinkron garbling dengan reply
sebelumnya atau sesudahnya)
- Garble Resolution : dengan menggunakan empat urutan SSR reply,
SSR Reply Processor mampu untuk mendeteksi dan
mendekodekan lebih dari empat reply yang overlap.
Gambar 4.15. Bracket Detection
2) Mode S Reply Processor
- Preamble Detection : alogarithma ini mengikuti kriteria :
Monopulse Secondary Surevillance Radar Page IV - 25
Jika pulsa valid dideteksi (lebar > 200 ns) dalam jendela
pendeteksian, ini diasumsikan sebagai pulsa preamble.
Selanjutnya mencari tiga pulsa valid lainnya pada 1 µs, 3.5 µs
dan 4.5 µs dari leading edge pulsa pertama.
Jika kehadiran ketiga pulsa telah dikonfirmasi, dan setidaknya
salah satu dari ketiga pulsa tersebut memiliki leading edge yang
tepat pada posisi nominalnya, maka dideklarasikan sebuah
Preamble.
Jika preamble dideteksi maka pendeteksi bracket diblok untuk
menghindari kesalahan pendeteksian.
Jika tidak maka alogaritma ini akan diulangi untuk rentang pulsa
berikutnya.
Gambar 4.16. Preamble Detection
- Data Extraction
- CRC checking dari bagian AP atau IP yang diterima
- Pendeteksian dan pengkoreksian kesalahan : jika CRC tidak benar.
- Pembuatan laporan reply Mode S yang dikirim ke PAF, terdiri dari :
Downlink Format
ICAO Address (AA data field)
Message Data
Reply range
Rata-rata SUM video amplitudo
Rata-rata Monopulse video amplitudo
Flag RSLS untuk setiap pulsa kode
Data azimuth reply dari pedestal
Koreksi monopulse table
Monopulse Secondary Surevillance Radar Page IV - 26
- Pembuatan laporan status reply Mode S untuk setiap selective
interrogation. Laporan ini dikirim ke interrogator scheduler untuk
konfirmasi penerimaan setiap selective interrogation. Dalam kasus
reply ekspektasi tidak terdeteksi dan terdekodekanb dalam periode
terkait, interrogation scheduler akan secara otomatis menjadwalkan
re-interrogation dalam antena scan yang sama, yang berisikan :
Flag yang menunjukkan reply ekspektasi terdekodekan
Flag yang menunjukkan replay ekspektasi tidak terdekodekan
Data field DR (down request) untuk mendeteksi permintaan
untuk mengirim pesam Comm-B, tersedianya broadcast pesan
Comm-B dan tersedianya segmen downlink ELM
3) Interrogator Scheduler
Blok diagram interrogator scheduler dalam RTCC dapat dilihat pada
gambar 4.17. Interrogator Sceduler berfungsi sebagai :
- Kontrol kecepatan dan isi Mode S only All-Call interrogation
- Kontrol kecepatan dan output intermode A/C only All-Call
interrogation
- Kontrol kecepatan dan output intermode A/C/S All-Call interrogation
- Kontrol kecepatan dan output Mode A dan C interrogation
- Kontrol pewaktuan untuk Mode S selective interrogation
Monopulse Secondary Surevillance Radar Page IV - 27
Gambar 4.17. Blok Diagram Interrogator Scheduler
Untuk membuat semua fungsi ini, dilaksanakan sychronism generation
function dalam board TCPD dan MICA 03, yang terdiri dari :
- System Trigger Generation
Sistem hanya SSR : PRF dapat diprogram dari 50Hz sampai
dengan 450 Hz
Sistem Mode S : PRF SSR merupakan fungsi dari jumlah
interval All Call A/C/S interrogation yang didefinisikan pada
main beam, dibatasi sampai sampai 250 Hz.
PRF Mode S secara dinamis dikontrol tergantung jumlah
pergerakan Mode S.
Fungsi ini berisi juga kontrol stagger dengan kenaikan
perbedaan dead time (0 – 120 µs).
Stand-by channel menerima sinkronisasi dari main channel,
sehingga memungkinkan kedua channel memiliki referensi
waktu yang sama untuk memproses video yang sama dan
mendeteksi target yang sama.
- Modulation Signal Generation
SUM amplitude modulation : untuk menghasilkan P1, P2, P3,
dan P4, tergantung mode interrogasinya.
OMNI amplitude modulation : untuk menghasilkan P1, P2 dan
P5, tergantung mode interogasinya.
SUM phase modulation : untuk memodulasi P6 dalam interogasi
Mode S.
- Output Power Control Signal
Transmitter Mode S mampu memancarkan tujuh level power
yang berbeda. Level power adalah :
Tingkat 7 : Pmax = 65 dBm ± 1dB
Tingkat 6 : Pmax-2dB ± 1dB
Tingkat 5 : Pmax-4dB ± 1dB
Tingkat 4 : Pmax-6dB ± 1dB
Monopulse Secondary Surevillance Radar Page IV - 28
Tingkat 3 : Pmax-8dB ± 1dB
Tingkat 2 : Pmax-10dB ± 1dB
Tingkat 1 : Pmax-12dB ± 1dB
Lever power untuk interogasi SSR dipilih oleh pengguna.
Level power untuk Mode S Selective Interrogation diset secara
dinamis oleh extractor dalam bentuk jarak target.
- Interrogation Modes
SSR mode : 1, 2, 3 / A, B, C dan D.
Intermode : IAS, ICS, IAL dan ICL (P4 short atau long).
Mode Campuran : Mode S UF11 diikuti oleh IAS atau ICS
dalam periode interogasi yang sama. Sistem radar akan
menerima DF 11 (untuk UF 11 dari transponder Mode S) secara
simultan dan reply SSR (untuk IAS/ICS dani transponder tanpa
Mode S).
Mode S All-Call interrogation : UF11.
Mode S Selektive interrogation : UF4, UF5, UF20, UF21 dan
UF24.
- Interlacing : tergantung strategi yang dipilih dalam aplikasi UCS.
- Sinkronisasi Antenna : MEX memiliki dua input sinyal ACP dan
ARP untuk informasi azimuth antena. Jumlah ACP / scan harus
16384 pulsa dan 1 ARP/scan untuk orientasi arah utara.
- Sectoring Map dalam azimuth : MEX memungkinkan untuk
mendefinisikan hingga 128 sektor azimuth. Parameter berikut dapat
disektorisasi pada map yaitu :
Interlacing Mode
Power Output
GTC
SSR PRF
Blanking (tidak ada transmisi).
- Sinkronisasi Dual Channel : perangkat keras BUS pada board
MICA 02 dalam kedua MEX menyediakan sinkronisasi trigger dan
Monopulse Secondary Surevillance Radar Page IV - 29
interrogation. Protocol perangkat lunak antara kedua MEX melalui
LAN 1 dan LAN 2 menjamin sinkronisasi operasi antara kedua main
dan stand-by MEX.
- Sinkronisasi Waktu : kedua MEX terdiri atas klien NTP pada TCPU.
Pembacaan waktu UTC disediakan oleh NTP server dari LAN. Ini
digunakan sebagai Time Stamp semua kejadian dan untuk
ditambahkan ke pesan ASTERIX tentang waktu UTC pendeteksian
setiap target.
4. Fungsi Utama TCPU
Fungsi utama dari TCPU sebagai Link Control, yang bertugas :
a. Mentransfer reply SSR dan Mode S yang dihasilkan oleh TCPD ke
PAF.
b. Memutuskan data mana yang akan diminta dari pesawat dan dikirim ke
TCPD (interrogation scheduler).
c. Menyediakan mekanisme yang diperlukan sistem untuk melaksanakan
monitoring fungsinya.
d. Mensupervisi dan menyarankan ke sistem kontrol dan monitoring
tentang kondisi overload. Jika terjadi overload, link control akan
mengurangi jangkauan dan mempertahankan proses terhadap target
dalam wilayah tertentu.
Link Control terdiri dari :
a. Plot Assignor Function
Secara mendasar berfungsi :
- Proses semua reply SSR dan Mode S yang diterima dari RTCC
- Mengkorelasi track dan target, termasuk pendeteksian dan
penghilangan target yang salah.
- Data output dalam ASTERIX format.
- Aktualisasi Roll Call List
Monopulse Secondary Surevillance Radar Page IV - 30
Secara rinci proses yang dilakukan dalam Plot Assignor Funtion
adalah :
- SSR Reply Correlation : Proses ini mengkorelasikan reply SSR
yang dimiliki suatu target, di mana korelasi dilakukan pada jarak
dan azimuth dari reply yang didekodekan. Proses ini meliputi :
Fungsi Defruiter
Pendekodean plot garble menggunakan informasi monopulse
dan amplitudo reply
Kepercayaan terhadap kode target
Jarak dan azimuth target menggunakan informasi monopulse
Flag (SPI, I/P, kode darurat)
Pendeteksian dan penghilangan target yang salah
(pendeteksian reflection, split dan ring-around)
Reflector table maintenance
Gambar 4.18. Blok Diagram Plot Assignor Function
- SSR/Mode S plot combining : Ketika plot sudah dideteksi
menggunakan interogasi SSR dan interogasi Mode S, proses
kombinasi dilaksanakan. Kriteria penggabungan meliputi jarak,
Monopulse Secondary Surevillance Radar Page IV - 31
azimuth, korelasi waktu pendeteksian, dan kode Mode A maupun
Mode C.
- Plot Tracker or Tracking : Plot di time stamp dengan waktu terkait
azimuth plot. MEX memiliki table di mana semua pulsa ACP di time
stamp dengan penghitung lokal. Ketika permintaan NTP telah
dilayani, penghitung lokal akan dikorelasikan dengan waktu UTC
untuk menyediakan waktu UTC yang akurat pada setiap pulsa
ACP. Plot tracker atau tracking memiliki phase :
Proses inisialisasi track : menganalisa target pada beberapa
putaran untuk menetapkan sebuah track dari setiap pesawat
yang ditimbulkan dalam tiga putaran berulang.
Proses pengumpulan plot-track : mencoba mengumpulkan
setiap target yang terdeteksi dengan beberapa track yang
ditetapkan. Jika track telah ada, parameter ini akan di update.
Jika tidak terkumpul dengan tidak adanya track, diterukan ke
proses pembentukan track.
Prediksi dan pengakhiran track
Extractor memperoleh posisi yang telah dihitung,
maksudnya alogaritma dan pengumpulan track merupakan
fungsi dari posisi target pada putaran sebelumnya. Data
berasal dari target yang sama dikumpulkan dari putaran
antena sebelummya, membuat track dengan jumlah track.
Jika tidak diperoleh plot terukur maka plot terhitung akan
dikirim dengan suatu tanda identifikasi terkait.
Ketidakhadiran kumpulan plot selama tiga scan berturut-
turut akan menyebabkan pengakhiran track. Ketia dalam
scan antena, target telah membentuk track hilang maka
track terhitung akan dihasilkan dalam posisi awal. Proses
ini akan diulang selama maksimum dua putaran.
Ketika PAF mendeteksi target yang masuk ke dalam Cone
of Silence, tidak akan menghapus track tapi akan menjaga
Monopulse Secondary Surevillance Radar Page IV - 32
track tersebut sedikitnya 12 target simultan melalui Cone of
Silence menggunakan data histori yang ada.
- Monopulse Table Generation : PAF mampu melaksanakan
pembuatan tabel ini secara otomatis dan dimonitor oleh UCS. Tabel
monopulse akhir merupakan rata-rata statistik dari 150 tabel
individual yang dibuat oleh processor MEX menggunakan target
nyata (tidak garble dengan target lainnya).
- Plot Formatter : Plot diformat ke dalam bentuk ASTERIX kategori
34 dan 48 atau kategori 1 dan 2 untuk menjaga kecocokan dengan
sistem tanpa Mode S. Pemilihan kategori ASTERIX dan pemulihan
port output untuk setiap kategori dapat dilakukan oler pengguna
dari SLG/SRG. Proses OLM mengontrol format dan port output ini.
- Pendeteksian pesawat dengan duplikasi ICAO Address :
Pemrosesan banyak target menyebabkan kebingungan antara
yang nyata dan yang salah, di mana untuk sistem tanpa alamat
Mode S yang unik menggunakan proses tracking. Target
selanjutnya akan di flag dalam data ASTERIX sebagai “Duplicated
atau ilegal Mode S Aircraft Address”.
b. Link Management Process (LMP)
Berfungsi untuk mengontrol semua aktifitas Mode S link kecuali Mode
S All Call. LMP menjadwal interogasi yang menjadi hasil dari akuisisi
reply pesawat Mode S, yang telah terbentuk plot dan track dalam PAF.
Untuk setiap target dalam Roll Call List dan input target baru dari SCF,
LMP akan menbuat perintah interigasi kepada interrogator scheduler
pada RTCC. Antarmuka LMP dengan CMP dan RTCC melaksanakaqn
a data yang hilang dalam bandwidth kanal transmisi.
c. Roll Call List
Berisi informasi identifikasi, posisi dan register BDS terakhir dari target
yang ditracking oleh station. PAF menjaga Roll Call List update data
target. CMP dan SCF menggunakan roll call list untuk menjamin
aplikasi permintaan mampu untuk menginterogasi pesawat yang
dibutuhkan melalui Mode S Interrogator.
Monopulse Secondary Surevillance Radar Page IV - 33
Gambar 4.19. Blok Diagram Link Control
d. Communication Management Process (CMP)
Memproses semua permintaan transaksi data link tentang BDS dari
fungsi data link pesawat. CMP juga memproses permintaan data link
dari transponder ke klien sureveillance udara atau ke stasiun darat
lainnya.
e. Surveillance Coordination Function (SCF)
Fungsi ini digunakan untuk mencegah interference dengan stasiun
radar lainnya dengan cara :
- Penggunaan yang benar pada kode II/SI yang benar
- Penggunaan yang benar pada protocol Mode S yang berbeda
- Transponder lockout ke semua All Call interrogation
- Penggunaan yang benar pada wilayah coverage dan tangung
jawab
SCF mencapai hal ini dengan menjamin kerjasama antar stasiun. SCF
memungkinkan terjadinya antarmuka dengan lima atau lebih stasiun
Mode S, melalui Surveillance Coordination Network (SCN). SCF
menyediakan data track ke stastiun yang ada dalam cluster dan juga
bisa dilakukan untuk meminta informasi track dari stasiun lain.
Monopulse Secondary Surevillance Radar Page IV - 34
5. Fungsi Utama MICA 02
Fungsi Utama dari Firmware MICA 02 :
- Antarmuka dan BITE encoder
- Delay ARP untuk pengaturan utara
- Control Time Azimuth Table
- Antarmuka UTS absolute Time Counter
- Antarmuka PPI
Fungsi utama MICA 02 P0BUS :
- Koneksi cepat dan bebas antara TCPD, MICA 02 dan MICA 03
- MICA 02 adalah board yang mengatur akses ke bus
- Ini memungkinkan akses ke SWGENIST pada TCPD ke Time
Azimuth Table dan ke Counter Absolute Table
Gambar 4.20. Antarmuka MICA 02
6. Fungsi Utama MICA 03
- Menghasilkan sinyal sinkronisasi (trigger) pada radar dari internal
trigger dengan PRF yang bervariasi atau dari external trigger.
Monopulse Secondary Surevillance Radar Page IV - 35
- Mengatur durasi Interrogation Gate, Video Gate, Stagger Time dan
Death Time untuk melengkapi total minimum waktu untuk
interrogation cycle (PRT)
- Menghasilkan sinyal modulasi yang diperlukan untuk interrogator
(1, 2, 3/A, intermode dan mode S)
- Mengkonfigurasi power dari transmitter saat interogasi, baik ke
kanal SUM maupun OMNI.
- Fungsi dari transmitter dan receptor BIT.
- Memiliki Azimuth Table untuk parameter yang mudah dirubah
tergantung pada pengaturan sektor untuk :
Power Transmisi
Aktifasi fungsi ISLS
Aktifasi fungsi BLANKING
Aktifasi aplikasi interupsi melalui VME bus untuk merubah
sektor azimuth
Gambar 4.21. Antarmuka MICA 03
Monopulse Secondary Surevillance Radar Page IV - 36
7. Antar Muka Test Point
Pada sistem disediakan dua board test point dan satu test
point panel untuk maintenance. Pada test point ini termasuk juga
sinyal yang diperlukan untuk mengecek perpormance radar.
Gambar 4.22. Antarmuka Test Point
a. Test Point board pada MEX (TCPD)
- TP1 : PV (Video Gate)
- TP2 : Normalized Video
- TP3 : RSLS
- TP4 : Bracket Detection
- TP5 : Preamble Detection
Gambar 4.23. MEX Test Point Board
Monopulse Secondary Surevillance Radar Page IV - 37
b. Test point board pada MRU
- TP 23 : SUM video
- TP 12 : OMNI video
- TP 6 : DIFFERENCE video
- TP 17 : MONOPULSE video
Gambar 4.24. MRU Test Point Board
c. Test point panel pada MEX
- BST : MSSR trigger
- IG/PI : Interrogation Gate
- VG/PV : Video Gate
- VN : Normalized Video
- SAM : SUM Amplitude Modulation
- SPM : Sum Phase Modulation
- CAM : Omni Amplitude Modulation
- ACP A : Signal A dari Azimuth Count Pulse
- ARP : Azimuth Reference Pulse
- Dua Spare BNC Connector
Monopulse Secondary Surevillance Radar Page IV - 38
Gambar 4.25. MEX Test Point Panel
H. Power Relay Control
Panel depan dari PRC dapat dilihat dari gambar 4.26.
Adapun fungsi dari PRC adalah :
- Distribusi energi (3 phase) ke modul mode S
- Memindahkan (change over) Radio Frequency Relay (RRF)
Gambar 4.26. Panel depan power relay control
Monopulse Secondary Surevillance Radar Page IV - 39
Panel depan PRC terdiri dari elemen :
- Tiga pemutus rangkaian (A, B dan C)
- Satu time counter yang digunakan untuk menunjukkan lama sistem
telah mendapatkan power (jam operasi)
- Satu kunci kontrol yang digunakan untuk mengatur putaran antenna
Setiap satu dari ketiga power switch menunjukan satu phase input power
utama yang didistribusikan antara tiga rak dasar yaitu :
- Power switch A menyediakan satu phase power ke peralatan yang ada
di rak sebelah kiri.
- Power switch B menyediakan satu phase power ke peralatan
tambahan.
- Power switch C menyediakan satu phase power ke peralatan yang ada
di rak sebelah kanan.
Setiap pemutus rangkaian memiliki dua LED, di mana LED kiri
menunjukkan bahwa satu phase power telah tersedia dan LED kanan
menunjukkan pemutus rangkaian telah siap. Kunci kontrol memiliki satu
LED yang menunjukkan antena telah berputar saat ON. Kunci memiliki
hubungan listrik yang digabung ke antena drive system melalui satu
konektor pada panel belakang rak (PAN), sehingga saat kunci diputar ke
posisi OFF antenna akan berhenti dan tidak bisa dihidupkan lagi jika kunci
tidak diputar ke posisi ON.
I. Radio Frequency Switch (RRF)
RF switch dapat dilihat pada gambar 4.27. RF switch
memiliki tiga buah empat port relay coaxial L band. Ini
menyediakan switchover antara kedua channel untuk menjaga
main channel terhubung ke antenna dan standby channel
terhubung ke dummy load. RRF mendapat power 12 vdc secara
redundant dari MEX, hanya MEX 2 dalam kondisi main. Supply
sangat diperlukan oleh RF relay. Jika channel 1 off, channel 2
dapat mengatur RF relay dan jika channel 2 off, channel 1 tidak
diperlukan untuk mengatur relay.
Monopulse Secondary Surevillance Radar Page IV - 40
Gambar 4.27. RF Switch
Kontrol relay ini dilaksanakan oleh MEX dan perintah dari
UCS, dan kontrol ini dapat secara :
- Otomatis : Jika switchover diminta oleh aplikasi UCS sebagai akibat
dari kegagalan detection atau degradation dari semua parameter
supervisi main channel.
- Manual : Jika switchover diminta secara manual oleh pengguna melalui
aplikasi UCS. Biasanya digunakan saat melaksanakan perawatan, hal
ini bisa dimint dari lokal atau remote.
Seandainya terjadi kegagalan pada main channel maka switchover akan
dilaksanakan sedikitnya 259 ms dari kegagalan dikonfirmasi. Switchover
adalah komponen pasif yang tidak memerlukan perawatan.
J. Rear Connections Panel (PAN)
Rear koneksi panel (PAN) merupakan panel antarmuka yang
digunakan untuk menghubungkan triger eksternal pada rak MSSR
Mode S. PAN terdiri dari elemen :
- Pemutus rangkaian tambahan
- Konektor AC
- Konektor Pengatur Putaran Antenna (Konektor Antenna Drive System
Monopulse Secondary Surevillance Radar Page IV - 41
- Konektor pewaktu GPS
- Konektor encoder
- Konektor jalur serial
- Konektor sistem graphic
- Konektor jalur triger eksternal
Gambar 4.28. Rear Connections Panel
Monopulse Secondary Surevillance Radar Page IV - 42
K. Radar Control dan Suvervision Unit (UCS)
L. xx
Monopulse Secondary Surevillance Radar Page IV - 43
Anda mungkin juga menyukai
- Radar Dalam Bidang PenerbanganDokumen12 halamanRadar Dalam Bidang PenerbanganpenataBelum ada peringkat
- MW08Dokumen15 halamanMW08arifin.setiawan100% (1)
- Makalah Modulator AM & FMDokumen13 halamanMakalah Modulator AM & FMRizal RofiansyahBelum ada peringkat
- Lap. Radar Aninda - 30217001 (Tnu X-A)Dokumen11 halamanLap. Radar Aninda - 30217001 (Tnu X-A)Aninda Nurita AfriantiBelum ada peringkat
- Penjelasan Sistem Kerja Radar IndraDokumen14 halamanPenjelasan Sistem Kerja Radar IndraMustafa AjiBelum ada peringkat
- 22 - Randhitya Lintang - Prinsip Keja Radar IndraDokumen5 halaman22 - Randhitya Lintang - Prinsip Keja Radar IndraRandhitya LintangBelum ada peringkat
- Modul Antena Electronic SubsystemDokumen9 halamanModul Antena Electronic SubsystemJason JuanBelum ada peringkat
- Penjelasan Blok Diagram MSSR ELDISDokumen5 halamanPenjelasan Blok Diagram MSSR ELDISciwang 08Belum ada peringkat
- Mengenal Produk RadarDokumen26 halamanMengenal Produk RadarJoel Bbc SangPengembala KambingBelum ada peringkat
- Modul Praktikum Sistem KomunikasiDokumen9 halamanModul Praktikum Sistem KomunikasiRefinda Dwi CahyaniBelum ada peringkat
- Modul Praktikum Dst1Dokumen74 halamanModul Praktikum Dst1Riko Andika WijayaBelum ada peringkat
- Pontius Otniel Tampubolon-Tk 6d-Simulasi Rangkaian Penguat RF (Radio Frekuensi)Dokumen10 halamanPontius Otniel Tampubolon-Tk 6d-Simulasi Rangkaian Penguat RF (Radio Frekuensi)Otniel LoveBelum ada peringkat
- Laporan Dastel ASKDokumen6 halamanLaporan Dastel ASKwayuramadan.netBelum ada peringkat
- Buku Panduan DVOR MARU PDFDokumen27 halamanBuku Panduan DVOR MARU PDFFauzan AmansyahBelum ada peringkat
- Reza Fajarsyah - 41413120100 - Sistem Pemancar Dan Penerima - Elka TelkomDokumen29 halamanReza Fajarsyah - 41413120100 - Sistem Pemancar Dan Penerima - Elka TelkomrezagantsBelum ada peringkat
- Power PointDokumen13 halamanPower PointRyan BuninganiBelum ada peringkat
- RPP RadioDokumen92 halamanRPP RadioTa'wil Fattawa100% (1)
- TeleproteksiDokumen4 halamanTeleproteksiZulfahmi IslamiBelum ada peringkat
- Modul SSB FIxDokumen39 halamanModul SSB FIxgaluhBelum ada peringkat
- MODUL4Dokumen9 halamanMODUL4indra pramanaBelum ada peringkat
- AmplitudoDokumen18 halamanAmplitudoAndri WijayaBelum ada peringkat
- AM-SSB Gambar BetulDokumen37 halamanAM-SSB Gambar BetulAuLia ArvianaBelum ada peringkat
- Diagram Pemancar Dan Penerima Radio AnggaDokumen6 halamanDiagram Pemancar Dan Penerima Radio AnggaAnggaDe-PhollezzBelum ada peringkat
- Laporan Kerja Praktek IndraDokumen16 halamanLaporan Kerja Praktek IndraHadi SutiksnaBelum ada peringkat
- Laprak Octave Siskom Pak GinDokumen23 halamanLaprak Octave Siskom Pak GinMuhammad Algi AlgifariBelum ada peringkat
- Praktikum Modulator AM POLSRIDokumen32 halamanPraktikum Modulator AM POLSRIyoanyk100% (3)
- Laporan Demodulasi PWMDokumen17 halamanLaporan Demodulasi PWMhabibBelum ada peringkat
- Transmitter Yang ManualDokumen36 halamanTransmitter Yang ManualYolan OktarikaBelum ada peringkat
- Modul Elektronika Telekomunikasi (TM15)Dokumen14 halamanModul Elektronika Telekomunikasi (TM15)zain rezavkaBelum ada peringkat
- 7 ..9 Sistem Telekomunikasi Buku Lanjutan - CompressedDokumen43 halaman7 ..9 Sistem Telekomunikasi Buku Lanjutan - CompressedValentino HutabaratBelum ada peringkat
- Revisi Modul SSB (Siskomrad)Dokumen28 halamanRevisi Modul SSB (Siskomrad)ginanjarBelum ada peringkat
- Istilah Alat DUNIA PENERBANGANDokumen20 halamanIstilah Alat DUNIA PENERBANGANoktaBelum ada peringkat
- Praktikum PamDokumen16 halamanPraktikum PamRizal Aji IstantowiBelum ada peringkat
- Laporan Usart AyuDokumen40 halamanLaporan Usart AyuAinnur Rahayu PratiwiBelum ada peringkat
- Latihan Soal Dan Pembahasan AM DAN FMDokumen15 halamanLatihan Soal Dan Pembahasan AM DAN FMDila ZF75% (4)
- Laporan UsartDokumen48 halamanLaporan UsartAinnur Rahayu PratiwiBelum ada peringkat
- Analisa Bab 3Dokumen32 halamanAnalisa Bab 3Anonymous phm7cBGtBelum ada peringkat
- Basic RADARDokumen16 halamanBasic RADARKharismaIkaPrahastiBelum ada peringkat
- Radar ThomsonDokumen19 halamanRadar ThomsonAariBelum ada peringkat
- Makalah Perancangan RX IrvanDokumen6 halamanMakalah Perancangan RX IrvanIrvan BenuBelum ada peringkat
- Sistem Modulasi Amplitudo2Dokumen19 halamanSistem Modulasi Amplitudo2Amrul Hakim RomasBelum ada peringkat
- Pemancar FM Dengan Osilator PLL (Phase LockDokumen22 halamanPemancar FM Dengan Osilator PLL (Phase LockHaekal Iqbal IIBelum ada peringkat
- Pcm-Mux (Pulse Code Modulation Mux)Dokumen20 halamanPcm-Mux (Pulse Code Modulation Mux)Arya Wahyu WibowoBelum ada peringkat
- Dme (Distance Measurement Equipment)Dokumen6 halamanDme (Distance Measurement Equipment)Andreansyah Untung100% (1)
- Modul 04 Sistem Telemetri RadioDokumen8 halamanModul 04 Sistem Telemetri RadioZie Susi KomalasariBelum ada peringkat
- Pam Modulator Dan Pam DemodulatorDokumen7 halamanPam Modulator Dan Pam DemodulatorBagus IamBelum ada peringkat
- Laporan FM Tuner ModulatorDokumen31 halamanLaporan FM Tuner ModulatorCho Ed Poenik100% (1)
- Laporan Dastel AM DSB FCDokumen19 halamanLaporan Dastel AM DSB FCChristopher PrayogoBelum ada peringkat
- Laporan Ask JarjedDokumen34 halamanLaporan Ask Jarjedsitti hajar SyapiraBelum ada peringkat
- Modulasi AmDokumen9 halamanModulasi Amwahyu rizkiaBelum ada peringkat
- Sistem Komunikasi AnalogDokumen14 halamanSistem Komunikasi AnalogFikri Basa100% (1)
- Modul TJM TerbaruDokumen59 halamanModul TJM TerbaruayuBelum ada peringkat
- Fresha Resita - Radio LokomotifDokumen9 halamanFresha Resita - Radio LokomotifFresha ResitaBelum ada peringkat
- 5.2. Teory Blok Diagram Dvor AWA (2)Dokumen32 halaman5.2. Teory Blok Diagram Dvor AWA (2)Rhonny AlbertoBelum ada peringkat
- Radar EldisDokumen3 halamanRadar EldisAninda Nurita AfriantiBelum ada peringkat
- Sistem RX TXDokumen8 halamanSistem RX TXLocalgirlBelum ada peringkat
- Comunication and Navigation System - New2Dokumen20 halamanComunication and Navigation System - New2prastiya widodoBelum ada peringkat
- Budaya Keamanan (Security Culture)Dokumen46 halamanBudaya Keamanan (Security Culture)Hernanda HernandaBelum ada peringkat
- Peraturan Menteri Perhubungan Nomor 15 Tahun 2011Dokumen40 halamanPeraturan Menteri Perhubungan Nomor 15 Tahun 2011Hernanda HernandaBelum ada peringkat
- Analisa Kekuatan Konstruksi Suspensi Bogie NT 11 K5 Pada Gerbong Kereta Api PDFDokumen15 halamanAnalisa Kekuatan Konstruksi Suspensi Bogie NT 11 K5 Pada Gerbong Kereta Api PDFIndra BzBelum ada peringkat
- Pm. No. 17 Tahun 2011 PDFDokumen31 halamanPm. No. 17 Tahun 2011 PDFyurarizaldiBelum ada peringkat
- Rangkuman Sistem Teknik KebandarudaraanDokumen30 halamanRangkuman Sistem Teknik KebandarudaraanHernanda HernandaBelum ada peringkat
- Percobaan l2f008013 MtaDokumen6 halamanPercobaan l2f008013 MtaHernanda HernandaBelum ada peringkat
- Bab Viii Sistem MonitoringDokumen69 halamanBab Viii Sistem MonitoringHernanda HernandaBelum ada peringkat
- Bab V Antena Drive SystemDokumen39 halamanBab V Antena Drive SystemHernanda HernandaBelum ada peringkat
- Bab Vii Visual RadarDokumen25 halamanBab Vii Visual RadarHernanda HernandaBelum ada peringkat
- Bab Vi AntennaDokumen21 halamanBab Vi AntennaHernanda HernandaBelum ada peringkat
- Bab Iii Mode S MSSRDokumen8 halamanBab Iii Mode S MSSRHernanda HernandaBelum ada peringkat
- Bab Ii SSRDokumen35 halamanBab Ii SSRHernanda HernandaBelum ada peringkat
- Bab I PendahuluanDokumen13 halamanBab I Pendahuluanyaf17Belum ada peringkat
- Arduino PengenalanDokumen24 halamanArduino PengenalanAsep Widodo50% (2)
- Arduino PengenalanDokumen24 halamanArduino PengenalanAsep Widodo50% (2)