Anda mungkin juga menyukai
- Pancasila Dalam Kehidupan BerbangsaDokumen16 halamanPancasila Dalam Kehidupan BerbangsaCahyadi KsmBelum ada peringkat
- SPEKTROFLUOROMETRIDokumen73 halamanSPEKTROFLUOROMETRISelvianiBelum ada peringkat
- Teori GelombangDokumen3 halamanTeori GelombangSelvianiBelum ada peringkat
- Piranti OptoelektronikDokumen14 halamanPiranti OptoelektronikSelvianiBelum ada peringkat
- 12 Shalat Sunnah Berjamaah Dan MunfaridDokumen19 halaman12 Shalat Sunnah Berjamaah Dan MunfaridSelvianiBelum ada peringkat
- Ubi Jalar PutihDokumen7 halamanUbi Jalar PutihMocckkaae Itthu Maulida EkasariBelum ada peringkat
- Tajwid Pemula PDFDokumen47 halamanTajwid Pemula PDFMuhammad Anas Bahtiar100% (1)
- Indahnya Shalat Malam (Tuntunan Qiyamul Lail Dan Sholat Tarawih)Dokumen19 halamanIndahnya Shalat Malam (Tuntunan Qiyamul Lail Dan Sholat Tarawih)abc46Belum ada peringkat
- Haji WadaDokumen7 halamanHaji WadaSelvianiBelum ada peringkat
- Makalah PDFDokumen9 halamanMakalah PDFSelvianiBelum ada peringkat
- Makalah PDFDokumen9 halamanMakalah PDFSelvianiBelum ada peringkat
- SolatSunat PDFDokumen16 halamanSolatSunat PDFWanBelum ada peringkat
- CR022 - TahajjudDokumen21 halamanCR022 - Tahajjudapi-3764563100% (2)
- Form PPRDokumen1 halamanForm PPRrizkybenggoloBelum ada peringkat
- 11 InduktansiDokumen32 halaman11 InduktansiArga BrahmantyoBelum ada peringkat
- Panduan Shalat Istikharah Vrach 2010-07-01Dokumen57 halamanPanduan Shalat Istikharah Vrach 2010-07-01SelvianiBelum ada peringkat
- Bab9 OtakdansistemsarafDokumen19 halamanBab9 OtakdansistemsarafStevany NurifinBelum ada peringkat
- Tata Laksana Persuratan Organisasi KemahasiswaanDokumen39 halamanTata Laksana Persuratan Organisasi KemahasiswaanSelviani100% (1)
- Fiqh ShalatDokumen10 halamanFiqh ShalatIrvan Ahmad GhiezanBelum ada peringkat
- 02 016 Salat AlastsqaaDokumen4 halaman02 016 Salat AlastsqaaSelvianiBelum ada peringkat
- Sujud SahwiDokumen20 halamanSujud SahwiLutfi ChabibBelum ada peringkat
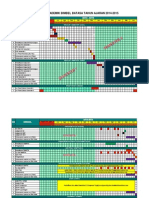
- Kalender Akademik Bimbel BatasaDokumen3 halamanKalender Akademik Bimbel BatasaSelvianiBelum ada peringkat
- Puasa 1Dokumen16 halamanPuasa 1SelvianiBelum ada peringkat
- Puasa Wajib &sunahDokumen7 halamanPuasa Wajib &sunahSadikin2Belum ada peringkat
- Rukun ImanDokumen4 halamanRukun ImanSelvianiBelum ada peringkat
- Puasa 1Dokumen16 halamanPuasa 1SelvianiBelum ada peringkat
- Panduan OSN Tahun 2014Dokumen51 halamanPanduan OSN Tahun 2014SelvianiBelum ada peringkat
- Soal Psikotes PDFDokumen5 halamanSoal Psikotes PDFMuhammad Noor100% (6)
- Bab IX EntropiDokumen15 halamanBab IX EntropiAnggie Anggrainiie100% (1)