Anda mungkin juga menyukai
- Laporan Praktikum Interferometer MichelsonDokumen13 halamanLaporan Praktikum Interferometer MichelsonRurouni KenshinBelum ada peringkat
- Laporan Pembentukan Bayangan Pada Lensa - Kelompok 3Dokumen30 halamanLaporan Pembentukan Bayangan Pada Lensa - Kelompok 3Luhde Ayu100% (1)
- Bab Iv Hasil Dan Pembahasan: 4.1 Pembentukan Modifikasi Model SEIQR Penyebaran Penyakit Sars-Cov-2Dokumen7 halamanBab Iv Hasil Dan Pembahasan: 4.1 Pembentukan Modifikasi Model SEIQR Penyebaran Penyakit Sars-Cov-2Lensa PurbaBelum ada peringkat
- (V) Jurnal TA Hanik (1 Lembar)Dokumen11 halaman(V) Jurnal TA Hanik (1 Lembar)Ai HaraBelum ada peringkat
- Solusi Numerik Model Umum SIR Dengan Menggunakan Metode Modified Milne Simpson Dipadukan Dengan Metode Runge Kutta Order 4Dokumen5 halamanSolusi Numerik Model Umum SIR Dengan Menggunakan Metode Modified Milne Simpson Dipadukan Dengan Metode Runge Kutta Order 4Trio Akhirul AnwarBelum ada peringkat
- CTH Referensi Penelitian (GRC)Dokumen8 halamanCTH Referensi Penelitian (GRC)Ristiandi 2000Belum ada peringkat
- Seminar Skripsi-Hasil-1Dokumen19 halamanSeminar Skripsi-Hasil-1Arman febriyanBelum ada peringkat
- HeterokedastisitasDokumen10 halamanHeterokedastisitasRhahmadani SusantiBelum ada peringkat
- PENGUJIAN PERBEDAAN RERATA POPULASI (Uji T) 3Dokumen5 halamanPENGUJIAN PERBEDAAN RERATA POPULASI (Uji T) 3Kirana Aulia PutriBelum ada peringkat
- Model SIR SederhanaDokumen6 halamanModel SIR SederhanaRara Sandhy WinandaBelum ada peringkat
- 13 - NugrohoDokumen11 halaman13 - NugrohoROFIE SYAFIQ10Belum ada peringkat
- Pendugaan Parameter-Pertemuan Ke 3Dokumen21 halamanPendugaan Parameter-Pertemuan Ke 3FalasifaBelum ada peringkat
- Jurnal StatistikDokumen7 halamanJurnal StatistikSherlina puspitaBelum ada peringkat
- Jurnal PencilanDokumen8 halamanJurnal Pencilanhas lanBelum ada peringkat
- Model SIR Penyakit Tidak FatalDokumen9 halamanModel SIR Penyakit Tidak FatalEllazka D'are100% (1)
- MA5161 MatKeu - Sem I 23-24 - 7 - Metode BinomialDokumen13 halamanMA5161 MatKeu - Sem I 23-24 - 7 - Metode BinomialREZKY MAYA ULFABelum ada peringkat
- None d796c677Dokumen6 halamanNone d796c677Fikran Ahmad Ahmad Al-HadiBelum ada peringkat
- Inferensia Vektor Rata-Rata PDFDokumen18 halamanInferensia Vektor Rata-Rata PDFnadiaBelum ada peringkat
- Inferensia Vektor Rata-Rata PDFDokumen18 halamanInferensia Vektor Rata-Rata PDFnadiaBelum ada peringkat
- Wiraraja - Sesi2 - 1 - Analisis RegresiDokumen28 halamanWiraraja - Sesi2 - 1 - Analisis RegresiANITA INTANBelum ada peringkat
- Stats Glo LokalDokumen11 halamanStats Glo LokalfahriBelum ada peringkat
- A Regreasi Linear BergandaDokumen7 halamanA Regreasi Linear BergandaBahrul UlumBelum ada peringkat
- 4 EstimasiDokumen18 halaman4 Estimasiluthfi pmiBelum ada peringkat
- Kelompok 11 (Pengujian Hipotesa)Dokumen24 halamanKelompok 11 (Pengujian Hipotesa)HelvinaBelum ada peringkat
- Chap 1 ANAVA1-2012 1-2013Dokumen22 halamanChap 1 ANAVA1-2012 1-2013Rika UlmairohBelum ada peringkat
- Beberapa Pola Epidemi Penyakit Infeksi Dan Per Model An MatematisnyaDokumen12 halamanBeberapa Pola Epidemi Penyakit Infeksi Dan Per Model An MatematisnyaradjadannyBelum ada peringkat
- Mata4217 M1Dokumen44 halamanMata4217 M1arsunalamanBelum ada peringkat
- Analisis Keadaan Dinamik Sistem LorenzDokumen1 halamanAnalisis Keadaan Dinamik Sistem LorenzAfrBelum ada peringkat
- 3291-Article Text-6534-1-10-20180129Dokumen8 halaman3291-Article Text-6534-1-10-20180129Ira ArsyahBelum ada peringkat
- Model S I RDokumen6 halamanModel S I RAprijon AnasBelum ada peringkat
- 2 PBDokumen10 halaman2 PBVikiBelum ada peringkat
- Pengujian Hypotesis 3Dokumen19 halamanPengujian Hypotesis 3arfBelum ada peringkat
- ID Pemodelan Dan Pemetaan Prevalensi KustaDokumen6 halamanID Pemodelan Dan Pemetaan Prevalensi KustaaprillianalaBelum ada peringkat
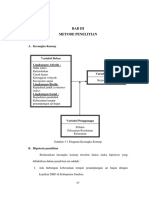
- 05 BAB III Abdul SyukurDokumen12 halaman05 BAB III Abdul SyukurNur AnindyaBelum ada peringkat
- Estimasi Kelompok 4Dokumen21 halamanEstimasi Kelompok 4Elisa Fitria RBelum ada peringkat
- Besar SampelDokumen37 halamanBesar Sampelmlyanab99Belum ada peringkat
- 10 Bab IvDokumen38 halaman10 Bab IvnurlinaofficeBelum ada peringkat
- Panduan Penulisan Artikel IlmiahDokumen10 halamanPanduan Penulisan Artikel Ilmiahdina jumiatul fitriBelum ada peringkat
- BiostatikDokumen95 halamanBiostatikWiwin Vaulina NapitupuluBelum ada peringkat
- 1Dokumen10 halaman1immer simamoraBelum ada peringkat
- MODUL 2 - Percobaan Satu FaktorDokumen40 halamanMODUL 2 - Percobaan Satu FaktorFauziah NurhidayahBelum ada peringkat
- Sifat Optik Non LinierDokumen6 halamanSifat Optik Non LinierKanita NIBelum ada peringkat
- Teori Pendugaan Teori EstimasiDokumen21 halamanTeori Pendugaan Teori EstimasiFerdykusumawardanaBelum ada peringkat
- Statistika Uji-TDokumen22 halamanStatistika Uji-TkeykanegenuineBelum ada peringkat
- Analisis Regresi Robust Estimasi-Mm Dalam Mengatasi Pencilan Pada Regresi Linear BergandaDokumen6 halamanAnalisis Regresi Robust Estimasi-Mm Dalam Mengatasi Pencilan Pada Regresi Linear BergandaAriady ZulkarnainBelum ada peringkat
- Laporan Fisika 1 Semester 2Dokumen5 halamanLaporan Fisika 1 Semester 2SAMUELBelum ada peringkat
- SP Baru V2Dokumen4 halamanSP Baru V2ScribdTranslationsBelum ada peringkat
- Sistem Bilangan Rasional. Modul UtDokumen44 halamanSistem Bilangan Rasional. Modul Utputrivivo1236Belum ada peringkat
- JURNAL KELOMPOK VII - Konsep Persamaan Diferensial Model Eksponensial Dalam Menjelaskan Kasus Positif Covid-19 Di Jakarta Dan Solusi MenurunkannyaDokumen4 halamanJURNAL KELOMPOK VII - Konsep Persamaan Diferensial Model Eksponensial Dalam Menjelaskan Kasus Positif Covid-19 Di Jakarta Dan Solusi MenurunkannyaA RNSBelum ada peringkat
- 6 Paradigma Post-Positivisme (Creswell)Dokumen3 halaman6 Paradigma Post-Positivisme (Creswell)Hidayati HidayatiBelum ada peringkat
- ID Pemodelan Regresi Poisson Inverse Gaussi PDFDokumen6 halamanID Pemodelan Regresi Poisson Inverse Gaussi PDFA. ALI FAISALBelum ada peringkat
- Kesetimbangan Kimia - 1Dokumen9 halamanKesetimbangan Kimia - 1Ansia TiaraBelum ada peringkat
- Estimasi 12Dokumen26 halamanEstimasi 12Dimas SugiantoBelum ada peringkat
- Model Kestabilan SEIRDokumen15 halamanModel Kestabilan SEIRAuliaAbrahamMarufBelum ada peringkat
- Materi Modul 2 Konsep Dasar IpsDokumen15 halamanMateri Modul 2 Konsep Dasar IpsReza NukhaBelum ada peringkat
- M9-PENGANTAR-STATSOS - Ikom-2021Dokumen6 halamanM9-PENGANTAR-STATSOS - Ikom-2021Christabel Betsy Benita Rachel PrasetyoBelum ada peringkat
- Model Matematika SirDokumen9 halamanModel Matematika Sirdeo putra pratamaBelum ada peringkat