Anda mungkin juga menyukai
- Time Series - ARIMADokumen18 halamanTime Series - ARIMAarifBelum ada peringkat
- Tapak e Prestasi PBPPP Kosong2 GBDokumen64 halamanTapak e Prestasi PBPPP Kosong2 GBCheak HanifBelum ada peringkat
- Pengujian OcrDokumen19 halamanPengujian OcrIlham Rahmat KurniaBelum ada peringkat
- Review Grafik 2 - 3 DimensiDokumen1 halamanReview Grafik 2 - 3 DimensidurrohBelum ada peringkat
- Format Nilai Tuweb MK Berpraktek Dan Praktek Pendas. 4 Nov 2020Dokumen39 halamanFormat Nilai Tuweb MK Berpraktek Dan Praktek Pendas. 4 Nov 2020tinoBelum ada peringkat
- Kuliah 9 Arima Non Musiman Contoh 1 Dan 2Dokumen38 halamanKuliah 9 Arima Non Musiman Contoh 1 Dan 2Lutfi Inayah100% (1)
- Kelompok 1Dokumen83 halamanKelompok 1tionglandBelum ada peringkat
- List Pembayaran MuncakDokumen1 halamanList Pembayaran Muncakalipm438Belum ada peringkat
- Data Percobaan 3 - Kelompok 1-4Dokumen2 halamanData Percobaan 3 - Kelompok 1-4Lutfia DABelum ada peringkat
- Yogi Gunawan Ramdani - Laporan Pengendali P, PI Dan PID - Sistem Kendali (P)Dokumen19 halamanYogi Gunawan Ramdani - Laporan Pengendali P, PI Dan PID - Sistem Kendali (P)32 - Yogi Gunawan RAccera KalompongBelum ada peringkat
- 02:05, 048 - 00:02: 298:02:0 5,048 - 00:02: 298 Rancangan Tersebut Diperlukan Rancang An Tersebu T Diperlu KanDokumen16 halaman02:05, 048 - 00:02: 298:02:0 5,048 - 00:02: 298 Rancangan Tersebut Diperlukan Rancang An Tersebu T Diperlu KanAbdul BasitBelum ada peringkat
- 02:05, 048 - 00:02: 298:02:0 5,048 - 00:02: 298 Rancangan Tersebut Diperlukan Rancang An Tersebu T Diperlu KanDokumen15 halaman02:05, 048 - 00:02: 298:02:0 5,048 - 00:02: 298 Rancangan Tersebut Diperlukan Rancang An Tersebu T Diperlu KanAbdul BasitBelum ada peringkat
- Presentasi Surveilans Kel 6 FINALDokumen13 halamanPresentasi Surveilans Kel 6 FINALIrma latifah HayatuddiniBelum ada peringkat
- Clinker Quality Indicators-NNDokumen19 halamanClinker Quality Indicators-NNFajarWidyawan100% (1)
- Bobot JabatanDokumen8 halamanBobot Jabatannunung dwi astutiBelum ada peringkat
- Pondok Mutiara-Rev4Dokumen4 halamanPondok Mutiara-Rev4Prasetia DennisBelum ada peringkat
- Form Work Sampling Kerja KaryawanDokumen3 halamanForm Work Sampling Kerja Karyawanceria pertiwiBelum ada peringkat
- Asumsi Cashflow (Januari 2023)Dokumen1 halamanAsumsi Cashflow (Januari 2023)Budi PrasetyoBelum ada peringkat
- Wireless Mipro Act 312b - E-Katalog 5.0Dokumen6 halamanWireless Mipro Act 312b - E-Katalog 5.0Rudi HartonoBelum ada peringkat
- Standar Naik Turun TanggaDokumen92 halamanStandar Naik Turun TanggaarvianBelum ada peringkat
- Perhiungan GrafikDokumen3 halamanPerhiungan GrafikBrawler Stars IndonesiaBelum ada peringkat
- Analisa Survey Kepuasan SusukanDokumen30 halamanAnalisa Survey Kepuasan Susukanamalia rizkaBelum ada peringkat
- TP 4 Metstat 2Dokumen10 halamanTP 4 Metstat 2Melsa Wulandari DiyharBelum ada peringkat
- Bab IvDokumen13 halamanBab IvRizky PangestuBelum ada peringkat
- TUGAS EKSPERIMEN FISIKA SEKOLAH 2 Lembar Kegiatan Peserta Didik KELOMPOK 6Dokumen23 halamanTUGAS EKSPERIMEN FISIKA SEKOLAH 2 Lembar Kegiatan Peserta Didik KELOMPOK 6Afrima NoriBelum ada peringkat
- FMEADokumen9 halamanFMEAdwi oktaBelum ada peringkat
- Pelaporan Dokumen Lingkungan Di Fasyankes - SuharionoDokumen51 halamanPelaporan Dokumen Lingkungan Di Fasyankes - SuharionoRhomy SiregarBelum ada peringkat
- Temenggung - Borang PenyertaanDokumen24 halamanTemenggung - Borang PenyertaanapiesanBelum ada peringkat
- Format Rekap Nilai Tuweb MK Berpraktik Dan Praktik FKIP (20102020)Dokumen31 halamanFormat Rekap Nilai Tuweb MK Berpraktik Dan Praktik FKIP (20102020)Yeni Dwi FebrilantiBelum ada peringkat
- Accaptance SamplingDokumen27 halamanAccaptance SamplingAditya LaksonoBelum ada peringkat
- Rizky Ananta - Laprak 1 SementaraDokumen18 halamanRizky Ananta - Laprak 1 SementararizkyanantaBelum ada peringkat
- RR & FMEA LabDokumen11 halamanRR & FMEA Lablab rsutebetBelum ada peringkat
- Beban RLDokumen18 halamanBeban RLPius SihotangBelum ada peringkat
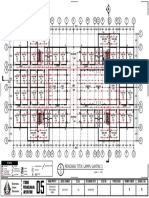
- Rencana Titik Lampu Lt.2Dokumen1 halamanRencana Titik Lampu Lt.2Millie LuckBelum ada peringkat
- Materi Perkuliahan Pengujian Parameter AquiferDokumen22 halamanMateri Perkuliahan Pengujian Parameter AquiferruslanBelum ada peringkat
- Form Panduan Standar SamplingDokumen1 halamanForm Panduan Standar SamplingShafarBelum ada peringkat
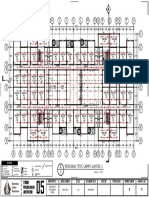
- Rencana Titik Lampu Lt.1Dokumen1 halamanRencana Titik Lampu Lt.1Millie LuckBelum ada peringkat
- Bismillah PPT SeminarDokumen14 halamanBismillah PPT SeminarDela Novita RiyaneBelum ada peringkat
- Format Nilai Tuweb Paud Dan PGSD Berpraktek Praktek Praktikum 2022Dokumen36 halamanFormat Nilai Tuweb Paud Dan PGSD Berpraktek Praktek Praktikum 2022RONY AGUS PERMADIBelum ada peringkat
- DaniDokumen14 halamanDaniHongce JayaBelum ada peringkat
- 17037006 (1)Dokumen5 halaman17037006 (1)Anita SarmilaBelum ada peringkat
- WI Mesin Tung YuDokumen2 halamanWI Mesin Tung YuFendi Adi PradanaBelum ada peringkat
- TUMOUR MAMAE T1-T2NxMx DAN T3-T4NxMx PDFDokumen13 halamanTUMOUR MAMAE T1-T2NxMx DAN T3-T4NxMx PDFKarinaWijayantiBelum ada peringkat
- Aliran Permanen SeragamDokumen8 halamanAliran Permanen SeragamEllida NovitaBelum ada peringkat
- Forecasting Menggunakan Metode ARIMADokumen24 halamanForecasting Menggunakan Metode ARIMAShindi Shella May WaraBelum ada peringkat
- Format Rekapitulasi CoklitDokumen111 halamanFormat Rekapitulasi CoklitbenBelum ada peringkat
- Hse Daily Report 04-11 Jan 2021 - 20210112 - 0001Dokumen15 halamanHse Daily Report 04-11 Jan 2021 - 20210112 - 0001hse KordinatorBelum ada peringkat
- R. Tidur Dapur R. MakanDokumen5 halamanR. Tidur Dapur R. MakanMuhammad AlfiBelum ada peringkat
- B - 18524062 - Bambang Tri Wahyudi - Prak9Dokumen2 halamanB - 18524062 - Bambang Tri Wahyudi - Prak9BAMBANG TRI WAHYUDIBelum ada peringkat
- Laporan Parktikum Pemrograman 10 - Durrotul Qodariyah - m0217026Dokumen9 halamanLaporan Parktikum Pemrograman 10 - Durrotul Qodariyah - m0217026durrohBelum ada peringkat
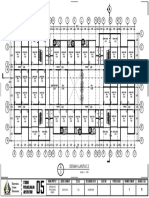
- Denah LT.2Dokumen1 halamanDenah LT.2Millie LuckBelum ada peringkat
- WPT Dan ABK Tahun 2023 CindyDokumen10 halamanWPT Dan ABK Tahun 2023 CindyMuh Hamdy. MeydiansyahBelum ada peringkat
- Laporan Praktikum Otomasi Industri Instruksi CounterDokumen33 halamanLaporan Praktikum Otomasi Industri Instruksi CounterShells shellyBelum ada peringkat
- Pengiraan EprestasiDokumen21 halamanPengiraan EprestasiMustapha Kamal HassanBelum ada peringkat
- Dasar Wiring App NewDokumen113 halamanDasar Wiring App NewaudiBelum ada peringkat
- 2A - Kelompok 2 - Praktik 4 Otomatisasi Dan Komunikasi DataDokumen11 halaman2A - Kelompok 2 - Praktik 4 Otomatisasi Dan Komunikasi DataMDollPRO HATERSBelum ada peringkat
- Teknik Kontrol Kurikulum 2021 PK WPDokumen164 halamanTeknik Kontrol Kurikulum 2021 PK WPJun HoBelum ada peringkat
- Enc Encoded 1jHVFg 6WfAIOsnciAWaxBWfVxBi3lberV98D YRLjAx7hRYFFxYvuF8OQtlVx6ADokumen3 halamanEnc Encoded 1jHVFg 6WfAIOsnciAWaxBWfVxBi3lberV98D YRLjAx7hRYFFxYvuF8OQtlVx6ATiurma Sinambela 19510093Belum ada peringkat
- (Sistem Digital) Praktikum Shift RegisterDokumen21 halaman(Sistem Digital) Praktikum Shift RegisterVigo SadewaBelum ada peringkat