Anda mungkin juga menyukai
- Bab 7 MarginalDokumen38 halamanBab 7 MarginalDevy Mayasari Silalahi67% (3)
- Trip Distribution Model (Theory)Dokumen10 halamanTrip Distribution Model (Theory)prijoBelum ada peringkat
- Transportation-8 (Model Sebaran Pergerakan - Graviti) TDK DiajarkanDokumen48 halamanTransportation-8 (Model Sebaran Pergerakan - Graviti) TDK DiajarkanKemenlu BEMSTIMLOGBelum ada peringkat
- Sebaran PergerakanDokumen18 halamanSebaran PergerakanWindy GeeBelum ada peringkat
- Double ConstratedDokumen5 halamanDouble ConstratedNanggar Dwi RaharjoBelum ada peringkat
- Model Distribusi SintetisDokumen22 halamanModel Distribusi SintetisAde GameBulanBelum ada peringkat
- Model Distribusi SintetisDokumen22 halamanModel Distribusi SintetisAde GameBulanBelum ada peringkat
- Model Distribusi SintetisDokumen22 halamanModel Distribusi SintetisAde GameBulanBelum ada peringkat
- Model Sebaran Pergerakan (Gravity)Dokumen36 halamanModel Sebaran Pergerakan (Gravity)Handoyo100% (2)
- Kalibrasi Model Sebaran PergerakanDokumen10 halamanKalibrasi Model Sebaran PergerakanArnanda Wahyu Maulana100% (1)
- Model Dasar Perenc. Transport - 073553Dokumen17 halamanModel Dasar Perenc. Transport - 073553karolina linaBelum ada peringkat
- Capthe 10Dokumen17 halamanCapthe 10Paquita SyaharaniBelum ada peringkat
- Pertemuan I Pengenalan Grafika Komputer (Grafika Vs Image Processing)Dokumen29 halamanPertemuan I Pengenalan Grafika Komputer (Grafika Vs Image Processing)Nur ImansyahBelum ada peringkat
- Fotogrametri Dan Pemetaan Kawasan FixDokumen12 halamanFotogrametri Dan Pemetaan Kawasan Fixridho sastraBelum ada peringkat
- Bab 1 SDOF Tak TeredamDokumen16 halamanBab 1 SDOF Tak TeredamReza ErmawanBelum ada peringkat
- Bab 5 Model Sebaran Pergerakan PDFDokumen73 halamanBab 5 Model Sebaran Pergerakan PDFDanny Steven Poluan100% (1)
- SDOF Tugas 2Dokumen9 halamanSDOF Tugas 2Taqwa RizaldyBelum ada peringkat
- DwisuryoKarismaMontol Assignment01Dokumen26 halamanDwisuryoKarismaMontol Assignment01Dwisuryo Karisma MontolBelum ada peringkat
- Rekayasa GempaDokumen18 halamanRekayasa GempaFitriansyah Adi Putra IrwanBelum ada peringkat
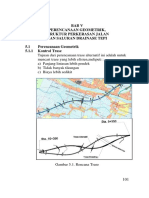
- Bab V Perencanaan Geometrik, Struktur Perkerasan Jalan Dan Saluran Drainase TepiDokumen82 halamanBab V Perencanaan Geometrik, Struktur Perkerasan Jalan Dan Saluran Drainase Tepijawarta simamoraBelum ada peringkat
- 5-Distribusi PerjalananDokumen35 halaman5-Distribusi PerjalananmuthiasBelum ada peringkat
- 8.6 Perkraan Penurunan Dari Hasil Uji OdometerDokumen5 halaman8.6 Perkraan Penurunan Dari Hasil Uji Odometerjhon magisaBelum ada peringkat
- Balok SilangDokumen10 halamanBalok Silangzacoeb_a1669Belum ada peringkat
- Bab 7 Pembebanan Lalu LintasDokumen28 halamanBab 7 Pembebanan Lalu LintaspriaardhanaBelum ada peringkat
- Terjemahan Tugas Review Artikel Jurnal - Kelompok 2Dokumen7 halamanTerjemahan Tugas Review Artikel Jurnal - Kelompok 2Rio AcengBelum ada peringkat
- Distribusi Lalu LintasDokumen46 halamanDistribusi Lalu LintasBagus Sukma PutraBelum ada peringkat
- Rekayasa GempaDokumen16 halamanRekayasa GempaCharles KambaBelum ada peringkat
- Exp 04 Inversi Non-Linier Data Gempa BumiDokumen7 halamanExp 04 Inversi Non-Linier Data Gempa BumiAgussaputraIkomangBelum ada peringkat
- Bab 5 Trip DistributionDokumen9 halamanBab 5 Trip DistributionNicko Gumarosa SiregarBelum ada peringkat
- Makalah Tugas Mattek IIDokumen11 halamanMakalah Tugas Mattek IIKelita Mea MelacaBelum ada peringkat
- Jelaskan Pengertian Tanda Tangan KonturDokumen3 halamanJelaskan Pengertian Tanda Tangan KonturEX ClanBelum ada peringkat
- 5 Gaya Batang Pada Balok Dan FrameDokumen16 halaman5 Gaya Batang Pada Balok Dan FrameHariatiBelum ada peringkat
- Redundant Dan Paralel ManipulatorDokumen6 halamanRedundant Dan Paralel ManipulatorMuhamad Yusuf SupriadiBelum ada peringkat
- Laporan KJR2Dokumen5 halamanLaporan KJR2Wibianto Ari PamungkasBelum ada peringkat
- Akcelik SignalisedDokumen96 halamanAkcelik SignalisedHerni Maulina RahayuBelum ada peringkat
- Metode Memprediksi Penurunan Tanah DilapanganDokumen7 halamanMetode Memprediksi Penurunan Tanah DilapangannatalianduaBelum ada peringkat
- Parju A NganDokumen20 halamanParju A NganSuhardy TambunanBelum ada peringkat
- Linear ProgrammingDokumen15 halamanLinear ProgrammingDhitya Suryaputra AriendraBelum ada peringkat
- LAPORAN PRAKTIKUM Komputer GrafisDokumen22 halamanLAPORAN PRAKTIKUM Komputer Grafissri erfianaBelum ada peringkat
- Bahan Ajar DRT3 - Permintaan Atas Jasa TransportasiDokumen14 halamanBahan Ajar DRT3 - Permintaan Atas Jasa TransportasiChrista Gallegos100% (3)
- Metode Gravitasi Untuk Perencanaan LingkunganDokumen10 halamanMetode Gravitasi Untuk Perencanaan LingkunganG.a. PratamaBelum ada peringkat
- Bahan Paparan Kelompok 4 BPPJ 2022Dokumen40 halamanBahan Paparan Kelompok 4 BPPJ 2022Slamet PrabowoBelum ada peringkat
- Trip AssigmentDokumen24 halamanTrip AssigmentrenditeguhBelum ada peringkat
- Modul11 MIK106 Aljabar LinierDokumen15 halamanModul11 MIK106 Aljabar Liniereviyuniar91Belum ada peringkat
- Modul 1 DownscalingDokumen5 halamanModul 1 DownscalingsheilamegumiBelum ada peringkat
- Hough Transform Deteksi GarisDokumen15 halamanHough Transform Deteksi GarisNgurah Padank AdnyanaBelum ada peringkat
- TUGAS FOTOGRAMETRI Triangulasi UdaraDokumen25 halamanTUGAS FOTOGRAMETRI Triangulasi UdaraAlpin Pratama100% (1)
- Pengukuran Jaringan TelekomunikasiDokumen20 halamanPengukuran Jaringan TelekomunikasiArya Wahyu WibowoBelum ada peringkat
- Pendugaan Parameter GSMDokumen13 halamanPendugaan Parameter GSMErica Fera JuwitaBelum ada peringkat
- Anti-Sway Container Crane Control System Using Fuzzy-Tuned PID ControllerDokumen8 halamanAnti-Sway Container Crane Control System Using Fuzzy-Tuned PID ControllerRiky FitriadiBelum ada peringkat
- Natasha Putri - 24060119130073 - 4 - A2Dokumen22 halamanNatasha Putri - 24060119130073 - 4 - A2Natasha PutriBelum ada peringkat
- Analisa Numerik Kecepatan Benda Jatuh Bebas Dengan Menggunakan Metode Heun Berbasis MatlabDokumen10 halamanAnalisa Numerik Kecepatan Benda Jatuh Bebas Dengan Menggunakan Metode Heun Berbasis MatlabEdi Prasetyo100% (1)
- Four Step ModelDokumen10 halamanFour Step ModelFebri Awalia HimawanBelum ada peringkat
- Metode Integrasi NumerikDokumen7 halamanMetode Integrasi NumerikdhiafahheraBelum ada peringkat
- 05.3 Bab 3Dokumen26 halaman05.3 Bab 3auliaBelum ada peringkat
- Simulasi PenawaranDokumen3 halamanSimulasi Penawarandhian hidayatBelum ada peringkat
- TKDNDokumen8 halamanTKDNdhian hidayatBelum ada peringkat
- Adjus Versi A3Dokumen15 halamanAdjus Versi A3dhian hidayatBelum ada peringkat
- Baja Tulangan U24Dokumen50 halamanBaja Tulangan U24dhian hidayatBelum ada peringkat
- Boxk 250Dokumen28 halamanBoxk 250dhian hidayatBelum ada peringkat
- Beton K - 250 (Semenisasi)Dokumen3 halamanBeton K - 250 (Semenisasi)dhian hidayatBelum ada peringkat
- Jiunkpe Is s2 2016 01514003 36877 Metode Appendices - 3Dokumen40 halamanJiunkpe Is s2 2016 01514003 36877 Metode Appendices - 3dhian hidayatBelum ada peringkat
- Cver+kata PengantarDokumen2 halamanCver+kata Pengantardhian hidayatBelum ada peringkat
- Cor Beton B NolDokumen3 halamanCor Beton B Noldhian hidayatBelum ada peringkat
- Cover CDDokumen1 halamanCover CDdhian hidayatBelum ada peringkat
- ss5 11 Pipa Baja Karbon Untuk Konstruksi Umum Sni 0068 r01Dokumen16 halamanss5 11 Pipa Baja Karbon Untuk Konstruksi Umum Sni 0068 r01dhian hidayatBelum ada peringkat
- Skripsi Fajar - 2Dokumen174 halamanSkripsi Fajar - 2dhian hidayatBelum ada peringkat