Anda mungkin juga menyukai
- Pengaturan Kecepatan Motor BLDC Dengan Metode PWM Six Step Sebagai Penggerak Sepeda ListrikDokumen5 halamanPengaturan Kecepatan Motor BLDC Dengan Metode PWM Six Step Sebagai Penggerak Sepeda Listrikharis altamiraBelum ada peringkat
- Motor Servo (Autosaved)Dokumen14 halamanMotor Servo (Autosaved)SyaifuddinBelum ada peringkat
- Aplikasi Mikrokontroler Atmega8535 Sebagai Pembangkit PWM Sinusoida 1 FasaDokumen12 halamanAplikasi Mikrokontroler Atmega8535 Sebagai Pembangkit PWM Sinusoida 1 FasaDsis TheaBelum ada peringkat
- Modulasi Lebar PulsaDokumen14 halamanModulasi Lebar PulsaAnonymous DMHKN9IHBelum ada peringkat
- D029-Aktuator ElektrikDokumen8 halamanD029-Aktuator ElektrikYusufBelum ada peringkat
- Budi Somantri - 12-2017-105 - Mekatronika Aa - Tugas 3 PDFDokumen11 halamanBudi Somantri - 12-2017-105 - Mekatronika Aa - Tugas 3 PDFArdanBelum ada peringkat
- Lingga Wiyandi Tugas InverterDokumen10 halamanLingga Wiyandi Tugas InverterLingga WiyandiBelum ada peringkat
- Inverter 3 Fasa PDFDokumen6 halamanInverter 3 Fasa PDFDeden Muhammad RamdanBelum ada peringkat
- Inverter 3 Fasa PDFDokumen6 halamanInverter 3 Fasa PDFDeden Muhammad RamdanBelum ada peringkat
- OhmeterDokumen7 halamanOhmetersheiiBelum ada peringkat
- Mikrokontroler Atmega8535 Sebagai Pembangkit PWM Sinusoida 1 FasaDokumen8 halamanMikrokontroler Atmega8535 Sebagai Pembangkit PWM Sinusoida 1 FasaevhyajahBelum ada peringkat
- Aktuator 1Dokumen10 halamanAktuator 1Aldi AlfariziBelum ada peringkat
- PWMDokumen27 halamanPWMSatriani RahmayantiBelum ada peringkat
- Motor Servo Adalah Sebuah Motor Dengan Sistem Umpan Balik Tertutup Di Mana Posisi Dari Motor Akan Diinformasikan Kembali Ke Rangkaian Kontrol Yang Ada Di Dalam Motor ServoDokumen3 halamanMotor Servo Adalah Sebuah Motor Dengan Sistem Umpan Balik Tertutup Di Mana Posisi Dari Motor Akan Diinformasikan Kembali Ke Rangkaian Kontrol Yang Ada Di Dalam Motor ServoMustofaBelum ada peringkat
- Motor DC Brushless Tiga Fasa-Satu KutubDokumen6 halamanMotor DC Brushless Tiga Fasa-Satu KutubMaula AhmadBelum ada peringkat
- Tugas Resume Pengendalian Motor BDokumen4 halamanTugas Resume Pengendalian Motor BKevin M TandisauBelum ada peringkat
- Buck Dan Boost Regulator Dengan Metode PWM (IC NE555)Dokumen9 halamanBuck Dan Boost Regulator Dengan Metode PWM (IC NE555)Dewa Yudha0% (1)
- Inverter 3 FasaDokumen6 halamanInverter 3 FasaFadli UmawiBelum ada peringkat
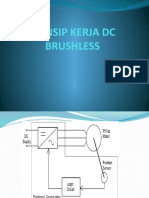
- Prinsip Kerja DC BrushlessDokumen23 halamanPrinsip Kerja DC BrushlessGhozi PratamBelum ada peringkat
- Pulse Width ModulationDokumen11 halamanPulse Width ModulationEjawantah PikiranBelum ada peringkat
- LAPLENGKAP - MEKATRONIKA - PERT13 - Nur FachirahDokumen26 halamanLAPLENGKAP - MEKATRONIKA - PERT13 - Nur FachirahNur FachirahBelum ada peringkat
- Motor DC BrushlessDokumen8 halamanMotor DC BrushlessLuthvi Okiariandi100% (1)
- Laporan Praktikum IV MOTOR SERVODokumen13 halamanLaporan Praktikum IV MOTOR SERVOAlvina RizkyBelum ada peringkat
- Dasar Pengendalian Putaran Motor DCDokumen11 halamanDasar Pengendalian Putaran Motor DCSaf RiBelum ada peringkat
- TUGAS MATLAB MESIN AC - Muhammad Alwi - 210204502032 - PTE 02Dokumen10 halamanTUGAS MATLAB MESIN AC - Muhammad Alwi - 210204502032 - PTE 02Muhammad AlwiBelum ada peringkat
- The Main Difference Between AC and DC Motor Rotates in The Case of AC MotorsDokumen2 halamanThe Main Difference Between AC and DC Motor Rotates in The Case of AC MotorsSeptianto FighterBelum ada peringkat
- Pengaturan Kecepatan Dan Posisi Motor Ac 3 PhasaDokumen9 halamanPengaturan Kecepatan Dan Posisi Motor Ac 3 Phasaade yoviansyahBelum ada peringkat
- Pulse Width ModulationDokumen5 halamanPulse Width ModulationNurIndahRivaiBelum ada peringkat
- Tugas Widya Apri WandiniDokumen15 halamanTugas Widya Apri WandiniPendi AriantoBelum ada peringkat
- Materi 6Dokumen8 halamanMateri 6Mahmud MahmudBelum ada peringkat
- Peer Review Motor BLDC Dengan AplikasinyaDokumen4 halamanPeer Review Motor BLDC Dengan AplikasinyaAzizah Nur Fitri ChaniagoBelum ada peringkat
- Mesin Listrik 2Dokumen17 halamanMesin Listrik 2Marcella PratamaBelum ada peringkat
- 1317 3490 1 SMDokumen8 halaman1317 3490 1 SMRendy MuhammadBelum ada peringkat
- 2.a.servo MotorDokumen6 halaman2.a.servo MotorLulu LutfiaBelum ada peringkat
- BLDC (Brushless DC)Dokumen2 halamanBLDC (Brushless DC)Sherina AdeliaBelum ada peringkat
- Motor ServoDokumen3 halamanMotor ServoPipi JejeBelum ada peringkat
- Rancang Bangun Penggerak Daya Motor BrusDokumen18 halamanRancang Bangun Penggerak Daya Motor Brusakhmad wirantoBelum ada peringkat
- Motor Servo - Actuator - 171810201052Dokumen5 halamanMotor Servo - Actuator - 171810201052Ultimatum karomahBelum ada peringkat
- Antarmuka Modul Driver Motor DC L298N Dengan ArduinoDokumen27 halamanAntarmuka Modul Driver Motor DC L298N Dengan ArduinouyuniBelum ada peringkat
- Laporan Praktiku 3 MOTOR SERVODokumen17 halamanLaporan Praktiku 3 MOTOR SERVOAbdur RohmanBelum ada peringkat
- Laporan Simulek 6 BLDC - Rais Ovadeyyanusasey A - 19-445572-Pa-19396Dokumen7 halamanLaporan Simulek 6 BLDC - Rais Ovadeyyanusasey A - 19-445572-Pa-19396RAIS OVADEYYANUSASEY OVADEYYANUSASEYBelum ada peringkat
- Robotika - 3 (Mekanik Robot)Dokumen40 halamanRobotika - 3 (Mekanik Robot)Chaeriah WaelBelum ada peringkat
- Motor StepperDokumen6 halamanMotor StepperRoniAmirChamdaniBelum ada peringkat
- Motor DCDokumen11 halamanMotor DCWildan Fadlan KhairinBelum ada peringkat
- Soft Starter and Soft Stop SequenceDokumen6 halamanSoft Starter and Soft Stop Sequenceajisetyo1990Belum ada peringkat
- Makalah StepperDokumen9 halamanMakalah StepperDedi Ridwan Fauzi100% (1)
- Pengendalian Motor DC Dengan Metode PWMDokumen15 halamanPengendalian Motor DC Dengan Metode PWMMeutia RahmahBelum ada peringkat
- Aplikasi Unidrive 2402Dokumen30 halamanAplikasi Unidrive 2402weareonBelum ada peringkat
- Aktuator Berbasis ArduinoDokumen10 halamanAktuator Berbasis ArduinoEdwin Syihab HariantoBelum ada peringkat
- Perbandingan Teknik Modulasi Inverter 3-Phasa 2-Tingkat Untuk Menghasilkan Tegangan Keluaran VariabelDokumen8 halamanPerbandingan Teknik Modulasi Inverter 3-Phasa 2-Tingkat Untuk Menghasilkan Tegangan Keluaran VariabelLauretti YovitaBelum ada peringkat
- Tugas Mata Kuliah RobotikaDokumen19 halamanTugas Mata Kuliah RobotikavhendrayawanBelum ada peringkat
- Motor ServoDokumen4 halamanMotor ServoKrishna Yuwana100% (1)
- Motor StepperDokumen9 halamanMotor SteppernovrizaaaBelum ada peringkat
- Soft StarterDokumen7 halamanSoft StarterAlloh HambaBelum ada peringkat