Anda mungkin juga menyukai
- LIMIT-FUNGSIDokumen26 halamanLIMIT-FUNGSILuthvi OkiariandiBelum ada peringkat
- BLDC TeoriDokumen15 halamanBLDC TeoriGilang SeptianBelum ada peringkat
- Pengaturan Kecepatan Motor BLDC Dengan Metode PWM Six Step Sebagai Penggerak Sepeda ListrikDokumen5 halamanPengaturan Kecepatan Motor BLDC Dengan Metode PWM Six Step Sebagai Penggerak Sepeda Listrikharis altamiraBelum ada peringkat
- MQTT RaspberryDokumen16 halamanMQTT RaspberryAndi SeptianaBelum ada peringkat
- TM 01 Pengantar RobotikaDokumen47 halamanTM 01 Pengantar RobotikaM FebriansyahBelum ada peringkat
- Redesaign Mesin Pengupas Kulit KopiDokumen73 halamanRedesaign Mesin Pengupas Kulit Kopijunaidi100% (1)
- Python Dan MQTT BrokerDokumen10 halamanPython Dan MQTT BrokerNanak Cito TetukoBelum ada peringkat
- Tugas Sistem WiperDokumen6 halamanTugas Sistem WiperAfrian DiansyahBelum ada peringkat
- RANCANG BANGUN ALAT PENGUPASDokumen14 halamanRANCANG BANGUN ALAT PENGUPASJack Agung Sihombing100% (1)
- PWM Dan RPMDokumen11 halamanPWM Dan RPMAndi Nova AhmadBelum ada peringkat
- Piezo GeneratorDokumen11 halamanPiezo Generatorwildan_dzulqarnainBelum ada peringkat
- Proposal Skripsi RyanDokumen30 halamanProposal Skripsi Ryanbayoe frBelum ada peringkat
- Rangkaian Warna Kabel Kiprok Semua Motor LengkapDokumen4 halamanRangkaian Warna Kabel Kiprok Semua Motor LengkapAmoz RobynzonBelum ada peringkat
- Bab12 Gaya Gaya Pada MekanismeDokumen35 halamanBab12 Gaya Gaya Pada MekanismeFaisal Budiman100% (1)
- AVOMETER DIGITALDokumen29 halamanAVOMETER DIGITALhaditya gayendra putraBelum ada peringkat
- Sistem Acg Honda Vario 125Dokumen2 halamanSistem Acg Honda Vario 125Armund.exeBelum ada peringkat
- DASAR-DASAR KELISTRIKANDokumen3 halamanDASAR-DASAR KELISTRIKANWawan Dwi IdhayanaBelum ada peringkat
- Cara Membuat Mobil Listrik SederhanaDokumen6 halamanCara Membuat Mobil Listrik SederhanadedeBelum ada peringkat
- MOSFET dan IGBTDokumen9 halamanMOSFET dan IGBTMardika PratamaBelum ada peringkat
- JENIS GENERATORDokumen3 halamanJENIS GENERATORDeni SaifudinBelum ada peringkat
- Wiring Diagram Pin Out Spido New CB150RDokumen4 halamanWiring Diagram Pin Out Spido New CB150RWAHYU SUGIONOBelum ada peringkat
- Inverter 2Dokumen9 halamanInverter 2Bambang HandokoBelum ada peringkat
- Bocor Di Kabin Katana Saat Musim HujanDokumen31 halamanBocor Di Kabin Katana Saat Musim HujanReza RenardiBelum ada peringkat
- Dasar-Dasar Motor BensinDokumen131 halamanDasar-Dasar Motor BensinRyan Bagas WicaksonoBelum ada peringkat
- MotorDCPrinsipDokumen24 halamanMotorDCPrinsipmuhammad iksan ilahiBelum ada peringkat
- OPTIMASI MINYAK NABATIDokumen21 halamanOPTIMASI MINYAK NABATIFirmanJohannesMaruliTuaSimanullangBelum ada peringkat
- CLI-COMMANDDokumen4 halamanCLI-COMMANDOm GoenBelum ada peringkat
- Motor Kompon DCDokumen14 halamanMotor Kompon DCekoswie100% (1)
- OPTIMASI POWER WINDOWDokumen12 halamanOPTIMASI POWER WINDOWAjhy da QuintanaBelum ada peringkat
- SPD Motor PDFDokumen32 halamanSPD Motor PDFNAFIS ANDRIASBelum ada peringkat
- Teknik Listrik 1Dokumen215 halamanTeknik Listrik 1Frisco AndrogaBelum ada peringkat
- GENERATOR ACDokumen7 halamanGENERATOR ACyosaria oktariBelum ada peringkat
- Soal Kelistrikan TSM (Baterai)Dokumen6 halamanSoal Kelistrikan TSM (Baterai)Restu Pebriana100% (1)
- Motor Shaded Pole 1 FasaDokumen8 halamanMotor Shaded Pole 1 FasaNurAfandiAlhabsiBelum ada peringkat
- Sistem Kelistrikan Pada MotorDokumen3 halamanSistem Kelistrikan Pada MotorNonny Nindya KiranaBelum ada peringkat
- Pengantar Teknik PengaturanDokumen46 halamanPengantar Teknik PengaturanBoodee PrayBelum ada peringkat
- Rangkaian Warna Kabel Kiprok Semua Motor LengkapDokumen4 halamanRangkaian Warna Kabel Kiprok Semua Motor LengkapAmoz RobynzonBelum ada peringkat
- Skripsi-Perancangan Alat Pengering CabaiDokumen55 halamanSkripsi-Perancangan Alat Pengering Cabaianalyst_hard60% (5)
- LIQUID DETECTORDokumen9 halamanLIQUID DETECTORthobyBelum ada peringkat
- 9.3 Power SteeringDokumen18 halaman9.3 Power Steeringfitriambodo773Belum ada peringkat
- Jalan Arteri MadiunDokumen22 halamanJalan Arteri Madiunendro wibisonoBelum ada peringkat
- STRUKTURDokumen86 halamanSTRUKTURAgungPribadiBelum ada peringkat
- AVO METER DIGITALDokumen2 halamanAVO METER DIGITALAlul ScratchBelum ada peringkat
- Pedo Man PKL Pol Man BabelDokumen28 halamanPedo Man PKL Pol Man BabelRiki San IkiBelum ada peringkat
- Pengertian dan Penggunaan Motor Servo pada RobotDokumen9 halamanPengertian dan Penggunaan Motor Servo pada RobotBidinBelum ada peringkat
- OPTIMASI_SEO_MESIN_MOBILDokumen22 halamanOPTIMASI_SEO_MESIN_MOBILEdi IantoBelum ada peringkat
- Tutorial Inventor Stress AnalysisDokumen13 halamanTutorial Inventor Stress AnalysisafhamBelum ada peringkat
- Bab IiDokumen22 halamanBab IiTriedinda Syialylalosa ErmotrifirichBelum ada peringkat
- Pembuatan Fullwave Motor Grand Dan PengecekanDokumen27 halamanPembuatan Fullwave Motor Grand Dan PengecekanJuly Esa Putra100% (1)
- Teknik Mesin Industri Jilid-1Dokumen207 halamanTeknik Mesin Industri Jilid-1Iwan Ruhiyana100% (1)
- Motor DC Brushless Tiga Fasa-Satu KutubDokumen6 halamanMotor DC Brushless Tiga Fasa-Satu KutubMaula AhmadBelum ada peringkat
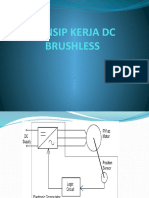
- Prinsip Kerja DC BrushlessDokumen23 halamanPrinsip Kerja DC BrushlessGhozi PratamBelum ada peringkat
- IL-2A - Makalah Presentasi K.3 (MOTOR DC BRUSHLESS)Dokumen16 halamanIL-2A - Makalah Presentasi K.3 (MOTOR DC BRUSHLESS)Elgaham RossianantoBelum ada peringkat
- Motor BLDCDokumen8 halamanMotor BLDCShandy SyahrizalBelum ada peringkat
- Tugas Laporan Motor BLDC Muhammad Yuski Firmansyah - LT2EDokumen11 halamanTugas Laporan Motor BLDC Muhammad Yuski Firmansyah - LT2EMuhammad Yuski FirmansyahBelum ada peringkat
- DC Motor BrushedDokumen11 halamanDC Motor BrushedOpikBelum ada peringkat
- 3.MAKALAH BLDC MotorDokumen15 halaman3.MAKALAH BLDC Motordanang karunia100% (1)
- BLDC Motor Bab 1Dokumen15 halamanBLDC Motor Bab 1GumilarHarsyaPutraBelum ada peringkat
- Bab Ii BLDCDokumen11 halamanBab Ii BLDCPratama Putra HpBelum ada peringkat
- MOTOR DC BRUSHLESSDokumen9 halamanMOTOR DC BRUSHLESSRisma Fauziyah RamadhaniBelum ada peringkat
- Limit FungsiDokumen8 halamanLimit FungsiLuthvi OkiariandiBelum ada peringkat
- Integral RangkapDokumen11 halamanIntegral RangkapMasri Nur SultanBelum ada peringkat
- Analisis Distribusi Tegangan Lebih Akibat Sambaran PetirDokumen5 halamanAnalisis Distribusi Tegangan Lebih Akibat Sambaran PetirMuhammad IrfanBelum ada peringkat
- Limit FungsiDokumen8 halamanLimit FungsiLuthvi OkiariandiBelum ada peringkat
- Bismillah Gillang.ADokumen8 halamanBismillah Gillang.ALuthvi OkiariandiBelum ada peringkat
- Chapter IIDokumen27 halamanChapter IIBahri IlmanBelum ada peringkat
- Contoh Soal Sistem ProteksiDokumen4 halamanContoh Soal Sistem ProteksiDeDe Caems100% (3)
- Flowchart Data Tidak KonstanDokumen1 halamanFlowchart Data Tidak KonstanLuthvi OkiariandiBelum ada peringkat
- Bab IDokumen4 halamanBab ILuthvi OkiariandiBelum ada peringkat
- Flowchart Data Tidak KonstanDokumen1 halamanFlowchart Data Tidak KonstanLuthvi OkiariandiBelum ada peringkat
- KOMPENASI SALURANDokumen15 halamanKOMPENASI SALURANLuthvi OkiariandiBelum ada peringkat