Anda mungkin juga menyukai
- 2022 Sensor-TransduserDokumen20 halaman2022 Sensor-TransduserMuhammad Saepul AnwarBelum ada peringkat
- Rangkuman Sistem KontrolDokumen3 halamanRangkuman Sistem Kontrolm sholeh apifBelum ada peringkat
- Penerapan Rangkaian ElektronikaDokumen28 halamanPenerapan Rangkaian ElektronikaBajak LautBelum ada peringkat
- Resistance Thermal DetectorDokumen17 halamanResistance Thermal DetectorAgung Seras PerdanaBelum ada peringkat
- Sensor Dan JenisnyaDokumen75 halamanSensor Dan Jenisnyayudi dopiBelum ada peringkat
- Mata Kuliah Sensor Dan TransduserDokumen27 halamanMata Kuliah Sensor Dan TransduserYunita RahmaBelum ada peringkat
- Kegiatan Pembelajaran 1: Komponen Sensor Dan Transduser: A. TujuanDokumen23 halamanKegiatan Pembelajaran 1: Komponen Sensor Dan Transduser: A. TujuanDede WahyuBelum ada peringkat
- Instrumen Angel - SalinDokumen36 halamanInstrumen Angel - SalinAngel SihotangBelum ada peringkat
- TransducerDokumen12 halamanTransducermunaf27Belum ada peringkat
- Resume Instrumentasi Sensor Dan TransduserDokumen4 halamanResume Instrumentasi Sensor Dan TransduserElok RahmawatiBelum ada peringkat
- SensorDokumen42 halamanSensorhanaBelum ada peringkat
- Paper Sensor Dan TranduserDokumen5 halamanPaper Sensor Dan TranduserDahlan Bima SaktiBelum ada peringkat
- Bab 1 Sensor Dan TransduserDokumen7 halamanBab 1 Sensor Dan TransduserDom TuyBelum ada peringkat
- PERTEMUAN-2 Sensor Dan TransduserDokumen11 halamanPERTEMUAN-2 Sensor Dan TransduserDhimasaryo SoedibyoBelum ada peringkat
- Sensor Dan TranduserDokumen21 halamanSensor Dan TranduserDanangBiantaraBelum ada peringkat
- Tinjauan Pustaka SensorDokumen3 halamanTinjauan Pustaka SensorMuhammad AkmalBelum ada peringkat
- Macam Macam Sensor Dan TranduserDokumen85 halamanMacam Macam Sensor Dan TranduserTaufik SupriyantoBelum ada peringkat
- Sensor Dan TranduserDokumen41 halamanSensor Dan Tranduserherta dwi septariBelum ada peringkat
- MAKALAH MEKATRONIKA SENSOR Dan AKTUATORDokumen9 halamanMAKALAH MEKATRONIKA SENSOR Dan AKTUATORirsad nurfiqriBelum ada peringkat
- Klasifikasi SensorDokumen9 halamanKlasifikasi SensorRandy HardiansyahBelum ada peringkat
- Sensor Dan TransduserDokumen19 halamanSensor Dan TransduserRosalinda LindaBelum ada peringkat
- Sensor Dan TransduserDokumen5 halamanSensor Dan TransduserArifuadinBelum ada peringkat
- Sensor Dan TranduserDokumen10 halamanSensor Dan TranduserHamzah AlfariziBelum ada peringkat
- Pengertian SensorDokumen22 halamanPengertian SensorNur Aini PBelum ada peringkat
- SensortranduserDokumen113 halamanSensortranduserAchmad ZajidBelum ada peringkat
- Tugas Materi Instrumentasi (Teknik Lingkungan)Dokumen3 halamanTugas Materi Instrumentasi (Teknik Lingkungan)Elisabeth SihotangBelum ada peringkat
- Pengenalan Sensor Dan TransduserDokumen6 halamanPengenalan Sensor Dan TransduserSatrio Adi SetiawanBelum ada peringkat
- Makalah Sensor Dan Trans DuserDokumen17 halamanMakalah Sensor Dan Trans DuserMuh. Jumhamsirul HerulBelum ada peringkat
- Sensor Dan TranduserDokumen32 halamanSensor Dan TranduserPrima WidyawatiBelum ada peringkat
- Pengukuran TeknikDokumen10 halamanPengukuran TeknikDIAN AGUS FIRMANBelum ada peringkat
- Makalah Sensor Dan TranduserDokumen26 halamanMakalah Sensor Dan Tranduserpopo siiipBelum ada peringkat
- Sensor Digital Dan AnalogDokumen11 halamanSensor Digital Dan AnalogDesty ZaharaBelum ada peringkat
- Makalah LVDTDokumen10 halamanMakalah LVDTChePhe StarGoodBelum ada peringkat
- Sensor & TransduserDokumen36 halamanSensor & TransduserRiel SiwabessyBelum ada peringkat
- Instrumentasi Sensor 130522113827 Phpapp01Dokumen50 halamanInstrumentasi Sensor 130522113827 Phpapp01Aris Purwanto WibowoBelum ada peringkat
- Ringkasan Pengantar Mekatronika Dan SensorDokumen5 halamanRingkasan Pengantar Mekatronika Dan SensorSamsulBelum ada peringkat
- JurnalDokumen30 halamanJurnalPijar Fitrah AbabilBelum ada peringkat
- Pendahuluan SensorDokumen25 halamanPendahuluan SensorHeri SubagiyoBelum ada peringkat
- Kurniawan Rizki Akbar - 03051282126047Dokumen2 halamanKurniawan Rizki Akbar - 03051282126047Kurniawan Rizki AkbarBelum ada peringkat
- Bahan Ajar PLCDokumen162 halamanBahan Ajar PLCbachtiar 119100% (1)
- Tugas 2 Sensor Dan Tranduser Yofa Mailani 17130027Dokumen21 halamanTugas 2 Sensor Dan Tranduser Yofa Mailani 17130027Shalva DilaBelum ada peringkat
- Makalah InduktosynDokumen10 halamanMakalah InduktosynAvet LogixBelum ada peringkat
- Sensor Merupakan Alat Yang Dapat Digunakan Untuk Mendeteksi SesuatuDokumen10 halamanSensor Merupakan Alat Yang Dapat Digunakan Untuk Mendeteksi SesuatuReynita RosidiBelum ada peringkat
- Tutorial 1 Sensor Dan TranduserDokumen14 halamanTutorial 1 Sensor Dan Tranduseraef agus sapariBelum ada peringkat
- Modul Praktikum Sensor Dan TransducerDokumen65 halamanModul Praktikum Sensor Dan Transducermartinus bagus wicaksonoBelum ada peringkat
- Modul Praktikum Sensor Dan TransducerDokumen64 halamanModul Praktikum Sensor Dan Transducer'Yogaga Setiawan'Belum ada peringkat
- Sensor 1REVDokumen53 halamanSensor 1REVratih28Belum ada peringkat
- Modul Praktikum Sensor Dan TransducerDokumen65 halamanModul Praktikum Sensor Dan Transducermartinus bagus wicaksonoBelum ada peringkat
- Sensor and Transducer 2013Dokumen118 halamanSensor and Transducer 2013martinus bagus wicaksonoBelum ada peringkat
- Sensor Dan TranduserDokumen39 halamanSensor Dan TranduserBudi HsnBelum ada peringkat
- SensorDokumen74 halamanSensorSinggih EzhioBelum ada peringkat
- Penelitian Universitas Sanata Dharma Tahun 2022Dokumen5 halamanPenelitian Universitas Sanata Dharma Tahun 2022martinus bagus wicaksonoBelum ada peringkat
- SURAT 019.WRI.F.I.2022 - Undangan Pembekalan FCH-2 Untuk DPA 2021 - 34022Dokumen1 halamanSURAT 019.WRI.F.I.2022 - Undangan Pembekalan FCH-2 Untuk DPA 2021 - 34022martinus bagus wicaksonoBelum ada peringkat
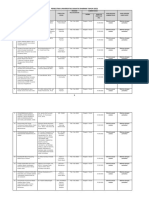
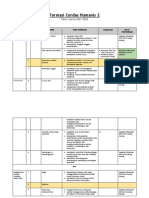
- 3 - FCH.2 - Matriks RancanganDokumen3 halaman3 - FCH.2 - Matriks Rancanganmartinus bagus wicaksonoBelum ada peringkat
- 04 Panduan Kegiatan Minggu IV (31 Januari &1-5 Februari 2022) Plan BDokumen16 halaman04 Panduan Kegiatan Minggu IV (31 Januari &1-5 Februari 2022) Plan Bmartinus bagus wicaksonoBelum ada peringkat
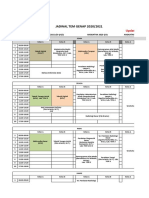
- Jadwal TPM GENAP 2022 Dan Kebutuhan LabDokumen15 halamanJadwal TPM GENAP 2022 Dan Kebutuhan Labmartinus bagus wicaksonoBelum ada peringkat