Anda mungkin juga menyukai
- Sistem Kendali Motor DCDokumen10 halamanSistem Kendali Motor DCazira_1989Belum ada peringkat
- Pengaturan Kecepatan Motor DC Menggunakan Kontrol PIDDokumen15 halamanPengaturan Kecepatan Motor DC Menggunakan Kontrol PIDAhmad WildanBelum ada peringkat
- Praktikum Sistem Kontrol DigitalDokumen9 halamanPraktikum Sistem Kontrol DigitaldilacantikBelum ada peringkat
- Kontrol Motor Menggunakan LQRDokumen7 halamanKontrol Motor Menggunakan LQRayou_smartBelum ada peringkat
- Tugas Pid Motor DCDokumen10 halamanTugas Pid Motor DCRandi SanutraBelum ada peringkat
- PRAKTIKUM 03 - Pratikum Kendali PDDokumen7 halamanPRAKTIKUM 03 - Pratikum Kendali PDAgnes AgithaBelum ada peringkat
- Sistem Kendali Kecepatan Motor DC Berbasis PWM (Group El-7)Dokumen9 halamanSistem Kendali Kecepatan Motor DC Berbasis PWM (Group El-7)fadjar_sensei100% (1)
- Konsep Dasar Kontrol PIDDokumen8 halamanKonsep Dasar Kontrol PIDSyaf HudaBelum ada peringkat
- Modul 3 DSPDokumen10 halamanModul 3 DSPilhamBelum ada peringkat
- Kendali Posisi Motor DCDokumen8 halamanKendali Posisi Motor DCyos_samudraBelum ada peringkat
- Laporan Pengaturan Kecepatan Motor DC Dengan Menggunakan MikrokontrolerDokumen4 halamanLaporan Pengaturan Kecepatan Motor DC Dengan Menggunakan Mikrokontrolerpenx2013Belum ada peringkat
- 13 - 3FD4TE - Muhammad Ali Akbar Febritama - Tugas Sistem Kendali Cerdas - 1Dokumen9 halaman13 - 3FD4TE - Muhammad Ali Akbar Febritama - Tugas Sistem Kendali Cerdas - 1D4TEMOH. YUSRON IRZA ANNAFIBelum ada peringkat
- KENDALI MOTOR DCDokumen5 halamanKENDALI MOTOR DCDion Adi Putra100% (1)
- Jurnal Rahmanda Fadri PDFDokumen8 halamanJurnal Rahmanda Fadri PDFRahmanda FadriBelum ada peringkat
- SISTEM KONTROL OROMATISDokumen12 halamanSISTEM KONTROL OROMATISJunaediBelum ada peringkat
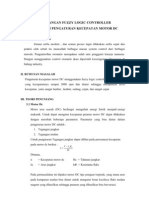
- Perancangan Fuzzy Logic Controller Motor DC - Uas 5Dokumen8 halamanPerancangan Fuzzy Logic Controller Motor DC - Uas 5FaisalBelum ada peringkat
- DC Chopper Bab 2 Landasan TeoriDokumen39 halamanDC Chopper Bab 2 Landasan TeorikennedyBelum ada peringkat
- CCCV CHARGE OPTIMIZATIONDokumen13 halamanCCCV CHARGE OPTIMIZATIONLuthfi MeidaniBelum ada peringkat
- Modul Praktikum 8Dokumen10 halamanModul Praktikum 8TsaniBelum ada peringkat
- Sistem Kendali Loop TertutupDokumen24 halamanSistem Kendali Loop TertutupLela Novi Mudiraharti100% (1)
- PidDokumen29 halamanPidsandrathepoohBelum ada peringkat
- DC Motor SpeedDokumen10 halamanDC Motor SpeedNurfajriani MuinnBelum ada peringkat
- Open Loop Controller Pada Sistem Timer Lampu Lalu LintasDokumen6 halamanOpen Loop Controller Pada Sistem Timer Lampu Lalu LintasArief Mail50% (2)
- SIMULASI AUTO-TUNING PIDDokumen38 halamanSIMULASI AUTO-TUNING PIDEry GunawanBelum ada peringkat
- LAPORANDokumen6 halamanLAPORANdevi maelaniBelum ada peringkat
- PID Controller Scuter ListrikDokumen8 halamanPID Controller Scuter ListrikAnip WidodoBelum ada peringkat
- Diagram Blok Pengaturan Kecepatan Motor DCDokumen11 halamanDiagram Blok Pengaturan Kecepatan Motor DCRizkie Denny PratamaBelum ada peringkat
- Tugas Akhir 1Dokumen8 halamanTugas Akhir 1Fauzan Ojan RahmanBelum ada peringkat
- Neural Network based Closed loop Kontrol Kecepatan Motor DC menggunakan Arduino UnoDokumen6 halamanNeural Network based Closed loop Kontrol Kecepatan Motor DC menggunakan Arduino UnoMuhammad Yusuf ThauziriBelum ada peringkat
- Referensi EAS Elda 2Dokumen9 halamanReferensi EAS Elda 2Yudha Aka Ardi Yudha Aka ArdiBelum ada peringkat
- Modul 2 Praktikum Sistem Kendali 2023Dokumen30 halamanModul 2 Praktikum Sistem Kendali 2023Nafiqul FajriBelum ada peringkat
- Joko Suprianto F44118071Dokumen8 halamanJoko Suprianto F44118071segah gamingBelum ada peringkat
- 05.2 Bab 2Dokumen17 halaman05.2 Bab 2rintosianturi10Belum ada peringkat
- El3215 01 18014007Dokumen5 halamanEl3215 01 18014007Donigo Fernando SinagaBelum ada peringkat
- Uas Teken YahdiDokumen7 halamanUas Teken YahdiYahdi Safa'at NasutionBelum ada peringkat
- Jurnal Sistem Kontrol PidDokumen16 halamanJurnal Sistem Kontrol PidDeka PramestaBelum ada peringkat
- MOTOR DC MODELDokumen16 halamanMOTOR DC MODELmomp100% (1)
- Jurnal PidDokumen11 halamanJurnal PidSelvia PratiwiBelum ada peringkat
- Sistem Kontrol Motor DC1Dokumen6 halamanSistem Kontrol Motor DC1ArieBelum ada peringkat
- SISO OPTIMASI MOTOR DCDokumen14 halamanSISO OPTIMASI MOTOR DCWidya Primaswari PutriBelum ada peringkat
- Muh. Aditya Wahyu N - 19612007 - LSKI Job-8 - Motor DCPID Dan DCProposionalDokumen17 halamanMuh. Aditya Wahyu N - 19612007 - LSKI Job-8 - Motor DCPID Dan DCProposionalMuhammad LuthfieBelum ada peringkat
- 06.2. SCAT Indonesia (Color)Dokumen3 halaman06.2. SCAT Indonesia (Color)BerlyYanuariNoerPrasusi100% (3)
- (Bahasa) SDS PERTAMINA ATF PDFDokumen14 halaman(Bahasa) SDS PERTAMINA ATF PDFGebbyMaulansyahBelum ada peringkat
- Tag OutDokumen1 halamanTag OutBerlyYanuariNoerPrasusiBelum ada peringkat
- SDS PertaliteDokumen11 halamanSDS Pertaliteguladigxx67% (3)
- Prosedur KedaruratanDokumen1 halamanProsedur KedaruratanBerlyYanuariNoerPrasusiBelum ada peringkat
- Perka Bapeten Tanda RadiasiDokumen40 halamanPerka Bapeten Tanda RadiasiIksan Adityo MulyoBelum ada peringkat
- Sop ScafholdingDokumen22 halamanSop ScafholdingYosuaBelum ada peringkat
- Pentingnya Safety Talk Pada Proyek KonstruksiDokumen1 halamanPentingnya Safety Talk Pada Proyek KonstruksiBerlyYanuariNoerPrasusiBelum ada peringkat
- Kendali Servo Menggunakan ArduinoDokumen3 halamanKendali Servo Menggunakan ArduinoBerlyYanuariNoerPrasusiBelum ada peringkat
- Keamanan Dan Keselamatan Saat Bekerja Dengan ListrikDokumen2 halamanKeamanan Dan Keselamatan Saat Bekerja Dengan ListrikBerlyYanuariNoerPrasusiBelum ada peringkat
- Tip Keselamatan Kerja ListrikDokumen1 halamanTip Keselamatan Kerja ListrikBerlyYanuariNoerPrasusiBelum ada peringkat
- Tersengat ListrikDokumen2 halamanTersengat ListrikBerlyYanuariNoerPrasusiBelum ada peringkat
- Sop RadiographiDokumen4 halamanSop RadiographiBerlyYanuariNoerPrasusiBelum ada peringkat
- IntroductionDokumen7 halamanIntroductionBerlyYanuariNoerPrasusiBelum ada peringkat
- Perka 1-2010 Kesiapsiagaan Dan Penanggulangan Kedaruratan NuklirDokumen56 halamanPerka 1-2010 Kesiapsiagaan Dan Penanggulangan Kedaruratan NuklirBerlyYanuariNoerPrasusiBelum ada peringkat
- UUPLTNDokumen46 halamanUUPLTNBerlyYanuariNoerPrasusiBelum ada peringkat
- Bab II PorosDokumen44 halamanBab II PorosBerlyYanuariNoerPrasusiBelum ada peringkat
- PLC LADDERDokumen14 halamanPLC LADDERDaniel NainggolandBelum ada peringkat