Anda mungkin juga menyukai
- Akhirnya SeleseDokumen17 halamanAkhirnya SeleseM Rizal RBelum ada peringkat
- 4708 - 21 Yahya Abdurrozaq - Sistem Pengukuran Beban Lift Menggunakan Sensor ProximityDokumen51 halaman4708 - 21 Yahya Abdurrozaq - Sistem Pengukuran Beban Lift Menggunakan Sensor ProximitychristianBelum ada peringkat
- Pembangkit Switching Regulators Tegangan Dengan IC TL494Dokumen18 halamanPembangkit Switching Regulators Tegangan Dengan IC TL494Denny Indra PurnamaBelum ada peringkat
- PROFIL DESA SENAMA NENEK (Achmad)Dokumen3 halamanPROFIL DESA SENAMA NENEK (Achmad)Mochamad AdriantoBelum ada peringkat
- Langkah Membuat Simulasi Di PsimDokumen7 halamanLangkah Membuat Simulasi Di Psimahmad zakiBelum ada peringkat
- Surat KeluarDokumen1 halamanSurat KeluarShofa SyukurBelum ada peringkat
- Blok Diagram TV WarnaDokumen31 halamanBlok Diagram TV WarnaGus Win Ibnu SufjanBelum ada peringkat
- 1.formulir Ska IntakindoDokumen7 halaman1.formulir Ska IntakindoFadhiel100% (1)
- Macam-Macam Asas Alat UkurDokumen12 halamanMacam-Macam Asas Alat Ukurbayu PrasetyoBelum ada peringkat
- Form Permohonan Izin Instalasi ListrikDokumen1 halamanForm Permohonan Izin Instalasi Listrikeni wulandariBelum ada peringkat
- Laporan4 09011281924065Dokumen6 halamanLaporan4 09011281924065Warga DesaBelum ada peringkat
- Modul Praktikum ElektronikaDokumen17 halamanModul Praktikum ElektronikaKurniawan Tirta AjiBelum ada peringkat
- Uji TransistorDokumen4 halamanUji TransistorchulenkBelum ada peringkat
- 9330buku Matriks Vektor Dan Terapannya 2Dokumen143 halaman9330buku Matriks Vektor Dan Terapannya 2Suci MayveraBelum ada peringkat
- SLD Up3 JayapuraDokumen73 halamanSLD Up3 JayapuraDito Adhi PutraBelum ada peringkat
- Jobsheet Danas 2Dokumen11 halamanJobsheet Danas 2MikkunBelum ada peringkat
- Kinematika Differential Wheels RobotDokumen15 halamanKinematika Differential Wheels RobotDedy Slamet RiyadiBelum ada peringkat
- Soal UNAR Siaga Pancasila 2003Dokumen16 halamanSoal UNAR Siaga Pancasila 2003Abinsa Marwabin100% (1)
- Jurnal Rancang Bangun Prototipe Buka Tutup Gerbang PDFDokumen6 halamanJurnal Rancang Bangun Prototipe Buka Tutup Gerbang PDFomkumissBelum ada peringkat
- List Kebutuhan Live Streaming Dan ProyektorDokumen1 halamanList Kebutuhan Live Streaming Dan ProyektorRenol SiscoBelum ada peringkat
- Bab IvDokumen23 halamanBab IvBang's BenzBelum ada peringkat
- UAS Robotika 2014Dokumen1 halamanUAS Robotika 2014Chaeriah WaelBelum ada peringkat
- Klasifikasi Logika ElektronikaDokumen34 halamanKlasifikasi Logika Elektronikaradim21Belum ada peringkat
- Direct LF-1 PDFDokumen6 halamanDirect LF-1 PDFbayuBelum ada peringkat
- Jaringan Komputer Menggunakan Protokol TCP / IPDokumen17 halamanJaringan Komputer Menggunakan Protokol TCP / IPGilang MaulanaBelum ada peringkat
- Buku Robotika Part3Dokumen140 halamanBuku Robotika Part3Bagusaryowibowo WibowoBelum ada peringkat
- 21-Soal latihan-BEP - SeleksiDokumen2 halaman21-Soal latihan-BEP - SeleksiMuhammad IqbalBelum ada peringkat
- Elektrolisa AirDokumen4 halamanElektrolisa Airmujayanah100% (1)
- SOP - Instalasi Perangkat Network SPBU Koneksi Astinet 1.1Dokumen24 halamanSOP - Instalasi Perangkat Network SPBU Koneksi Astinet 1.1Farhan HadiyantoBelum ada peringkat
- F.TKJ-35 Kartu Riwayat Mesin Atau PeralatanDokumen1 halamanF.TKJ-35 Kartu Riwayat Mesin Atau PeralatanDanny KurnawanBelum ada peringkat
- Rotary EncoderDokumen21 halamanRotary EncoderMochamad Ghifar IqramullahBelum ada peringkat
- Jasa Desain Mesin, Simulasi Dan Animasi Autodesk Inventor, Solidwork MalangDokumen17 halamanJasa Desain Mesin, Simulasi Dan Animasi Autodesk Inventor, Solidwork MalangdidinBelum ada peringkat
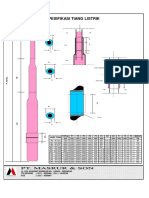
- Osur Tiang Listrik PDFDokumen1 halamanOsur Tiang Listrik PDFAri Setya ArnoBelum ada peringkat
- Jawablah PertanyaanDokumen3 halamanJawablah PertanyaanYohanez Bayu P PBelum ada peringkat
- Alat Ukur Dan Teknik PengukuranDokumen263 halamanAlat Ukur Dan Teknik PengukuranBudi IstanaBelum ada peringkat
- Routing ModulDokumen11 halamanRouting ModulDian SeptianaBelum ada peringkat
- Encoding Data Bits Menggunakan Linear Block Code Encoder Dalam Simulink Prak - TekDokumen5 halamanEncoding Data Bits Menggunakan Linear Block Code Encoder Dalam Simulink Prak - Tekjayadamanik100% (1)
- Modul Praktikum Elektronika MedisDokumen38 halamanModul Praktikum Elektronika MedisWidi WiduraiBelum ada peringkat
- Mengatur Kecepatan Motor DC Dengan PWMDokumen5 halamanMengatur Kecepatan Motor DC Dengan PWMDewi MustabsyirahBelum ada peringkat
- PROYEK 2 RANGKAIN PENDETEKSI KABEL PUTUS FixsDokumen16 halamanPROYEK 2 RANGKAIN PENDETEKSI KABEL PUTUS FixsIlqham FirmanzyahBelum ada peringkat
- MAKALAH Motor AcDokumen10 halamanMAKALAH Motor AcnabilasouzanBelum ada peringkat
- Cara Kerja KWH Meter AnalogDokumen5 halamanCara Kerja KWH Meter AnalogummamasofyanaBelum ada peringkat
- Alat Kontrol Kompresor Cold Storage Berbasis IoTDokumen21 halamanAlat Kontrol Kompresor Cold Storage Berbasis IoTAhmad Ulin NuhaBelum ada peringkat
- 7 - Redaman Tetap Gelombang MikroDokumen7 halaman7 - Redaman Tetap Gelombang MikroTri UtamiBelum ada peringkat
- Perancangan Dan Analisis Otomasi Sistem Kendali Quadcopter Melalui Koordinat Dengan Global Positioning System TrackerDokumen87 halamanPerancangan Dan Analisis Otomasi Sistem Kendali Quadcopter Melalui Koordinat Dengan Global Positioning System TrackerHabibie GhaniBelum ada peringkat
- Daftar Nama Penerima Pemkab Tahun 2021 3 KategoriDokumen11 halamanDaftar Nama Penerima Pemkab Tahun 2021 3 KategoriImmaBelum ada peringkat
- Contoh Laporan KPDokumen39 halamanContoh Laporan KPMuhammad Faizal Mustakaim100% (1)
- ST-08 Saluran Transmisi PanjangDokumen35 halamanST-08 Saluran Transmisi Panjangandkprtm53Belum ada peringkat
- Dokumen Pengadaan Suku Cadang Peralatan Elektronika, Komunikasi Dan Listrik Penerbangan (II)Dokumen141 halamanDokumen Pengadaan Suku Cadang Peralatan Elektronika, Komunikasi Dan Listrik Penerbangan (II)Parlin AmbaritaBelum ada peringkat
- Teknik ElektroDokumen151 halamanTeknik ElektroMarwanto Bagus PermadiBelum ada peringkat
- 7 Bab IiDokumen28 halaman7 Bab IialtiafathBelum ada peringkat
- Makalah Rangkaian Elektronika SederhanaDokumen9 halamanMakalah Rangkaian Elektronika Sederhanamuyunscribd67% (3)
- TM 01 Pengantar RobotikaDokumen47 halamanTM 01 Pengantar RobotikaM FebriansyahBelum ada peringkat
- Cheat Kode Dragon Age 2Dokumen32 halamanCheat Kode Dragon Age 2Benks PriyatnaBelum ada peringkat
- Laporan Praktek Elektronika TerapanDokumen14 halamanLaporan Praktek Elektronika TerapanBATHITUSTA CEASARIO mhsD4TEM2019BBelum ada peringkat
- Inspeksi K3 Dan Perlengkapan K3 PLTS - Kelompok 1Dokumen29 halamanInspeksi K3 Dan Perlengkapan K3 PLTS - Kelompok 1mainul qulubiBelum ada peringkat
- Inspeksi PLTS PNJDokumen21 halamanInspeksi PLTS PNJmainul qulubiBelum ada peringkat
- Control Servo Dengan PotensioDokumen5 halamanControl Servo Dengan PotensioGadhang SunuBelum ada peringkat
- Unit 5 Pembangkit GelombangDokumen4 halamanUnit 5 Pembangkit GelombangJejak LangkahBelum ada peringkat