Anda mungkin juga menyukai
- Mode Komunikasi SerialDokumen14 halamanMode Komunikasi SerialdwiSumarti_arty dwiBelum ada peringkat
- Komunikasi Serial Pada MCS 51Dokumen5 halamanKomunikasi Serial Pada MCS 51brincyBelum ada peringkat
- PrakMikroD3 6Dokumen13 halamanPrakMikroD3 6Iqbal RamadhanBelum ada peringkat
- Komunikasi SerialDokumen5 halamanKomunikasi SerialMuhamad Anugrah HadiyanaBelum ada peringkat
- Pertemuan 11 Komunikasi Mikrokontroller 89c51 Dengan KomputerDokumen27 halamanPertemuan 11 Komunikasi Mikrokontroller 89c51 Dengan KomputerAl Dinnul AidaBelum ada peringkat
- Bab 2 - InterfacingDokumen23 halamanBab 2 - InterfacingMohammad RofiiBelum ada peringkat
- Makalah Komunikasi Data Serial Dan ParalaelDokumen27 halamanMakalah Komunikasi Data Serial Dan Paralaelariesta9932100% (1)
- 6 TAK - Komunikasi SerialDokumen29 halaman6 TAK - Komunikasi SerialAgatha RamaBelum ada peringkat
- Putri Nurul Faiqoh - 2 D3 LA - LP Prak4Dokumen5 halamanPutri Nurul Faiqoh - 2 D3 LA - LP Prak4Putri NurulBelum ada peringkat
- Komunikasi SerialDokumen25 halamanKomunikasi SerialIbnu KhaldunBelum ada peringkat
- Makalah Komunikasi SerialDokumen13 halamanMakalah Komunikasi Serial092Mutmainnah TulhadawiahBelum ada peringkat
- Bab 7 Interface Serial USARTDokumen16 halamanBab 7 Interface Serial USARTKevin ScakillersBelum ada peringkat
- Pemograman Mikrokontroller Minggu 7Dokumen36 halamanPemograman Mikrokontroller Minggu 7affan0% (1)
- PM710 Dan PM1200 Fix-1Dokumen36 halamanPM710 Dan PM1200 Fix-1andoBelum ada peringkat
- Laporan InterfaceDokumen44 halamanLaporan InterfaceMuhammad Yusuf IrdandyBelum ada peringkat
- Modul V Komunikasi UsartDokumen8 halamanModul V Komunikasi UsartMuha IlmiyBelum ada peringkat
- Serial Port Computer & Pemrogramannya Dengan VB6.0Dokumen12 halamanSerial Port Computer & Pemrogramannya Dengan VB6.0evhyajahBelum ada peringkat
- STT MK 12, CodingDokumen20 halamanSTT MK 12, CodingErwin MalikBelum ada peringkat
- Muhammad Fahreza Nurhidayat - KOMUNIKASI SERIALDokumen8 halamanMuhammad Fahreza Nurhidayat - KOMUNIKASI SERIALJunaediBelum ada peringkat
- Makalah Komunikasi SerialDokumen15 halamanMakalah Komunikasi SerialMuhammad Akmal ShaufiBelum ada peringkat
- Komunikasi SerialDokumen19 halamanKomunikasi SerialAshari_jasonBelum ada peringkat
- Antarmuka SerialDokumen4 halamanAntarmuka SerialOlivia Dwi ParwitaBelum ada peringkat
- Komunikasi PC To PCDokumen13 halamanKomunikasi PC To PCellenesmonoBelum ada peringkat
- Laporan Usart AyuDokumen40 halamanLaporan Usart AyuAinnur Rahayu PratiwiBelum ada peringkat
- Bab 05 Komunikasi Serial PDFDokumen8 halamanBab 05 Komunikasi Serial PDFErlistaGitaOktaviliaBelum ada peringkat
- Laporan PC To PCDokumen21 halamanLaporan PC To PCmuhammad vianBelum ada peringkat
- T3 Pengkodean DataDokumen50 halamanT3 Pengkodean DataMuhammad Andyk MaulanaBelum ada peringkat
- LAPORAN PRAKTIKUM Pak Sarosa (Alisha)Dokumen29 halamanLAPORAN PRAKTIKUM Pak Sarosa (Alisha)alisha100% (1)
- Laporan InterfaceDokumen36 halamanLaporan InterfacenenengimasBelum ada peringkat
- Lecture-KD 03 Data EncodingDokumen13 halamanLecture-KD 03 Data EncodingJimmi NadapdapBelum ada peringkat
- Laporan UsartDokumen48 halamanLaporan UsartAinnur Rahayu PratiwiBelum ada peringkat
- PPTDokumen15 halamanPPTfarah faurizBelum ada peringkat
- Bab 3 - Pengkodean DataDokumen15 halamanBab 3 - Pengkodean DataDenia WonkyuBelum ada peringkat
- Serial ATMega8535Dokumen48 halamanSerial ATMega8535Cahyo SnBelum ada peringkat
- LaporanDokumen10 halamanLaporanBhayz SituyaBelum ada peringkat
- Percobaan 3 Pengukuran Komunikasi SerialDokumen4 halamanPercobaan 3 Pengukuran Komunikasi SerialdodheepeermhadheeBelum ada peringkat
- Modbus (UTS)Dokumen6 halamanModbus (UTS)Adam SatrioBelum ada peringkat
- Prak 11Dokumen9 halamanPrak 11Afiv SetyajiBelum ada peringkat
- Laporan MID 2 Komunikasi SerialDokumen35 halamanLaporan MID 2 Komunikasi SerialayuasterBelum ada peringkat
- Laporan Mikrokontroler USARTDokumen16 halamanLaporan Mikrokontroler USARTNanda PutriBelum ada peringkat
- Makalah EncodingDokumen17 halamanMakalah EncodingFahmi FedererBelum ada peringkat
- Makalah Enconding Data (Untad) PDFDokumen11 halamanMakalah Enconding Data (Untad) PDFamri_nur_rahim_gokilBelum ada peringkat
- Makalah Sonet SDHDokumen24 halamanMakalah Sonet SDHZeki SaragihBelum ada peringkat
- Bab 2 RS232Dokumen8 halamanBab 2 RS232aisya mutia syafiiBelum ada peringkat
- Bab Ii Landasan Teori: Real-Time Clock (RTC)Dokumen49 halamanBab Ii Landasan Teori: Real-Time Clock (RTC)Hery Saragih AndyBelum ada peringkat
- PJK 05Dokumen26 halamanPJK 05Rahersa SecretBelum ada peringkat
- Praktikum III DelphiDokumen25 halamanPraktikum III DelphiMysteriusman100% (2)
- Tachometer OptikDokumen19 halamanTachometer OptikKhom 'Akrom'Belum ada peringkat
- Krisna Maria Rosita Dewi - RS 232, RS 485, SDI 12, Dan I2CDokumen6 halamanKrisna Maria Rosita Dewi - RS 232, RS 485, SDI 12, Dan I2CkalebBelum ada peringkat
- MODUL Va KOMUNIKASI USART - SimulasiDokumen12 halamanMODUL Va KOMUNIKASI USART - SimulasiDimas PrasBelum ada peringkat
- Transmisi DigitalDokumen6 halamanTransmisi Digital-zainal Aishide Cibhil-100% (1)
- BAB04 - Port I/O Mikrokontroler MCS51Dokumen11 halamanBAB04 - Port I/O Mikrokontroler MCS51cakMAD69Belum ada peringkat
- Port SerialDokumen53 halamanPort SerialRidho MulyaworoBelum ada peringkat
- Laporan Praktikum 3 Komunikasi DataDokumen25 halamanLaporan Praktikum 3 Komunikasi DataFajrin JauhariBelum ada peringkat
- m20 SerialDokumen17 halamanm20 SerialFrankBelum ada peringkat
- SKB - Pemeriksaan Fisik Dan KesehatanDokumen6 halamanSKB - Pemeriksaan Fisik Dan KesehatanHardiknas We Save ForesterBelum ada peringkat
- SKB - Pemeriksaan Fisik Dan KesehatanDokumen6 halamanSKB - Pemeriksaan Fisik Dan KesehatanHardiknas We Save ForesterBelum ada peringkat
- Contoh Soal Psikotes Kerja Dan JawabanDokumen13 halamanContoh Soal Psikotes Kerja Dan JawabanIwan Van DieselBelum ada peringkat
- ID Pemakzulan Presidenwakil Presiden Menuru PDFDokumen14 halamanID Pemakzulan Presidenwakil Presiden Menuru PDFmirzaBelum ada peringkat
- Surat Pengakuan Hutang KupedesDokumen10 halamanSurat Pengakuan Hutang KupedesmirzaBelum ada peringkat
- Tapmpr VDokumen12 halamanTapmpr VmirzaBelum ada peringkat
- Contoh Soal Psikotes Kerja Dan JawabanDokumen13 halamanContoh Soal Psikotes Kerja Dan JawabanIwan Van DieselBelum ada peringkat
- Laporan Resmi Percobaan Kapasitor BankDokumen9 halamanLaporan Resmi Percobaan Kapasitor BankmirzaBelum ada peringkat
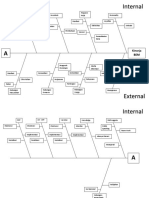
- Revisi Fish Bone BEMDokumen4 halamanRevisi Fish Bone BEMmirzaBelum ada peringkat
- Kesalahan Berfikir (Fix) FINISHDokumen15 halamanKesalahan Berfikir (Fix) FINISHmirzaBelum ada peringkat
- Bab IiDokumen10 halamanBab IimirzaBelum ada peringkat
- Pengguna Smartphone Di Indonesia 2016 2019Dokumen1 halamanPengguna Smartphone Di Indonesia 2016 2019mirzaBelum ada peringkat
- R Amandemen UUD KM PENSDokumen13 halamanR Amandemen UUD KM PENSmirzaBelum ada peringkat
- Tugas Mata Kuliah K3LDokumen11 halamanTugas Mata Kuliah K3LmirzaBelum ada peringkat
- Buku Laporan Kerja Paktek PT Barata Indonesia GresikDokumen69 halamanBuku Laporan Kerja Paktek PT Barata Indonesia Gresikmirza100% (1)
- Pid Control MatlabDokumen12 halamanPid Control MatlabJackk SparoowwBelum ada peringkat