Anda mungkin juga menyukai
- Laporan Rangkaian Digital ClockDokumen9 halamanLaporan Rangkaian Digital ClockKaban la Soal0% (1)
- Membuat Sendiri Frekuensi Meter DigitalDokumen2 halamanMembuat Sendiri Frekuensi Meter DigitalZainal Abidin100% (1)
- Pemeriksaan RefrigeranDokumen13 halamanPemeriksaan RefrigeranuntungbasukiBelum ada peringkat
- Scrolling Text Pada Led Dot MatrixDokumen13 halamanScrolling Text Pada Led Dot Matrixayoenx100% (1)
- Modul Elektronika Terapan2013Dokumen54 halamanModul Elektronika Terapan2013AlexanderNugrohoBelum ada peringkat
- TEKNOLOGI HIJAUDokumen15 halamanTEKNOLOGI HIJAUEva Kristin Manihuruk0% (1)
- Elektronika IndustriDokumen12 halamanElektronika IndustriSITI MUKHALIFAHBelum ada peringkat
- MIKROKONTROLERDokumen104 halamanMIKROKONTROLERDwiki Abdul RohmanBelum ada peringkat
- LKPD-TPMM Ke2Dokumen5 halamanLKPD-TPMM Ke2Wildan Programer100% (1)
- Lampiran RPP TPMMDokumen19 halamanLampiran RPP TPMMMULTIMEDIA SKANSABelum ada peringkat
- Modul Praktikum Sistem Kontrol FixDokumen20 halamanModul Praktikum Sistem Kontrol FixWahyu Dwi HartartoBelum ada peringkat
- Tutorial Avrstudio+AvrgccDokumen78 halamanTutorial Avrstudio+AvrgccVerry Cahyadi100% (1)
- AC Inverter Mengatur KompresorDokumen2 halamanAC Inverter Mengatur KompresorBramantyo Krisdito AdiBelum ada peringkat
- Web Contoh Toko Online - ERD Dan Analisis Sistem Informasi Penjualan Buku Online v1 Untuk Contoh TA Dan Skripsi InformatikaDokumen8 halamanWeb Contoh Toko Online - ERD Dan Analisis Sistem Informasi Penjualan Buku Online v1 Untuk Contoh TA Dan Skripsi InformatikaBunafit Nugroho, S.Kom100% (1)
- SILABUS ELEKTRONIKADokumen3 halamanSILABUS ELEKTRONIKAUjang KbmBelum ada peringkat
- Kartu Soal Pilihan Ganda UAS TPMMDokumen40 halamanKartu Soal Pilihan Ganda UAS TPMMAgung SetyonoBelum ada peringkat
- Laporan Penguat InstrumenDokumen7 halamanLaporan Penguat InstrumenhendraBelum ada peringkat
- Semikonduktor Daya ElektronikaDokumen12 halamanSemikonduktor Daya ElektronikaAbi AzanoBelum ada peringkat
- Kaldik, PME, Prota, PromesDokumen12 halamanKaldik, PME, Prota, PromesAngga Panca Alam AnugrahBelum ada peringkat
- Job Sheet Lampu Berjalan MikroarduinoDokumen2 halamanJob Sheet Lampu Berjalan MikroarduinoMULTIMEDIA SKANSABelum ada peringkat
- Buku Ajar Rangkaian Listrik II EditingDokumen54 halamanBuku Ajar Rangkaian Listrik II EditingRohana FitriBelum ada peringkat
- SOAL TPMMDokumen4 halamanSOAL TPMMahkhotibBelum ada peringkat
- Komunikasi Serial Mikrokontroler Dengan PCDokumen8 halamanKomunikasi Serial Mikrokontroler Dengan PCrecoverryBelum ada peringkat
- Metode Mind MapingDokumen9 halamanMetode Mind MapingIvan Wahyu RamadhanBelum ada peringkat
- Sensor Dan TransduserDokumen24 halamanSensor Dan TransduserEl DarudBelum ada peringkat
- 2.prinsip Dan Aplikasi RelayDokumen40 halaman2.prinsip Dan Aplikasi RelayMuhamad Finda MustofaBelum ada peringkat
- Ac Controller Elektronika DayaDokumen6 halamanAc Controller Elektronika DayaAdlia DifriantiBelum ada peringkat
- Makalah Motor Dan Generator IndustriDokumen41 halamanMakalah Motor Dan Generator IndustriAfid Agita67% (3)
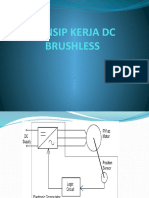
- Prinsip Kerja DC BrushlessDokumen23 halamanPrinsip Kerja DC BrushlessGhozi PratamBelum ada peringkat
- Makalah CycloconverterDokumen13 halamanMakalah CycloconverterYoga Tri WarmenBelum ada peringkat
- Penyearah 3 Fasa PDFDokumen6 halamanPenyearah 3 Fasa PDFMuhammad Rizky AkbarBelum ada peringkat
- Mengatur Putaran Motor AcDokumen8 halamanMengatur Putaran Motor AcDany handi prasetyo100% (1)
- Kendali Tegangan ACDokumen10 halamanKendali Tegangan ACMuhammad Iqbal FathurahmanBelum ada peringkat
- KONTROL TEGANGAN ACDokumen2 halamanKONTROL TEGANGAN ACRizal Syestem Off DownBelum ada peringkat
- Pengendalian Motor DC Dengan Metode PWMDokumen15 halamanPengendalian Motor DC Dengan Metode PWMMeutia RahmahBelum ada peringkat
- DC DRIVEDokumen25 halamanDC DRIVEChristian Bate'eBelum ada peringkat
- Antarmuka Modul Driver Motor DC L298N Dengan ArduinoDokumen27 halamanAntarmuka Modul Driver Motor DC L298N Dengan ArduinouyuniBelum ada peringkat
- Soft Starter and Soft Stop SequenceDokumen6 halamanSoft Starter and Soft Stop Sequenceajisetyo1990Belum ada peringkat
- Makalah AC AC KonverterDokumen10 halamanMakalah AC AC KonverterMuhammad Rizki RifanoBelum ada peringkat
- Pengertian GeneratorDokumen12 halamanPengertian GeneratorFadhla XemenBelum ada peringkat
- Presentasi Elektronika Daya CycloconverterDokumen8 halamanPresentasi Elektronika Daya CycloconverterDanis WaraBelum ada peringkat
- Kereta ListrikDokumen8 halamanKereta ListrikJopang ZulafaBelum ada peringkat
- OhmeterDokumen7 halamanOhmetersheiiBelum ada peringkat
- PWM Motor KontrolDokumen14 halamanPWM Motor KontrolanangBelum ada peringkat
- Dasar Vsd-1Dokumen13 halamanDasar Vsd-1Sherli WidiastutiBelum ada peringkat
- Arya Winara Tugas1 Teori SisdalDokumen9 halamanArya Winara Tugas1 Teori SisdalArya Winara SaputraBelum ada peringkat
- Saklar StatisDokumen11 halamanSaklar StatisRijal Al FatihBelum ada peringkat
- Induction Generator Controller (IGC)Dokumen15 halamanInduction Generator Controller (IGC)elmek jayaBelum ada peringkat
- Cyclo ConverterDokumen19 halamanCyclo ConverterMonalisa Putri UtamaBelum ada peringkat
- PP 6Dokumen22 halamanPP 6Yoakim MoraBelum ada peringkat
- Makalah Elday Kelompok 9Dokumen11 halamanMakalah Elday Kelompok 9Rio YudhistiraBelum ada peringkat
- Tugas Elda Lanjut Konverter 3 FasaDokumen12 halamanTugas Elda Lanjut Konverter 3 FasaMuhammad Ilham WH Al-BalawiBelum ada peringkat
- Studi Penggunaan Nearpod Sebagai Arus Listrik AcDokumen11 halamanStudi Penggunaan Nearpod Sebagai Arus Listrik AcIlfi Nur DianaBelum ada peringkat
- AlternatorDokumen9 halamanAlternatorkfi MandianginBelum ada peringkat
- Cyclo ConverterDokumen19 halamanCyclo ConverterPutu Suwis Andhi YasaBelum ada peringkat
- InverterDokumen5 halamanInverterWiwin WinardiBelum ada peringkat
- Pengaturan Kecepatan Motor Induksi DG Variasi Tegangan Dan Frekuensi Berbasis MikrokontrollerDokumen6 halamanPengaturan Kecepatan Motor Induksi DG Variasi Tegangan Dan Frekuensi Berbasis MikrokontrollerPatrick StarFishBelum ada peringkat
- 1 SMDokumen6 halaman1 SMPutu PrastaBelum ada peringkat
- Makalah Elektronika DayaDokumen12 halamanMakalah Elektronika DayaAtmosphere-Belum ada peringkat
- OPTIMASI TRIAC UNTUK KONTROL DAYA ACDokumen14 halamanOPTIMASI TRIAC UNTUK KONTROL DAYA ACzero okBelum ada peringkat