Anda mungkin juga menyukai
- Tes KetelitianDokumen3 halamanTes KetelitiannurimaBelum ada peringkat
- Time Schedule OktoberDokumen32 halamanTime Schedule OktoberBayu Aditya SubiyantoBelum ada peringkat
- MODULPRAKTIKUM Web 2 Cetak by DedihDokumen107 halamanMODULPRAKTIKUM Web 2 Cetak by DedihAny WulandariBelum ada peringkat
- Proposal Website Company ProfileDokumen18 halamanProposal Website Company ProfileDikhi MartinBelum ada peringkat
- 2.3.6 Ep.1 SK Visi, Misi, Tujuan Dan Tata Nilai PuskesmasDokumen3 halaman2.3.6 Ep.1 SK Visi, Misi, Tujuan Dan Tata Nilai PuskesmaspusianBelum ada peringkat
- Universitas Sumatera UtaraDokumen112 halamanUniversitas Sumatera Utaramovic 21Belum ada peringkat
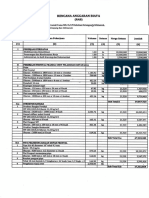
- Rencana Anggaran BiayaDokumen3 halamanRencana Anggaran BiayaGalih RahmanBelum ada peringkat
- Fotografi HPDokumen3 halamanFotografi HPSukma Lavoisier Al-ChemieBelum ada peringkat
- Chip 11 2002 PDFDokumen165 halamanChip 11 2002 PDFomahbukuBelum ada peringkat
- Chip 06 2005Dokumen155 halamanChip 06 2005Teguh JozsBelum ada peringkat
- Litmas As An Abdul Hadi SudiyonoDokumen13 halamanLitmas As An Abdul Hadi SudiyonoRauf SutriantoBelum ada peringkat
- Chip Digital 01 2002Dokumen157 halamanChip Digital 01 2002Jeffy Dwi LoenetoBelum ada peringkat
- MAJALAH HSI-009-lowresDokumen66 halamanMAJALAH HSI-009-lowresherypurw0879Belum ada peringkat
- Majalahhsi 006 HiresDokumen73 halamanMajalahhsi 006 HiresJajang ZaelaniBelum ada peringkat
- Dokumen Pengembangan Produk B100-B500Dokumen9 halamanDokumen Pengembangan Produk B100-B500DanurilhamBelum ada peringkat
- CNC Router-Instruksi 1Dokumen6 halamanCNC Router-Instruksi 1Novi WidyaBelum ada peringkat
- Informatika: Andi NoviantoDokumen5 halamanInformatika: Andi Noviantoblugriin pedia100% (1)
- KERTAS KERJA 1 - Pemasangan GitDokumen11 halamanKERTAS KERJA 1 - Pemasangan GitMuhamad Hazriel HariezBelum ada peringkat
- majalahHSI Edisi30Dokumen23 halamanmajalahHSI Edisi30Adra TobiangBelum ada peringkat
- Kertas Penerangan 3Dokumen7 halamanKertas Penerangan 3Siti FarahanaBelum ada peringkat
- 7.detail Meja Pajang Dan Neon BoxDokumen1 halaman7.detail Meja Pajang Dan Neon Boxmikel L .RusanBelum ada peringkat
- Manual CNCDokumen10 halamanManual CNCArie KurniawanBelum ada peringkat
- Pedoman Gambar IMBDokumen19 halamanPedoman Gambar IMBDualDuelBelum ada peringkat
- Quotation Kopi Dari Hati Dalung NewDokumen3 halamanQuotation Kopi Dari Hati Dalung NewDarma Yudha100% (1)
- TEKNOLOGI JARINGAN BERBASIS LUAS WAN Kelas XI PDFDokumen33 halamanTEKNOLOGI JARINGAN BERBASIS LUAS WAN Kelas XI PDFDani Dragneel100% (1)
- Kayu Gaharu Papua, Manfaat Kayu Gaharu, 085643699889Dokumen28 halamanKayu Gaharu Papua, Manfaat Kayu Gaharu, 085643699889Kayu Gaharu AsliBelum ada peringkat
- Undangan Karunia NewDokumen1 halamanUndangan Karunia Newklinik karunia husadaBelum ada peringkat
- Rab GapuraDokumen264 halamanRab GapuraSLAMETBelum ada peringkat
- Visi Misi Bagian HumasDokumen2 halamanVisi Misi Bagian HumasRaheKosmikBelum ada peringkat
- Manual Book Videotron RusunawaDokumen11 halamanManual Book Videotron RusunawaDadan RamdaniBelum ada peringkat
- Aprointerior Design Proposal Penawaran #Design InteriorDokumen10 halamanAprointerior Design Proposal Penawaran #Design InteriorAtep KhozinBelum ada peringkat
- CP CKRDokumen6 halamanCP CKRTerra Octavyanii100% (1)
- CNCDokumen25 halamanCNCSatria BetawiBelum ada peringkat
- Laporan Keuangan Pt. Aspro Eco Agroindo - Januari 2016Dokumen456 halamanLaporan Keuangan Pt. Aspro Eco Agroindo - Januari 2016FatkhurrokhmanBelum ada peringkat
- 11 - Teknik Membuat Surat PenawaranDokumen17 halaman11 - Teknik Membuat Surat PenawaranAhmad JauzaBelum ada peringkat
- Materi SA Nissan-Follow UpDokumen8 halamanMateri SA Nissan-Follow Upjoko wardoyoBelum ada peringkat
- Boq GapuraDokumen31 halamanBoq GapuraKristopher LewisBelum ada peringkat
- RockyDokumen79 halamanRockyDewi MartaBelum ada peringkat
- Adm 02 - Penawaran Potong Rumput Golf Zona 2 - 02Dokumen8 halamanAdm 02 - Penawaran Potong Rumput Golf Zona 2 - 02batara wajo123Belum ada peringkat
- Kesiapan Industri Hijau Dan Infrastruktur Jasa Industri Hijau Untuk Mengakselerasi Pencapaian Komitmen Indonesia Untuk Penurunan Emisi Gas Rumah KacaDokumen11 halamanKesiapan Industri Hijau Dan Infrastruktur Jasa Industri Hijau Untuk Mengakselerasi Pencapaian Komitmen Indonesia Untuk Penurunan Emisi Gas Rumah KacaRoman CardBelum ada peringkat
- Kesimpulan MeetingDokumen7 halamanKesimpulan MeetingAnafi NingsihBelum ada peringkat
- Harga Scaffolding PipaDokumen13 halamanHarga Scaffolding PipaRahayu AuliaBelum ada peringkat
- Majalah Catlovers Edisi1Dokumen78 halamanMajalah Catlovers Edisi1Fajar ApriliantiBelum ada peringkat
- Rab Lift LokalDokumen5 halamanRab Lift LokalNaseh Ya NasehBelum ada peringkat
- Standar Operasional ProsedurDokumen17 halamanStandar Operasional ProsedurNounna IjahhBelum ada peringkat
- AanwijzingDokumen5 halamanAanwijzingchandraBelum ada peringkat
- Rps 15Dokumen11 halamanRps 15diah WidnyasariBelum ada peringkat
- Berhitung Biaya Pembuatan Aplikasi MobileDokumen3 halamanBerhitung Biaya Pembuatan Aplikasi Mobilerifqi100% (1)
- Cara Paling Mudah Dalam Membuat Pelet ApungDokumen3 halamanCara Paling Mudah Dalam Membuat Pelet ApungNisma FauziyahBelum ada peringkat
- Brosur FurnitureDokumen1 halamanBrosur FurnitureYoni AhmadBelum ada peringkat
- Overview PermenLHK Nomor 8 Tahun 2021 Pak InoDokumen18 halamanOverview PermenLHK Nomor 8 Tahun 2021 Pak InoFutayBelum ada peringkat
- Dewi Dedew Rieka - Anak Kos Dodol (Ig-@Free - Book12)Dokumen122 halamanDewi Dedew Rieka - Anak Kos Dodol (Ig-@Free - Book12)mdprtw pratiwiBelum ada peringkat
- Upah Pasang GranitDokumen5 halamanUpah Pasang GranitDidik SulistyaBelum ada peringkat
- Gerobak SampahDokumen16 halamanGerobak SampahMulyadi TompulBelum ada peringkat
- Langsung File Dan Tutorial Sketchup Di Blog Http://tutorial-Sketchup-Indonesia - Blogspot.comDokumen22 halamanLangsung File Dan Tutorial Sketchup Di Blog Http://tutorial-Sketchup-Indonesia - Blogspot.comArhi Ajah OiBelum ada peringkat
- Kontrak Kerja Borongan Pembangunan Rumah - Paket Pekerjaan Pemasangan Baja Ringan + Aluminium FoilDokumen4 halamanKontrak Kerja Borongan Pembangunan Rumah - Paket Pekerjaan Pemasangan Baja Ringan + Aluminium Foilhot maBelum ada peringkat
- Pengumuman Lulus SNMPTN 2011Dokumen34 halamanPengumuman Lulus SNMPTN 2011Adi SyahBelum ada peringkat
- Modul Pelatihan Praktik Teknik Digital Dengan Software ProteusDokumen28 halamanModul Pelatihan Praktik Teknik Digital Dengan Software ProteusIman TrianBelum ada peringkat
- (Dasmik) (DN) (5) Rafi' Muhammad NaufalDokumen12 halaman(Dasmik) (DN) (5) Rafi' Muhammad NaufalRafi WebBelum ada peringkat
- Laporan Final Project Komunikasi Data (Papan Score Pertandingan Basket Dengan Timer Dan Buzzer)Dokumen11 halamanLaporan Final Project Komunikasi Data (Papan Score Pertandingan Basket Dengan Timer Dan Buzzer)Darma KusumandaruBelum ada peringkat