Anda mungkin juga menyukai
- Hengky Engineering - En.idDokumen47 halamanHengky Engineering - En.idindra ratuamaBelum ada peringkat
- SMKN2KURIPANDokumen16 halamanSMKN2KURIPANsun_ardyBelum ada peringkat
- Biografi Charles Augustin de CoulombDokumen2 halamanBiografi Charles Augustin de CoulombSiti MariahBelum ada peringkat
- Kinematika Robot MobilDokumen34 halamanKinematika Robot MobilLulu Ain'nun GayatriBelum ada peringkat
- PERSIAPAN_TESDokumen2 halamanPERSIAPAN_TESMUHAMMAD SAFWANBelum ada peringkat
- Terjemahan Imature Platelet FractionDokumen16 halamanTerjemahan Imature Platelet FractionDiian Eka PutriBelum ada peringkat
- Soal Try Out TKA SaintekDokumen9 halamanSoal Try Out TKA SaintekRiskiani AksanBelum ada peringkat
- Fisika PAT 2018-2019Dokumen4 halamanFisika PAT 2018-2019Irfan (Anak Naburju)Belum ada peringkat
- Tutorial 1.1 Himpunan Dan OperasinyaDokumen18 halamanTutorial 1.1 Himpunan Dan OperasinyaGandi SumantaBelum ada peringkat
- FullDokumen74 halamanFullDEFRIDANDI mhsD4TEM2019BBelum ada peringkat
- Untuk Mengerjakan 1 Unit Rumah Dibutuhkan Waktu 36 Hari Dengan 12 Tenaga KerjaDokumen1 halamanUntuk Mengerjakan 1 Unit Rumah Dibutuhkan Waktu 36 Hari Dengan 12 Tenaga KerjaAll In OneBelum ada peringkat
- Kisi-Kisi Try Out Matematika 2016-2017Dokumen11 halamanKisi-Kisi Try Out Matematika 2016-2017Afarit RomadhanBelum ada peringkat
- Listrik Dinamis SoalDokumen1 halamanListrik Dinamis SoalDikdik Handayani0% (1)
- Paket 35 Manfaat RadioisotopDokumen3 halamanPaket 35 Manfaat RadioisotopHeryanto TahirBelum ada peringkat
- (ITTelkom PWT) Laporan Praktikum Rangkaian Listrik Modul I - IVDokumen47 halaman(ITTelkom PWT) Laporan Praktikum Rangkaian Listrik Modul I - IVMuhammad Fathurrohman NurBelum ada peringkat
- Aljabar Boolean 2016Dokumen77 halamanAljabar Boolean 2016Kelvin IceBelum ada peringkat
- MUX-DEMUXDokumen7 halamanMUX-DEMUXtutu darlingBelum ada peringkat
- Bab11 DokumenDokumen16 halamanBab11 DokumenListya Ratna50% (2)
- Penalaran UmumDokumen13 halamanPenalaran UmumNayaaBelum ada peringkat
- Soal Latihan Bidang Studi Saintek 378Dokumen14 halamanSoal Latihan Bidang Studi Saintek 378Naufal AzrizalBelum ada peringkat
- UJIAN AKHIRDokumen2 halamanUJIAN AKHIRQOLFAN ARFI PRASETYABelum ada peringkat
- ElastisitasDokumen4 halamanElastisitasClara AngelinaBelum ada peringkat
- Tutorial - 4 - Sistem Bilangan RealDokumen19 halamanTutorial - 4 - Sistem Bilangan RealtiginrahmaBelum ada peringkat
- 5694 - Soal Sipencatar 2018 Tegal RPDokumen29 halaman5694 - Soal Sipencatar 2018 Tegal RPAliyyan MahfudBelum ada peringkat
- Rumah Sakit Umum Daerah DR Moewardi Dalam Rangka Meningkatkan PelayananDokumen8 halamanRumah Sakit Umum Daerah DR Moewardi Dalam Rangka Meningkatkan Pelayananwidya.efrinestinaBelum ada peringkat
- Zat RadioaktifDokumen5 halamanZat RadioaktifAurum Argentum FerrumBelum ada peringkat
- Panduan TA Dan Tesis FMIPA 2018 FinalDokumen128 halamanPanduan TA Dan Tesis FMIPA 2018 FinalMohd Iqbal MuttaqinBelum ada peringkat
- Dr. Windarwati, SP - PKDokumen90 halamanDr. Windarwati, SP - PKAnonymous 4f6gdEnGBelum ada peringkat
- Atlas Anatomi Topografi Veteriner Dog (Anjing)Dokumen37 halamanAtlas Anatomi Topografi Veteriner Dog (Anjing)Putry SedaBelum ada peringkat
- SEJARAH MESIN PERKAKASDokumen16 halamanSEJARAH MESIN PERKAKASRidhoSyahputraBelum ada peringkat
- Teori Nebula dalam Pembentukan Tata SuryaDokumen11 halamanTeori Nebula dalam Pembentukan Tata Suryatry_aji868880Belum ada peringkat
- Tiu Soal 3Dokumen5 halamanTiu Soal 3Nadyarahma KartikaPutriBelum ada peringkat
- Clock GeneratorDokumen14 halamanClock GeneratorArga IrawanBelum ada peringkat
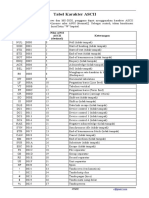
- Tabel Karakter AsciiDokumen5 halamanTabel Karakter Asciitiara delimaBelum ada peringkat
- Desain Struktur SupramolekulDokumen25 halamanDesain Struktur SupramolekulEdy SudrajatBelum ada peringkat
- SBMPTN SOAL TPS 8Dokumen6 halamanSBMPTN SOAL TPS 8Zandi SaniBelum ada peringkat
- OXYGEN CONCENTRATORDokumen9 halamanOXYGEN CONCENTRATORdianBelum ada peringkat
- Rute Pelayanan BRT Trans Semarang Koridor I SD VIII Update 1 November 2018Dokumen11 halamanRute Pelayanan BRT Trans Semarang Koridor I SD VIII Update 1 November 2018Windi TbaBelum ada peringkat
- C++ - Anak Ayam TurunDokumen1 halamanC++ - Anak Ayam Turungung_tensai55160% (1)
- UAS 1 Materi Kelas 12 BiologiDokumen4 halamanUAS 1 Materi Kelas 12 BiologiMuhammad Irfaan100% (1)
- Web-Pdf-8 Nov 2021 09.29.16Dokumen7 halamanWeb-Pdf-8 Nov 2021 09.29.16Faizal Mahfudh AriandiBelum ada peringkat
- SPO Pengelolaan Limbah Radioaktif Di Kedokteran NuklirDokumen9 halamanSPO Pengelolaan Limbah Radioaktif Di Kedokteran NuklirBhoncel InginhilangingatanBelum ada peringkat
- Bab 5 Fungsi, Fungsi Invers, Dan Komposisi FungsiDokumen75 halamanBab 5 Fungsi, Fungsi Invers, Dan Komposisi FungsijokyBelum ada peringkat
- Bank Soal Biomedik 1DDokumen10 halamanBank Soal Biomedik 1DEsterfina Early Sidney RumimpunuBelum ada peringkat
- Automatic Film ProcessingDokumen32 halamanAutomatic Film ProcessingGenta EftaBelum ada peringkat
- Pembahasan Simulasi 1 Tiu-Tpa PDFDokumen14 halamanPembahasan Simulasi 1 Tiu-Tpa PDFAmrih AlamBelum ada peringkat
- 9 Oktober 2023. NOTA DINAS EDARAN BEASISWA PRESTASI AKADEMIK SMT GENAP TA.2022-2023Dokumen4 halaman9 Oktober 2023. NOTA DINAS EDARAN BEASISWA PRESTASI AKADEMIK SMT GENAP TA.2022-2023Putri Adelia Mayasari24Belum ada peringkat
- Latihan Tata CahayaDokumen1 halamanLatihan Tata CahayaAnnisa SaraswatiBelum ada peringkat
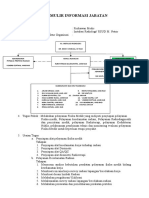
- Anjab Fisika MedisDokumen5 halamanAnjab Fisika Medisradiologi rsud solokBelum ada peringkat
- Potensiometer Sebagai Sensor Sudut Pada GimbalDokumen14 halamanPotensiometer Sebagai Sensor Sudut Pada GimbalSavira Ferdiana SariBelum ada peringkat
- Rancang Bangun Underwater Robot Sebagai Alat Bantu EksplorasiDokumen12 halamanRancang Bangun Underwater Robot Sebagai Alat Bantu EksplorasiRizwan Rifa'iBelum ada peringkat
- Operasi Geometri CitraDokumen8 halamanOperasi Geometri CitraTikaBelum ada peringkat
- Macam Macam CipherDokumen4 halamanMacam Macam CipherYan'sAlMunthelym100% (2)
- Bab Vii Sistem Dengan Umpan Balik Dan KestabilanDokumen7 halamanBab Vii Sistem Dengan Umpan Balik Dan KestabilanBondan TristantyoBelum ada peringkat
- Kuis 1-10 - TimticingDokumen75 halamanKuis 1-10 - TimticingIlham RizkiansyahBelum ada peringkat
- XRFDokumen4 halamanXRFMawar SantikaBelum ada peringkat
- Tata Letak Rangkaian PneumatikDokumen8 halamanTata Letak Rangkaian PneumatikHiiezBelum ada peringkat
- Bab I. Sylabus and IntroductionDokumen56 halamanBab I. Sylabus and IntroductionSarah KharismawatiBelum ada peringkat
- Sejarah Perkembangan RobotDokumen12 halamanSejarah Perkembangan Robotsiluanus terbit100% (1)
- SEJARAH ROBOT PENDEKDokumen27 halamanSEJARAH ROBOT PENDEKask ATVBelum ada peringkat
- 01 Surat Permohonan Dana Webinar GameDokumen1 halaman01 Surat Permohonan Dana Webinar GameLulu Ain'nun GayatriBelum ada peringkat
- 12 Surat Peminjaman LabDokumen2 halaman12 Surat Peminjaman LabLulu Ain'nun GayatriBelum ada peringkat
- 10 Surat Undangan Ketua Mapala TimbalDokumen1 halaman10 Surat Undangan Ketua Mapala TimbalLulu Ain'nun GayatriBelum ada peringkat
- 11 Surat Undangan Ketua PBKDokumen1 halaman11 Surat Undangan Ketua PBKLulu Ain'nun GayatriBelum ada peringkat
- 13 Surat Undangan Pak Rio Andriyat Krisdiawan, S.Kom, M.KomDokumen1 halaman13 Surat Undangan Pak Rio Andriyat Krisdiawan, S.Kom, M.KomLulu Ain'nun GayatriBelum ada peringkat
- Undangan WebinarDokumen1 halamanUndangan WebinarLulu Ain'nun GayatriBelum ada peringkat
- 08 Surat Undangan Ketua Hima DKVDokumen1 halaman08 Surat Undangan Ketua Hima DKVLulu Ain'nun GayatriBelum ada peringkat
- Webinar GamemakerDokumen1 halamanWebinar GamemakerLulu Ain'nun GayatriBelum ada peringkat
- 07 Surat Undangan Ketua Hima SIDokumen1 halaman07 Surat Undangan Ketua Hima SILulu Ain'nun GayatriBelum ada peringkat
- 05 Surat Undangan Sekprodi TIDokumen1 halaman05 Surat Undangan Sekprodi TILulu Ain'nun GayatriBelum ada peringkat
- 06 Surat Undangan Ketua BEM FKomDokumen1 halaman06 Surat Undangan Ketua BEM FKomLulu Ain'nun GayatriBelum ada peringkat
- Lulu Ain'Nun Gayatri - Modul 1-10 - TI2018BDokumen70 halamanLulu Ain'Nun Gayatri - Modul 1-10 - TI2018BLulu Ain'nun Gayatri100% (1)
- 05 Surat Undangan Sekprodi TIDokumen1 halaman05 Surat Undangan Sekprodi TILulu Ain'nun GayatriBelum ada peringkat
- Kontrol Robot Mobil PIDDokumen38 halamanKontrol Robot Mobil PIDLulu Ain'nun GayatriBelum ada peringkat
- Pertemuan 4 - Kinematika Maju Robot ManipulatorDokumen15 halamanPertemuan 4 - Kinematika Maju Robot ManipulatorLulu Ain'nun GayatriBelum ada peringkat
- Kuliah 2 Deskripsi Ruang Dan Pergerakan PDFDokumen20 halamanKuliah 2 Deskripsi Ruang Dan Pergerakan PDFhanif mahendra100% (1)
- Pertemuan 3 - Transformasi HomogenDokumen12 halamanPertemuan 3 - Transformasi HomogenLulu Ain'nun GayatriBelum ada peringkat
- Pertemuan 4 - Kinematika Maju Robot ManipulatorDokumen15 halamanPertemuan 4 - Kinematika Maju Robot ManipulatorLulu Ain'nun GayatriBelum ada peringkat