0% menganggap dokumen ini bermanfaat (0 suara)
352 tayangan23 halamanRobot Line Follower: Prinsip dan Komponen
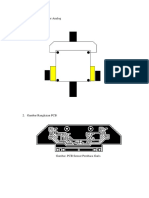
Dokumen tersebut membahas tentang desain robot pengikut garis sederhana menggunakan sensor cahaya, transistor, motor DC, dan mikrokontroler. Tujuan dari proyek ini adalah mempelajari prinsip kerja komponen-komponen elektronik dasar dan mampu merancang robot pengikut garis analog.
Diunggah oleh
YuliaAngrainiSamosirHak Cipta
© © All Rights Reserved
Kami menangani hak cipta konten dengan serius. Jika Anda merasa konten ini milik Anda, ajukan klaim di sini.
Format Tersedia
Unduh sebagai DOCX, PDF, TXT atau baca online di Scribd
0% menganggap dokumen ini bermanfaat (0 suara)
352 tayangan23 halamanRobot Line Follower: Prinsip dan Komponen
Dokumen tersebut membahas tentang desain robot pengikut garis sederhana menggunakan sensor cahaya, transistor, motor DC, dan mikrokontroler. Tujuan dari proyek ini adalah mempelajari prinsip kerja komponen-komponen elektronik dasar dan mampu merancang robot pengikut garis analog.
Diunggah oleh
YuliaAngrainiSamosirHak Cipta
© © All Rights Reserved
Kami menangani hak cipta konten dengan serius. Jika Anda merasa konten ini milik Anda, ajukan klaim di sini.
Format Tersedia
Unduh sebagai DOCX, PDF, TXT atau baca online di Scribd