Anda mungkin juga menyukai
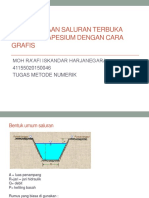
- Perencanaan Penampang Saluran Drainase Bentuk Trapesium Dengan CaraDokumen8 halamanPerencanaan Penampang Saluran Drainase Bentuk Trapesium Dengan CaraRaafi Iskandar Harjanegara100% (2)
- Laporan 2 Pak Arip Job 3Dokumen11 halamanLaporan 2 Pak Arip Job 3RidwanBelum ada peringkat
- Laporan 5 Praktek Sistem Kendali Kontinyu MFQDokumen12 halamanLaporan 5 Praktek Sistem Kendali Kontinyu MFQRidwanBelum ada peringkat
- Matlab 2Dokumen10 halamanMatlab 2RidwanBelum ada peringkat
- Faris - Metode Komputasi 2021 UASDokumen9 halamanFaris - Metode Komputasi 2021 UASFaris zulkarnainBelum ada peringkat
- Tugas Besar: Program Studi D3 Teknik Kimia Jurusan Teknik Kimia Politeknik Negeri Bandung 2020Dokumen12 halamanTugas Besar: Program Studi D3 Teknik Kimia Jurusan Teknik Kimia Politeknik Negeri Bandung 2020PutriBelum ada peringkat
- Hitungan PPSHDokumen7 halamanHitungan PPSHMay sijabatBelum ada peringkat
- Perencanaan Penampang Saluran Drainase Bentuk Trapesium Dengan CaraDokumen8 halamanPerencanaan Penampang Saluran Drainase Bentuk Trapesium Dengan CaraRobertus PareBelum ada peringkat
- Perencanaan Penampang Saluran Drainase Bentuk Trapesium Dengan CaraDokumen8 halamanPerencanaan Penampang Saluran Drainase Bentuk Trapesium Dengan CaraRaafi Iskandar HarjanegaraBelum ada peringkat
- Acc P-T DIAGRAMDokumen11 halamanAcc P-T DIAGRAMYayat Orhaq UmarBelum ada peringkat
- Acc P-T DIAGRAMDokumen12 halamanAcc P-T DIAGRAMHardiana AmirBelum ada peringkat
- Cover MAKALAH KimfisDokumen35 halamanCover MAKALAH KimfisFauzan HantoroBelum ada peringkat
- Laporan 11 Sementara Praktikum Sistem Kendali - Nancy Sholihat - 1901042053Dokumen11 halamanLaporan 11 Sementara Praktikum Sistem Kendali - Nancy Sholihat - 1901042053Nancy SholihatBelum ada peringkat
- Soal Dan Penyelesaian Regresi LinearDokumen21 halamanSoal Dan Penyelesaian Regresi LinearGabriella ArdhyaBelum ada peringkat
- Rizki Dwi Ananda - 2ega - Uas - NumerikDokumen9 halamanRizki Dwi Ananda - 2ega - Uas - NumerikKiki KikiBelum ada peringkat
- Bahas Soal Pas Tahun 2019Dokumen14 halamanBahas Soal Pas Tahun 2019Titi IstiqomahBelum ada peringkat
- BAB IV Pelimah Emergency Debit 1Dokumen17 halamanBAB IV Pelimah Emergency Debit 1Muhammad Bagus Hari SantosoBelum ada peringkat
- Latihan Responsi 2Dokumen26 halamanLatihan Responsi 2alfiqriyansyah 119330091Belum ada peringkat
- Kumpulan Soal Dan Jawaban Analisis Sistem Tenaga Listrik Bab 8Dokumen20 halamanKumpulan Soal Dan Jawaban Analisis Sistem Tenaga Listrik Bab 8Arief Kurniawan50% (4)
- 2 Ral Ulangan Sama BDokumen7 halaman2 Ral Ulangan Sama BLa FitraBelum ada peringkat
- Prob 8 Dan Prob 9Dokumen9 halamanProb 8 Dan Prob 9Daning Kinanti SutamaBelum ada peringkat
- PerhitunganDokumen11 halamanPerhitunganRinaldi PelawiBelum ada peringkat
- Pengolahan Data SFDokumen14 halamanPengolahan Data SFEvan Fadhil NurhakimBelum ada peringkat
- Non Logam-1Dokumen30 halamanNon Logam-1ChandraBelum ada peringkat
- Revisi Lapres7 - E1 - 22-228 - Aldo Yehezkiel SiregarDokumen15 halamanRevisi Lapres7 - E1 - 22-228 - Aldo Yehezkiel SiregarKhresna Anugrah Ksatria PBelum ada peringkat
- Pertemuan-14.2 - Stationing & VolumeDokumen18 halamanPertemuan-14.2 - Stationing & VolumeulfarahmiBelum ada peringkat
- Fungsi Multi VariabelDokumen38 halamanFungsi Multi VariabelImroatu SholihahBelum ada peringkat
- 2022-10-06 Tugas UTS Oleh Bagus FirmansyahDokumen10 halaman2022-10-06 Tugas UTS Oleh Bagus FirmansyahBagus FirmansyahBelum ada peringkat
- Mencari EtoDokumen10 halamanMencari EtoMuhammad RidhaBelum ada peringkat
- Tugas KinetikaDokumen8 halamanTugas KinetikaFaisal ZBelum ada peringkat
- 04 Evapotranspirasi - EtpDokumen17 halaman04 Evapotranspirasi - EtpAdhitya Gilang IrawantoBelum ada peringkat
- RADIASI THERmaniaDokumen7 halamanRADIASI THERmaniaahsanul gamerzBelum ada peringkat
- Lab Report Fizik Kapasitor Dan Pemalar Masa PPISMP 2Dokumen7 halamanLab Report Fizik Kapasitor Dan Pemalar Masa PPISMP 2khairaiman100% (3)
- Reaktor Fixed Bed 1Dokumen38 halamanReaktor Fixed Bed 1Rachmad Darmawan EnsaBelum ada peringkat
- Soalan Akhir Tahun Matematik Tingkatan 4Dokumen15 halamanSoalan Akhir Tahun Matematik Tingkatan 4Muhamad Fadli Harun0% (1)
- Lembar Kerja Praktikum Nomor 4Dokumen4 halamanLembar Kerja Praktikum Nomor 4Siti RikayantiBelum ada peringkat
- 62d11d8c95a70 Uas Perpindahan PanasDokumen6 halaman62d11d8c95a70 Uas Perpindahan PanasAnugrah BayuBelum ada peringkat
- Rancangan Bujur Sangkar Latin (RBSL)Dokumen13 halamanRancangan Bujur Sangkar Latin (RBSL)Jusran RindingBelum ada peringkat
- Laporan Pilot Plant DistilasiDokumen8 halamanLaporan Pilot Plant DistilasinyanmaruBelum ada peringkat
- Lalu LintasDokumen24 halamanLalu Lintasfaskal gemilangBelum ada peringkat
- Contoh Perhitungan Alternatif 1 Dan 2Dokumen25 halamanContoh Perhitungan Alternatif 1 Dan 2Ikmal LamkiBelum ada peringkat
- Tugas PemrogamanDokumen9 halamanTugas PemrogamanIstiqomah 02Belum ada peringkat
- Uas 1-3Dokumen6 halamanUas 1-3Pedro AndhikaBelum ada peringkat
- Trs PH 2Dokumen11 halamanTrs PH 2Rindang Isnaniar Wisnu AjiBelum ada peringkat
- Kuliah Ke 5 - RalDokumen27 halamanKuliah Ke 5 - RalAlloy Eginta GintingBelum ada peringkat
- Refrigerasi Dan Pengkondisian UdaraDokumen213 halamanRefrigerasi Dan Pengkondisian UdaraIka Bayu RamadhanaBelum ada peringkat
- Pertemuan 1-3Dokumen17 halamanPertemuan 1-3aka laBelum ada peringkat
- Ujian Tengah Semester LapterDokumen20 halamanUjian Tengah Semester Lapteranjing bodokBelum ada peringkat
- Bab IiiDokumen11 halamanBab IiiNopril rozza WaidanalBelum ada peringkat
- BackUp SOAL UP 2021 - 05-09-21Dokumen9 halamanBackUp SOAL UP 2021 - 05-09-21Iqmal HikmalBelum ada peringkat
- MODUL 3 Formulasi Masalah InversiDokumen8 halamanMODUL 3 Formulasi Masalah InversiIkaaBelum ada peringkat
- Solusi Po 2 KimiaDokumen5 halamanSolusi Po 2 KimiaanwarBelum ada peringkat
- Kompresor 1 C-01Dokumen3 halamanKompresor 1 C-01Naufal MuflihBelum ada peringkat
- Bab 3 Persamaan KeadaanDokumen51 halamanBab 3 Persamaan Keadaanca2n27Belum ada peringkat
- Modul PDFDokumen29 halamanModul PDFcantikBelum ada peringkat
- Lapresmodul 7Dokumen41 halamanLapresmodul 7Mr JhoeBelum ada peringkat
- Partai 2Dokumen19 halamanPartai 2Arul WahdahuBelum ada peringkat
- Modul Teknik Reaksi KimiaDokumen33 halamanModul Teknik Reaksi KimiandwiandiniBelum ada peringkat