Anda mungkin juga menyukai
- RANCANG BANGUN PENGENDALI LAMPU DAN PINTU FTTHDokumen93 halamanRANCANG BANGUN PENGENDALI LAMPU DAN PINTU FTTHismalia18Belum ada peringkat
- OPTIMASI PABXDokumen46 halamanOPTIMASI PABXAchmadMardiyansyahArdhy0% (1)
- SISTEM UTILITASDokumen5 halamanSISTEM UTILITASnana luBelum ada peringkat
- ANALISIS PENERANGAN AUDITORIUMDokumen18 halamanANALISIS PENERANGAN AUDITORIUMhandoko anggoroBelum ada peringkat
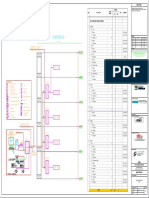
- Ec-104-Diagram Sistem Bas (Planetarium)Dokumen1 halamanEc-104-Diagram Sistem Bas (Planetarium)Adli Yaumil HakimBelum ada peringkat
- Rancang Bangun Turbin PeltonDokumen11 halamanRancang Bangun Turbin Pelton131711010 Rizal IrwansyahBelum ada peringkat
- MESIN PENGHILANG KACANGDokumen66 halamanMESIN PENGHILANG KACANGBayu SaputtBelum ada peringkat
- Setting OGR & OCGR PDFDokumen10 halamanSetting OGR & OCGR PDFDicky FirmansyahBelum ada peringkat
- Instalasi PipaDokumen3 halamanInstalasi PipaImam Fitriadi100% (1)
- Lift-Sarana Transportasi VertikalDokumen68 halamanLift-Sarana Transportasi VertikalRidho Sugiharto100% (1)
- SKKNI Kepmentrans 2009-297 Ahli Pesawat Lift Dan Eskalator PDFDokumen54 halamanSKKNI Kepmentrans 2009-297 Ahli Pesawat Lift Dan Eskalator PDFYudhi Munandar HarahapBelum ada peringkat
- MATV Digital dan AnalogDokumen7 halamanMATV Digital dan AnalogYessy ADBelum ada peringkat
- Perencanaan Instalasi ListrikDokumen5 halamanPerencanaan Instalasi ListrikFadlyGraferBelum ada peringkat
- Definisi Arus AC Dan DCDokumen6 halamanDefinisi Arus AC Dan DCSyaf TanjungBelum ada peringkat
- Permen ESDM 13 2012Dokumen14 halamanPermen ESDM 13 2012Sri Wahyuni SebayangBelum ada peringkat
- Instalasi Telepon GedungDokumen10 halamanInstalasi Telepon GedungPaula Qori RosyatinBelum ada peringkat
- Penangkal PetirDokumen4 halamanPenangkal PetirDardakBelum ada peringkat
- RANCANG ESPDokumen13 halamanRANCANG ESPAchmad YukrisnaBelum ada peringkat
- Spesifikasi Teknis Sistem PlumbingDokumen6 halamanSpesifikasi Teknis Sistem PlumbingHaris Asta PradanaBelum ada peringkat
- Alat Berat Konstruksi SipilDokumen23 halamanAlat Berat Konstruksi SipilLola MaharaniBelum ada peringkat
- Cara Uji Pompa Rotodinamik - SNI 7518 - 2009 PDFDokumen44 halamanCara Uji Pompa Rotodinamik - SNI 7518 - 2009 PDFAdjie PurwonoBelum ada peringkat
- Proses MAnufaktur Pengelasan DLLDokumen48 halamanProses MAnufaktur Pengelasan DLLeka aulia mustikawatiBelum ada peringkat
- ELEKTROPLATING ARUSDokumen6 halamanELEKTROPLATING ARUSandirahmawan99Belum ada peringkat
- BUKU INFORMASI AHLI KELAIKAN FUNGSI ELEKTRIKALDokumen31 halamanBUKU INFORMASI AHLI KELAIKAN FUNGSI ELEKTRIKALSriwahyuni Busura100% (1)
- KERANGKA ACUAN KERJA Genset Edit4 PDFDokumen4 halamanKERANGKA ACUAN KERJA Genset Edit4 PDFalfredhoBelum ada peringkat
- Berbagai Macam Merk LiftDokumen4 halamanBerbagai Macam Merk LiftPanji Prasetya Angela100% (1)
- Laporan Design Mep-ADokumen1 halamanLaporan Design Mep-AKurniaBelum ada peringkat
- Elektroplating 3 PDFDokumen7 halamanElektroplating 3 PDFSERAPHINEBelum ada peringkat
- MEMBAHAS SISTEM PLAMBINGDokumen3 halamanMEMBAHAS SISTEM PLAMBINGDwi Sartika100% (1)
- PERENCANAAN ATS 100 KvADokumen3 halamanPERENCANAAN ATS 100 KvAtomi tintiaBelum ada peringkat
- Materi CCTVDokumen7 halamanMateri CCTVMiftahol FadliBelum ada peringkat
- Sistem Telepon RumahDokumen13 halamanSistem Telepon Rumahahmad aminBelum ada peringkat
- RANCANG BANGUN UJI VENTILATORDokumen93 halamanRANCANG BANGUN UJI VENTILATORsarijan setiklinovBelum ada peringkat
- Depo BangunanDokumen16 halamanDepo BangunanHanifah Ainun AryanaBelum ada peringkat
- Jaringan Telepon, Data Dan WifiDokumen2 halamanJaringan Telepon, Data Dan Wifibkd paskotBelum ada peringkat
- PermenPUPR14 2017Dokumen36 halamanPermenPUPR14 2017asyraaf al fatih arifBelum ada peringkat
- Rks Kabel DataDokumen11 halamanRks Kabel DataWahyu SeptianBelum ada peringkat
- Pencahayaan AlamiDokumen28 halamanPencahayaan AlamiArya WararuchiBelum ada peringkat
- ESKALATORDokumen10 halamanESKALATORRadit RidaBelum ada peringkat
- Proposal Modifikasi Mesin Pemotong KemplangDokumen14 halamanProposal Modifikasi Mesin Pemotong KemplangFajar HerlambangBelum ada peringkat
- Mengenal Pekerjaan MEPDokumen3 halamanMengenal Pekerjaan MEPdimasBelum ada peringkat
- Rancang Bangun Kipas AnginDokumen12 halamanRancang Bangun Kipas AnginnovrizaaaBelum ada peringkat
- GARDU T3Dokumen23 halamanGARDU T3Muhammad ArifaiBelum ada peringkat
- Koridor DenahDokumen1 halamanKoridor DenahHasto UtomoBelum ada peringkat
- RANCANG BANGUN MESIN PENETAS TELUR OTOMATIS BERBASIS MIKROKONTROLER ATMEGA8Dokumen7 halamanRANCANG BANGUN MESIN PENETAS TELUR OTOMATIS BERBASIS MIKROKONTROLER ATMEGA8junaidite13Belum ada peringkat
- Opencv Dengan Python Nor KandirDokumen34 halamanOpencv Dengan Python Nor KandirFadil RockBelum ada peringkat
- RKS MepDokumen367 halamanRKS MepDINAMIKA INOVASI TEKNOLOGIBelum ada peringkat
- Cara Menambahkan Hatch Pattern Pada AutocadDokumen2 halamanCara Menambahkan Hatch Pattern Pada AutocadImam Shodiq HaratulisanBelum ada peringkat
- Komponen Utama ACDokumen12 halamanKomponen Utama ACrusdi febriyantoBelum ada peringkat
- Lift Gedung BertingkatDokumen6 halamanLift Gedung BertingkatRoni AdiBelum ada peringkat
- Instalasi Penanggkal PetirDokumen3 halamanInstalasi Penanggkal PetirelisstmiBelum ada peringkat
- Pasar BalerongDokumen80 halamanPasar BalerongSyaifudin Ishar100% (3)
- Penyelesain Perparkiran Kota MegapolitanDokumen34 halamanPenyelesain Perparkiran Kota MegapolitanLuki LukmanBelum ada peringkat
- EskalatorDokumen10 halamanEskalatorAisyyaa OlweyysBelum ada peringkat
- PLTU SarolangunDokumen56 halamanPLTU SarolangunMu FeBelum ada peringkat
- Makalah MekatronikaDokumen10 halamanMakalah MekatronikaTaopik Al-affandyBelum ada peringkat
- Motor DCDokumen11 halamanMotor DCWildan Fadlan KhairinBelum ada peringkat
- Alat Pengaturan Kecepatan Motor DCDokumen17 halamanAlat Pengaturan Kecepatan Motor DCRishal Asri100% (1)
- 1.1. Latar BelakangDokumen65 halaman1.1. Latar BelakangArchBelum ada peringkat
- OPTIMASI MOTOR DCDokumen11 halamanOPTIMASI MOTOR DCdan alfalfaBelum ada peringkat
- Daya Tahan KardioDokumen1 halamanDaya Tahan KardioChorintanPrabeliaBelum ada peringkat
- Bab I Pendahuluan: Positioning System. Dalam Makalah Ini Kami Membahas Mengenai Apa Itu GPS Dan ApaDokumen11 halamanBab I Pendahuluan: Positioning System. Dalam Makalah Ini Kami Membahas Mengenai Apa Itu GPS Dan ApaChorintanPrabeliaBelum ada peringkat
- Perekayasaan Sistem Antena Xi-1 (A)Dokumen138 halamanPerekayasaan Sistem Antena Xi-1 (A)adiajusBelum ada peringkat
- PointerDokumen13 halamanPointerPeter SahulekaBelum ada peringkat
- ALGO-STRUKDokumen18 halamanALGO-STRUKChorintanPrabeliaBelum ada peringkat
- ANTENA PRINSIP DAN APLIKASIDokumen166 halamanANTENA PRINSIP DAN APLIKASIAchmad Bayhaki67% (3)
- 3 Impedansi AntenaDokumen36 halaman3 Impedansi AntenaAldy W GarnaBelum ada peringkat
- Linked ListDokumen21 halamanLinked ListChorintanPrabeliaBelum ada peringkat
- Tutorial AnsoftDokumen42 halamanTutorial AnsoftRbesar01100% (3)
- Perbandingan Feed Line Dan Proximity CoupledDokumen6 halamanPerbandingan Feed Line Dan Proximity CoupledChorintanPrabeliaBelum ada peringkat