Anda mungkin juga menyukai
- Algoritma Pengendali PidDokumen28 halamanAlgoritma Pengendali PidFaddliBelum ada peringkat
- Ervira MadaniDokumen17 halamanErvira MadaniAURA• G A M I N GBelum ada peringkat
- Diferensiasi NumerikDokumen12 halamanDiferensiasi NumerikAfifah Nurul MaulinaBelum ada peringkat
- BAB VIII-Sistem Kendali PIDDokumen18 halamanBAB VIII-Sistem Kendali PIDRistiani Aprilia SimanjuntakBelum ada peringkat
- M4-5 - Pernyataan KontrolDokumen19 halamanM4-5 - Pernyataan KontrolNadia AuroraBelum ada peringkat
- Analisis Heater Menggunakan Pengendali PIDDokumen12 halamanAnalisis Heater Menggunakan Pengendali PIDAulia IstiqomahBelum ada peringkat
- LN03-COMP6599-Algorithm and Programing-R0Dokumen11 halamanLN03-COMP6599-Algorithm and Programing-R0Asep Tri PriyonoBelum ada peringkat
- Modul Praktikum 9 Analisa Sistem Dan Perancangan Kendali PidDokumen9 halamanModul Praktikum 9 Analisa Sistem Dan Perancangan Kendali PidTsaniBelum ada peringkat
- Pengenalan Konsep Pemrograman1'Dokumen30 halamanPengenalan Konsep Pemrograman1'yusuf joeBelum ada peringkat
- Realisasi Kontrol PidDokumen5 halamanRealisasi Kontrol PidUriep StoeBelum ada peringkat
- Prak Robot Dan Otomasi 3 Kinematika Dan Inverse Kinematika 2 DoFDokumen6 halamanPrak Robot Dan Otomasi 3 Kinematika Dan Inverse Kinematika 2 DoFyuda wicaksonoBelum ada peringkat
- Nidia - PR - Algo - j1617 - dD15 - Pr08 Program Perkalangan (Nested Programming) For ... EndDokumen6 halamanNidia - PR - Algo - j1617 - dD15 - Pr08 Program Perkalangan (Nested Programming) For ... EndNidia Ivana SimangunsongBelum ada peringkat
- Modul 4 - Arduino Bagian 1Dokumen17 halamanModul 4 - Arduino Bagian 1Anton IoBelum ada peringkat
- Soal Uts Algoritma Pemrograman I 2010 2011Dokumen6 halamanSoal Uts Algoritma Pemrograman I 2010 2011yudha_rezpectorBelum ada peringkat
- A - Noval Favian Bima Putra - KUIS PEMROGRAMANDokumen6 halamanA - Noval Favian Bima Putra - KUIS PEMROGRAMANNoval Favian Bima PutraBelum ada peringkat
- LANGKAH Perhitungan PrometheeDokumen8 halamanLANGKAH Perhitungan PrometheeMuhardian SyahBelum ada peringkat
- p3 Pengertian Operand Dan OperatorDokumen6 halamanp3 Pengertian Operand Dan OperatorHilal AkmalBelum ada peringkat
- Dasar Pemrograman Modul 2 OperatorDokumen12 halamanDasar Pemrograman Modul 2 OperatorMabekni YuliantoBelum ada peringkat
- Laprak Alpro Week 2Dokumen14 halamanLaprak Alpro Week 2Ega Aulia PutriBelum ada peringkat
- 1 Pengenalan Bahasa Pemograman PythonDokumen27 halaman1 Pengenalan Bahasa Pemograman PythonHusnul KhotimahBelum ada peringkat
- (Tugas Kelas-08-12112021-A) 5025201247Dokumen9 halaman(Tugas Kelas-08-12112021-A) 5025201247Alexander EichmannBelum ada peringkat
- PSK Acara 1Dokumen17 halamanPSK Acara 1NatasyaBelum ada peringkat
- Modul 3Dokumen45 halamanModul 3syaifulbachri.071Belum ada peringkat
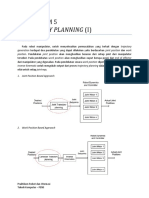
- Prak Robot Dan Otomasi 5 Trajectory Planning IDokumen8 halamanPrak Robot Dan Otomasi 5 Trajectory Planning Iyuda wicaksonoBelum ada peringkat
- Muhammad Ikhwani Arizqi Kelas 5LEDokumen17 halamanMuhammad Ikhwani Arizqi Kelas 5LEAURA• G A M I N GBelum ada peringkat
- Jobsheet 4Dokumen33 halamanJobsheet 4Muhamad Rifqi RidwansyahBelum ada peringkat
- LAPORAN PRAKTIKUM Modul 3 - Rizal - Muhammad - StrukdatDokumen10 halamanLAPORAN PRAKTIKUM Modul 3 - Rizal - Muhammad - StrukdatRizal Muhammad RifaiBelum ada peringkat
- Metnum Kel 2Dokumen16 halamanMetnum Kel 2AUDREYBelum ada peringkat
- Terbaru Fajri Sistem PengaturanDokumen94 halamanTerbaru Fajri Sistem PengaturanFajri Rahmad TrisyandiBelum ada peringkat
- Penanganan KesalahanDokumen14 halamanPenanganan KesalahanRisma WatiBelum ada peringkat
- C1C020011 - Dimas Umbara Pratama - Tugas Praktikum 2 CodingDokumen21 halamanC1C020011 - Dimas Umbara Pratama - Tugas Praktikum 2 Codingdimas umbara100% (1)
- Laporan Praktikum Pemograman C++Dokumen21 halamanLaporan Praktikum Pemograman C++dimas umbaraBelum ada peringkat
- Modul2 - Praktek - SK-1 Kelompok 3Dokumen22 halamanModul2 - Praktek - SK-1 Kelompok 3Radhes Simatupang SianturiBelum ada peringkat
- Dasar Pemrograman Modul 2 OperatorDokumen28 halamanDasar Pemrograman Modul 2 OperatorIlhamRolexRitulaBelum ada peringkat
- Sinkronisasi Dalam Sistem OperasiDokumen41 halamanSinkronisasi Dalam Sistem Operasiedi ismantoBelum ada peringkat
- Operator C++Dokumen14 halamanOperator C++RADITYA ABDILLAH PUTRABelum ada peringkat
- A 10201010 Aliet Firdaus Marsyah PDFDokumen16 halamanA 10201010 Aliet Firdaus Marsyah PDFRendy FernandaBelum ada peringkat
- TP Modul 2 Alpro - 2223Dokumen3 halamanTP Modul 2 Alpro - 2223Ruslan NawwaffBelum ada peringkat
- Template Laporan PraktikumDokumen4 halamanTemplate Laporan PraktikumsionBelum ada peringkat
- Modul 1 - Metode Komputasi 2018 - GP UPDokumen7 halamanModul 1 - Metode Komputasi 2018 - GP UPAmalia YusriyaniBelum ada peringkat
- Muhammad Ikhwani ArizqiDokumen26 halamanMuhammad Ikhwani ArizqiAURA• G A M I N GBelum ada peringkat
- Laporan Praktikum IiDokumen24 halamanLaporan Praktikum IiAlan TunamayoBelum ada peringkat
- Prak Robot Dan Otomasi 4 Kinematika Dan Inverse Kinematika 3 DoFDokumen7 halamanPrak Robot Dan Otomasi 4 Kinematika Dan Inverse Kinematika 3 DoFyuda wicaksonoBelum ada peringkat
- Laporan2 - A1G021058 - HENI TRI UTAMIDokumen14 halamanLaporan2 - A1G021058 - HENI TRI UTAMIDEVI NESTITI AnggrainiBelum ada peringkat
- Modul AlgoDokumen23 halamanModul AlgoAndika PratamaBelum ada peringkat
- Komputer vision-UAS-iip Umar Rifai-18113093Dokumen19 halamanKomputer vision-UAS-iip Umar Rifai-18113093Adhi SetyawanBelum ada peringkat
- C1.2 Pemrograman Dasar - 2013 - UtamaDokumen25 halamanC1.2 Pemrograman Dasar - 2013 - UtamaPramesthi HandaruBelum ada peringkat
- Pernyataan KontrolDokumen19 halamanPernyataan KontrolAlif FathanBelum ada peringkat
- Jobsheet 1Dokumen12 halamanJobsheet 1Toto Bachtiar PalokotoBelum ada peringkat
- 03 Pengantar AlgoritmaDokumen41 halaman03 Pengantar AlgoritmaKhori WahyudiBelum ada peringkat
- Soal Latihan PBO Kelas XIDokumen39 halamanSoal Latihan PBO Kelas XICatur HermawanBelum ada peringkat
- Materi 2 Dasar Dasar Pemrograman JAVADokumen7 halamanMateri 2 Dasar Dasar Pemrograman JAVAAhmad Badaruddin Al FarisyBelum ada peringkat
- Laporan Praktikum: Proyek Pemrograman Internet Dan E-CommerceDokumen11 halamanLaporan Praktikum: Proyek Pemrograman Internet Dan E-CommerceIntan fitri AnggrainiBelum ada peringkat
- Input Program Dinamis Dan Perintah KondisionalDokumen15 halamanInput Program Dinamis Dan Perintah KondisionalPutria KusumawantiBelum ada peringkat
- Tugas 6 Prak. Sistem Kendali (M.Seftian Agung Sadewo 061830310175 5LB)Dokumen24 halamanTugas 6 Prak. Sistem Kendali (M.Seftian Agung Sadewo 061830310175 5LB)Seftian AgungBelum ada peringkat
- 14 DimasAdiSaputra 13191015Dokumen14 halaman14 DimasAdiSaputra 13191015Dimas AdiBelum ada peringkat
- Modul 5Dokumen39 halamanModul 5jovangilbert7160Belum ada peringkat
- Epp Bahan Ajar 2 PDFDokumen18 halamanEpp Bahan Ajar 2 PDFPalupiBelum ada peringkat
- Modul Praktikum Fisika Komputasi 1.6Dokumen45 halamanModul Praktikum Fisika Komputasi 1.6bella_dsBelum ada peringkat
- GUNN DIODE (Transferred Electron Device) BAHANDokumen11 halamanGUNN DIODE (Transferred Electron Device) BAHANNounna IjahhBelum ada peringkat
- Bab III InalumDokumen19 halamanBab III InalumNounna Ijahh100% (1)
- Gunn Diode Atau Ditransfer Perangkat ElectronDokumen4 halamanGunn Diode Atau Ditransfer Perangkat ElectronNounna IjahhBelum ada peringkat
- Mengenal Fungsi AVR Pada Generator AC 3 PhaseDokumen6 halamanMengenal Fungsi AVR Pada Generator AC 3 PhaseNounna IjahhBelum ada peringkat
- Bab IV InalumDokumen58 halamanBab IV InalumNounna IjahhBelum ada peringkat
- Bab I InalumDokumen8 halamanBab I InalumNounna IjahhBelum ada peringkat
- Bab II InalumDokumen29 halamanBab II InalumNounna IjahhBelum ada peringkat
- Sistem AkuisisiDokumen4 halamanSistem AkuisisiNounna IjahhBelum ada peringkat
- Bab V InalumDokumen40 halamanBab V InalumNounna IjahhBelum ada peringkat
- Percobaan No 1 Electrical DriverDokumen6 halamanPercobaan No 1 Electrical DriverNounna IjahhBelum ada peringkat
- Makalah Sensor & TranducerDokumen28 halamanMakalah Sensor & TranducerNounna IjahhBelum ada peringkat
- Standar Operasional ProsedurDokumen17 halamanStandar Operasional ProsedurNounna IjahhBelum ada peringkat