Anda mungkin juga menyukai
- Mari Belajar Pemrograman Berorientasi Objek menggunakan Visual C# 6.0Dari EverandMari Belajar Pemrograman Berorientasi Objek menggunakan Visual C# 6.0Penilaian: 4 dari 5 bintang4/5 (16)
- Pemrograman Berorientasi Objek dengan Visual C#Dari EverandPemrograman Berorientasi Objek dengan Visual C#Penilaian: 3.5 dari 5 bintang3.5/5 (6)
- Service TelevisiDokumen30 halamanService TelevisiHeru PamungkasBelum ada peringkat
- OPTIMALKANSOALPRAKTEKAUDIOVIDEODokumen9 halamanOPTIMALKANSOALPRAKTEKAUDIOVIDEOsigit tri33% (3)
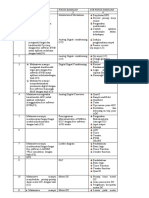
- ELEKTRONIKA DIGITALDokumen11 halamanELEKTRONIKA DIGITALSyiamatul ElifBelum ada peringkat
- Asipa Herwin Kisi Dan Soal Siskom Kls XDokumen6 halamanAsipa Herwin Kisi Dan Soal Siskom Kls XhasmaBelum ada peringkat
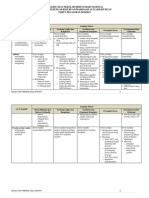
- III. TEMPLATE BARU-RPS Elektronika DigitalDokumen11 halamanIII. TEMPLATE BARU-RPS Elektronika Digitalelif maghfirohBelum ada peringkat
- Pertemuan 1Dokumen89 halamanPertemuan 1Taufik AkbarBelum ada peringkat
- RPT Ask Tingkatan 2 2021Dokumen9 halamanRPT Ask Tingkatan 2 2021Alyaa Kamil0% (2)
- KISI-KISI USBN Dasar Dasar Teknik Komputer Dan InformatikaDokumen19 halamanKISI-KISI USBN Dasar Dasar Teknik Komputer Dan InformatikaAnonymous Qx7CXX1100% (1)
- Jadwal Kuliah Tiap MingguDokumen2 halamanJadwal Kuliah Tiap Mingguazhar saddiqBelum ada peringkat
- Kisi Kisi Ujian Sekolah Teori TKJDokumen4 halamanKisi Kisi Ujian Sekolah Teori TKJKikin NugrahaBelum ada peringkat
- Kartu Soal Teori TM SMT Genap 2023Dokumen19 halamanKartu Soal Teori TM SMT Genap 2023Andi Muhammad DzulfikarBelum ada peringkat
- RPS DEKA536009 Sistem MikrokontrolerDokumen16 halamanRPS DEKA536009 Sistem Mikrokontrolerbagasdava90Belum ada peringkat
- Bab I PendahuluanDokumen9 halamanBab I PendahuluanMuhammad AldiBelum ada peringkat
- Kisi-Kisi Soal Uts Produktif Xii TKJDokumen2 halamanKisi-Kisi Soal Uts Produktif Xii TKJDOKUMEN SMK AL MUJAHIDBelum ada peringkat
- RPS Pengolahan Sinyal DigitalDokumen11 halamanRPS Pengolahan Sinyal DigitalZaenudinBelum ada peringkat
- Sar Adc ImbaDokumen27 halamanSar Adc ImbaChairil AnwarBelum ada peringkat
- Rangkaian DigitalDokumen11 halamanRangkaian DigitalagusBelum ada peringkat
- 2.5.3 - CP Konsentrasi Teknik Elektronika Industri - 160422Dokumen5 halaman2.5.3 - CP Konsentrasi Teknik Elektronika Industri - 160422anon_84228156Belum ada peringkat
- Kisi-Kisi SiskomDokumen2 halamanKisi-Kisi SiskomPAS 2020Belum ada peringkat
- Bab 1 PendahuluanDokumen64 halamanBab 1 PendahuluanRendy Christian SiahaanBelum ada peringkat
- RPS Elektronika Digital S. Tr. RTI ITSDokumen3 halamanRPS Elektronika Digital S. Tr. RTI ITSHermanBelum ada peringkat
- VHDLDokumen22 halamanVHDLNaufal SkaBelum ada peringkat
- Laporan DanisDokumen17 halamanLaporan DanissetiajirzkBelum ada peringkat
- ATP 2023 - Konsentrasi KeahlianDokumen8 halamanATP 2023 - Konsentrasi KeahlianDwi RiyadiBelum ada peringkat
- Perancangan Komponen TerprogramDokumen59 halamanPerancangan Komponen TerprogramMuhammad Jody Ichwanul AzizBelum ada peringkat
- SAR ADC PENJELASANDokumen27 halamanSAR ADC PENJELASANDewi Nurazizah Sya'adatuddaroen100% (1)
- El2102 03 13216102Dokumen4 halamanEl2102 03 13216102amin rizzaBelum ada peringkat
- RPS Rangkaian DigitalDokumen8 halamanRPS Rangkaian DigitalNoviardi Awiskarni0% (1)
- RPS-EE3601-19 - Telekomunikasi Lanjut-Genap 2019Dokumen3 halamanRPS-EE3601-19 - Telekomunikasi Lanjut-Genap 2019River hutabaratBelum ada peringkat
- TUGAS EVALUASI PEMBELAJARAN RivaldiDokumen39 halamanTUGAS EVALUASI PEMBELAJARAN RivaldiRifqi FathurrohmanBelum ada peringkat
- Jaringan KomputerDokumen7 halamanJaringan KomputerAnonymous dIOZhDUqSiBelum ada peringkat
- TKJ SMK Kisi Kisi 2019Dokumen3 halamanTKJ SMK Kisi Kisi 2019EricxStraightxAlexandriaBelum ada peringkat
- Analisis Prota Dan Promes Dadang 2017 2018Dokumen19 halamanAnalisis Prota Dan Promes Dadang 2017 2018Dadang SuhadaBelum ada peringkat
- CP Dan ATP Teknik Elektronika IndustriDokumen35 halamanCP Dan ATP Teknik Elektronika IndustriEgieBelum ada peringkat
- LAPRAK (9) - C1 - 064 - Rehan Pinanda PrasetiaDokumen8 halamanLAPRAK (9) - C1 - 064 - Rehan Pinanda PrasetiaRehan PinandaBelum ada peringkat
- Analisis Prota Dan Promes Dadang 2017 2018Dokumen16 halamanAnalisis Prota Dan Promes Dadang 2017 2018Dadang SuhadaBelum ada peringkat
- 1.silabus KD 3.3 & 3.4Dokumen4 halaman1.silabus KD 3.3 & 3.4Zainul FananiBelum ada peringkat
- LAPORAN AliffvDokumen16 halamanLAPORAN AliffvsetiajirzkBelum ada peringkat
- Pengujian Konversi Sinyal Akselerasi, Kecepatan Dan Posisi Menggunakan Data Definitif (Pendahuluan: Sinyal Dasar)Dokumen15 halamanPengujian Konversi Sinyal Akselerasi, Kecepatan Dan Posisi Menggunakan Data Definitif (Pendahuluan: Sinyal Dasar)farisBelum ada peringkat
- Kisi-Kisi Soal Ski Kelas Xi - Pas Semester 2Dokumen1 halamanKisi-Kisi Soal Ski Kelas Xi - Pas Semester 2Wibowo Joko NuryantoBelum ada peringkat
- SistemKomputerUSBN2018Dokumen2 halamanSistemKomputerUSBN2018M. Awaludin S. KomBelum ada peringkat
- KISI KISI Sistem KomputerDokumen2 halamanKISI KISI Sistem KomputerArisTriIIBelum ada peringkat
- Kisi Kisi UNBK TKJ Kurikulum 2013 RevisiDokumen3 halamanKisi Kisi UNBK TKJ Kurikulum 2013 RevisimulyajiBelum ada peringkat
- Kisi-Kisi c2 2021Dokumen5 halamanKisi-Kisi c2 2021mbahkung_arifBelum ada peringkat
- 5 - Penilaian Bagus DwiartoDokumen12 halaman5 - Penilaian Bagus DwiartoSMKN 1 WANAYASABelum ada peringkat
- Kisi Kisi KJDDokumen3 halamanKisi Kisi KJDAhmad AsrofiBelum ada peringkat
- RPS Embedded SystemDokumen5 halamanRPS Embedded SystemKhusnul HidayatBelum ada peringkat
- Rencana Pelaksanaan Pembelajaran I. IdentitasDokumen12 halamanRencana Pelaksanaan Pembelajaran I. IdentitasDonal IndraBelum ada peringkat
- KISI-KISI SOAL PAS SEMESTER GENAP TAHUN 2021/2022Dokumen4 halamanKISI-KISI SOAL PAS SEMESTER GENAP TAHUN 2021/2022lasumpu pustapaBelum ada peringkat
- Filter dan Pengatur NadaDokumen4 halamanFilter dan Pengatur NadaNurdin Arief100% (1)
- C3 Sistem Kontrol Terprogram Revisi-1Dokumen17 halamanC3 Sistem Kontrol Terprogram Revisi-1Alfi BachtiarBelum ada peringkat
- Ksii Kisi Soale KJD Achmad KhoironDokumen5 halamanKsii Kisi Soale KJD Achmad KhoironYanuar Richo HardiantoBelum ada peringkat
- Praktikum Komunikasi Data - M Sirajuddin - Semester 4Dokumen5 halamanPraktikum Komunikasi Data - M Sirajuddin - Semester 4rifkysfBelum ada peringkat
- Y13 03 M Dimas Firmansyah 118130059 EL2104 OktaPriyani PDFDokumen9 halamanY13 03 M Dimas Firmansyah 118130059 EL2104 OktaPriyani PDFMuammar Dimaz FirmansyahBelum ada peringkat
- RPS Praktikum Komputer IIDokumen16 halamanRPS Praktikum Komputer IIharismulyadiumpBelum ada peringkat
- RPS - Pengantar Trasnformasi DigitalDokumen11 halamanRPS - Pengantar Trasnformasi DigitalRendi SaputraBelum ada peringkat
- Prak Sisdig Modul 03Dokumen15 halamanPrak Sisdig Modul 03Sella SimangunsongBelum ada peringkat
- MP Desain GrafisDokumen6 halamanMP Desain GrafisTanwir IrulBelum ada peringkat
- RANGKAIANDokumen5 halamanRANGKAIANdini nfpBelum ada peringkat
- Analisis KI-KDDokumen4 halamanAnalisis KI-KDrani viaBelum ada peringkat
- Bahan UK KGDokumen16 halamanBahan UK KGsuryo sistantoBelum ada peringkat
- Soal PD OnlineDokumen9 halamanSoal PD Onlinesuryo sistantoBelum ada peringkat
- Soal Resistor 1Dokumen4 halamanSoal Resistor 1suryo sistanto0% (1)
- Form Import Soal Pilihan Ganda RadioDokumen7 halamanForm Import Soal Pilihan Ganda Radiosuryo sistantoBelum ada peringkat
- Soal DLE OnlineDokumen6 halamanSoal DLE Onlinesuryo sistantoBelum ada peringkat
- Servis Dan Cara Bongkar Setrika - HTML PDFDokumen8 halamanServis Dan Cara Bongkar Setrika - HTML PDFsuryo sistantoBelum ada peringkat
- Bahan UK KGDokumen16 halamanBahan UK KGsuryo sistantoBelum ada peringkat
- Refleksi Modul On-2 KK JDokumen4 halamanRefleksi Modul On-2 KK Jsuryo sistantoBelum ada peringkat
- Refleksi Modul On-2 KK JDokumen4 halamanRefleksi Modul On-2 KK Jsuryo sistantoBelum ada peringkat
- CCTV_INSTALLDokumen6 halamanCCTV_INSTALLsuryo sistantoBelum ada peringkat
- Transistor Sebagai Saklar PDFDokumen7 halamanTransistor Sebagai Saklar PDFsuryo sistantoBelum ada peringkat
- PetunjukDokumen5 halamanPetunjuksuryo sistantoBelum ada peringkat
- 11 Kkpi GenapDokumen5 halaman11 Kkpi Genapsuryo sistantoBelum ada peringkat
- Soal X Kkpi HTMLDokumen12 halamanSoal X Kkpi HTMLsuryo sistantoBelum ada peringkat
- PetunjukDokumen5 halamanPetunjuksuryo sistantoBelum ada peringkat
- TTTTTTTTTTTTTTTTTTTTTTTDokumen4 halamanTTTTTTTTTTTTTTTTTTTTTTTsuryo sistantoBelum ada peringkat
- PetunjukDokumen5 halamanPetunjuksuryo sistantoBelum ada peringkat
- LKPD PsikomotorikDokumen6 halamanLKPD Psikomotoriksuryo sistantoBelum ada peringkat
- PetunjukDokumen5 halamanPetunjuksuryo sistantoBelum ada peringkat
- 11 Kkpi GenapDokumen5 halaman11 Kkpi Genapsuryo sistantoBelum ada peringkat
- 11 Kkpi GenapDokumen5 halaman11 Kkpi Genapsuryo sistantoBelum ada peringkat
- UuuuuuuuuuuuuDokumen4 halamanUuuuuuuuuuuuusuryo sistantoBelum ada peringkat
- Tugas M5 KB 1Dokumen11 halamanTugas M5 KB 1suryo sistantoBelum ada peringkat
- Kisi-Kisi Soal - Tes - Akhir - TM - Perekayasaan Radio Dan TV - AvDokumen19 halamanKisi-Kisi Soal - Tes - Akhir - TM - Perekayasaan Radio Dan TV - Avsuryo sistantoBelum ada peringkat
- KKM Dle 2018Dokumen87 halamanKKM Dle 2018suryo sistantoBelum ada peringkat
- Perangkat Pembelajaran K2013 Revisi RadioDokumen29 halamanPerangkat Pembelajaran K2013 Revisi Radiosuryo sistantoBelum ada peringkat
- LKPD KognitifDokumen3 halamanLKPD Kognitifsuryo sistantoBelum ada peringkat
- YYYYYYYYYYYYDokumen15 halamanYYYYYYYYYYYYsuryo sistantoBelum ada peringkat