0% menganggap dokumen ini bermanfaat (0 suara)
211 tayangan12 halamanKontrol Tampilan 7-Segment MCS-51
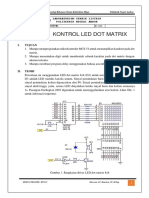
Dokumen tersebut berisi penjelasan tentang percobaan menggunakan mikrokontroler MCS-51 untuk mengontrol tampilan 7-segmen dua digit. Program mikrokontroler akan menampilkan angka desimal dari 00 hingga 99 secara berurutan pada tampilan 7-segmen sambil memperkenalkan penundaan 0,5 detik antar perubahan angka. Kode program ditulis dalam bahasa assembly MCS-51 dan dihubungkan ke perangkat keras tampilan
Diunggah oleh
1 BRONAL SIREGARHak Cipta
© © All Rights Reserved
Kami menangani hak cipta konten dengan serius. Jika Anda merasa konten ini milik Anda, ajukan klaim di sini.
Format Tersedia
Unduh sebagai PDF, TXT atau baca online di Scribd
0% menganggap dokumen ini bermanfaat (0 suara)
211 tayangan12 halamanKontrol Tampilan 7-Segment MCS-51
Dokumen tersebut berisi penjelasan tentang percobaan menggunakan mikrokontroler MCS-51 untuk mengontrol tampilan 7-segmen dua digit. Program mikrokontroler akan menampilkan angka desimal dari 00 hingga 99 secara berurutan pada tampilan 7-segmen sambil memperkenalkan penundaan 0,5 detik antar perubahan angka. Kode program ditulis dalam bahasa assembly MCS-51 dan dihubungkan ke perangkat keras tampilan
Diunggah oleh
1 BRONAL SIREGARHak Cipta
© © All Rights Reserved
Kami menangani hak cipta konten dengan serius. Jika Anda merasa konten ini milik Anda, ajukan klaim di sini.
Format Tersedia
Unduh sebagai PDF, TXT atau baca online di Scribd