Anda mungkin juga menyukai
- Kuliah Arw FSTDokumen31 halamanKuliah Arw FSTRandhani AgusBelum ada peringkat
- Autokorelasi Dan Autokorelasi ParsialDokumen7 halamanAutokorelasi Dan Autokorelasi ParsialKezia OliviaBelum ada peringkat
- 2021B-Modul ARMA Dan ARIMA-PurwantoDokumen54 halaman2021B-Modul ARMA Dan ARIMA-Purwantopurwantowidodo3884Belum ada peringkat
- Analisis Time Series Terhadap Saham Bank BNI (Ok)Dokumen22 halamanAnalisis Time Series Terhadap Saham Bank BNI (Ok)icha_ismailBelum ada peringkat
- Makalah Analisis Time SeriesDokumen8 halamanMakalah Analisis Time SeriesAndi Nur Arifiah RahmanBelum ada peringkat
- Pertemuan 3 (PPProduksi) - Peramalan (Forecasting)Dokumen43 halamanPertemuan 3 (PPProduksi) - Peramalan (Forecasting)Sherly RahmaBelum ada peringkat
- Annas Nandhia Rakhman - 175090507111036Dokumen16 halamanAnnas Nandhia Rakhman - 175090507111036Zidane AriyandyBelum ada peringkat
- Bab 2 PDFDokumen41 halamanBab 2 PDFdaniBelum ada peringkat
- Model Autoregressive Integrated Moving AverageDokumen41 halamanModel Autoregressive Integrated Moving AverageAghnia Fauziah SaharBelum ada peringkat
- Analisa Kestabilan Dengan Metode NyquistDokumen9 halamanAnalisa Kestabilan Dengan Metode NyquistjayaBelum ada peringkat
- Pertemuan - 15 Regresi Linier Sederhana PDFDokumen11 halamanPertemuan - 15 Regresi Linier Sederhana PDFImam GunawanBelum ada peringkat
- Prob 8 Dan Prob 9Dokumen9 halamanProb 8 Dan Prob 9Daning Kinanti SutamaBelum ada peringkat
- Nurazizah MahdinDokumen5 halamanNurazizah Mahdincici safitriBelum ada peringkat
- Kelompok 10 - Makalah Regresi Dan KorelasiDokumen14 halamanKelompok 10 - Makalah Regresi Dan KorelasiSitiJenab UlapiahBelum ada peringkat
- Bab2-06305149010 (1) SDokumen20 halamanBab2-06305149010 (1) Sditha'08Belum ada peringkat
- Revisi Tugas Topik IV Rahma, Suci, RezkyDokumen35 halamanRevisi Tugas Topik IV Rahma, Suci, Rezkyikhlas_235656Belum ada peringkat
- Metode Box - JenkinsDokumen31 halamanMetode Box - JenkinsMonica ShintaBelum ada peringkat
- R1D115160Dokumen18 halamanR1D115160Anho NtaraweBelum ada peringkat
- ID Penentuan Kestabilan Sistem Kontrol LupDokumen11 halamanID Penentuan Kestabilan Sistem Kontrol LupAan Eko SetiawanBelum ada peringkat
- Graf Kincir Angin Berarah Alda Maulida NatsirDokumen8 halamanGraf Kincir Angin Berarah Alda Maulida NatsirAlda Maulida NatsirBelum ada peringkat
- ARW PertamaDokumen16 halamanARW PertamaYUYUNBelum ada peringkat
- Fungsi AlihDokumen9 halamanFungsi AlihBerty Ismaining TyasBelum ada peringkat
- Kumpulan Rumus Fisika SmaDokumen82 halamanKumpulan Rumus Fisika SmaNoctiz StriFeBelum ada peringkat
- 01 Konsep Dasar Time SeriesDokumen16 halaman01 Konsep Dasar Time SeriesDwinasanti NurBelum ada peringkat
- Linear Quadratic Regulator PDFDokumen30 halamanLinear Quadratic Regulator PDFReyhan RBelum ada peringkat
- Faktorisasi Lenstra Kurva EliptikDokumen3 halamanFaktorisasi Lenstra Kurva EliptikAchmad ismailBelum ada peringkat
- Rangkuman 2-3Dokumen6 halamanRangkuman 2-3Muhammad SyafrizalBelum ada peringkat
- Proses Stokastik Dan ACF Distance ClusterDokumen4 halamanProses Stokastik Dan ACF Distance ClusterFaidatul InayahBelum ada peringkat
- Hitung Perataan Terapan Minggu 8: Dr. Ir. Dwi Lestari, S.T, M.E, IPMDokumen26 halamanHitung Perataan Terapan Minggu 8: Dr. Ir. Dwi Lestari, S.T, M.E, IPMTeguh Arya WibawaBelum ada peringkat
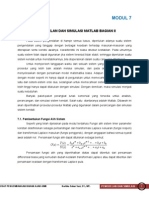
- Pemodelan Dan Simulasi Matlab 2Dokumen11 halamanPemodelan Dan Simulasi Matlab 2luckyss9950% (2)
- Kestabilan NyquistDokumen13 halamanKestabilan NyquistMuhamad MuharomiBelum ada peringkat
- 6e - Desain Kontroler PIDDokumen5 halaman6e - Desain Kontroler PID502.134 Anamta Arrum Sulistyo AjiBelum ada peringkat
- Kelompok 7 PIS - ACF Dan CCFDokumen4 halamanKelompok 7 PIS - ACF Dan CCFIntania Putri ZahraBelum ada peringkat
- Pendahuluan DynamicDokumen21 halamanPendahuluan Dynamicfaat dhikaBelum ada peringkat
- Model Marginal Logistik Biner Untuk Data LongitudinalDokumen11 halamanModel Marginal Logistik Biner Untuk Data LongitudinalIsmiBelum ada peringkat
- Kumpulan Rumus FisikaDokumen83 halamanKumpulan Rumus FisikaAulia Nur IhsaniBelum ada peringkat
- UAS FI2102 Mekanika - 2018Dokumen14 halamanUAS FI2102 Mekanika - 2018Adam CrystalpasBelum ada peringkat
- Model Matematis 1Dokumen30 halamanModel Matematis 1ivan rizaldyBelum ada peringkat
- Laporan PSD 2 Pelsi Ockta Fani 2311079025Dokumen21 halamanLaporan PSD 2 Pelsi Ockta Fani 2311079025rgywhk45rtBelum ada peringkat
- Modul Komputasi Statistik Dengan R SoftwareDokumen34 halamanModul Komputasi Statistik Dengan R SoftwareMuhammad LuqmanBelum ada peringkat
- Minggu 6 Peramalan Time Series Metode ARIMADokumen25 halamanMinggu 6 Peramalan Time Series Metode ARIMAIsya NafiaBelum ada peringkat
- Materi 1Dokumen78 halamanMateri 1Kevin SBelum ada peringkat
- 2. NOMOR 15 KEAKTIFAN SISWA DALAM PBM 2022-2023Dokumen12 halaman2. NOMOR 15 KEAKTIFAN SISWA DALAM PBM 2022-2023faradiba bellaBelum ada peringkat
- Surat Lamaran Admin Finance AADKDokumen1 halamanSurat Lamaran Admin Finance AADKfaradiba bellaBelum ada peringkat
- Template AlgebraDokumen5 halamanTemplate Algebrafaradiba bellaBelum ada peringkat
- Surat Lamaran Admin Mainan AnakDokumen1 halamanSurat Lamaran Admin Mainan Anakfaradiba bellaBelum ada peringkat
- Surat Keterangan Kerja FaradibaDokumen1 halamanSurat Keterangan Kerja Faradibafaradiba bellaBelum ada peringkat
- Surat Lamaran Administrasi MarketingDokumen1 halamanSurat Lamaran Administrasi Marketingfaradiba bellaBelum ada peringkat
- KD Kelas 6Dokumen3 halamanKD Kelas 6faradiba bellaBelum ada peringkat
- Surat Lamaran EmasDokumen1 halamanSurat Lamaran Emasfaradiba bellaBelum ada peringkat
- Sampul Dalam Dan Lembar PengesahanDokumen11 halamanSampul Dalam Dan Lembar Pengesahanfaradiba bellaBelum ada peringkat