0% menganggap dokumen ini bermanfaat (0 suara)
30 tayangan15 halamanKontrol Ketinggian Air Pintu Bendung
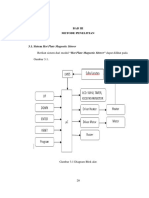
Skripsi ini membahas pengontrolan ketinggian level air pada miniatur pintu bendung berbasis mikrokontroler. Sistem terdiri dari plant miniatur pintu bendung, sensor jarak ultrasonik, driver motor DC, motor DC, dan mikrokontroler Arduino yang mengimplementasikan algoritma kontrol PID. Tujuan penelitian ini adalah merancang sistem kontrol level air pada miniatur pintu bendung dengan respon yang stabil menggunakan kontroler PID.
Diunggah oleh
Vinsensius FeriHak Cipta
© © All Rights Reserved
Kami menangani hak cipta konten dengan serius. Jika Anda merasa konten ini milik Anda, ajukan klaim di sini.
Format Tersedia
Unduh sebagai PDF, TXT atau baca online di Scribd
0% menganggap dokumen ini bermanfaat (0 suara)
30 tayangan15 halamanKontrol Ketinggian Air Pintu Bendung
Skripsi ini membahas pengontrolan ketinggian level air pada miniatur pintu bendung berbasis mikrokontroler. Sistem terdiri dari plant miniatur pintu bendung, sensor jarak ultrasonik, driver motor DC, motor DC, dan mikrokontroler Arduino yang mengimplementasikan algoritma kontrol PID. Tujuan penelitian ini adalah merancang sistem kontrol level air pada miniatur pintu bendung dengan respon yang stabil menggunakan kontroler PID.
Diunggah oleh
Vinsensius FeriHak Cipta
© © All Rights Reserved
Kami menangani hak cipta konten dengan serius. Jika Anda merasa konten ini milik Anda, ajukan klaim di sini.
Format Tersedia
Unduh sebagai PDF, TXT atau baca online di Scribd