Anda mungkin juga menyukai
- Ujian Sem Genap 2122Dokumen12 halamanUjian Sem Genap 2122Ni Njoman Manik SusantiniBelum ada peringkat
- Statistika Mancova Satu KovariatDokumen5 halamanStatistika Mancova Satu KovariatAde Wulan Ramadhani100% (1)
- Statistika Mancova Satu KovariatDokumen5 halamanStatistika Mancova Satu KovariatAde Wulan RamadhaniBelum ada peringkat
- 5570 Lap. Pengpros (DT) Opi-NovryDokumen14 halaman5570 Lap. Pengpros (DT) Opi-NovryNovry MahdevikaBelum ada peringkat
- Tugas AkhirDokumen17 halamanTugas AkhirFiex DewantoBelum ada peringkat
- Hamda Aidil - Pengolahan Data Menggunakan SpssDokumen14 halamanHamda Aidil - Pengolahan Data Menggunakan SpssHamda AidilBelum ada peringkat
- 6 Tugas 4 - MetNum 100423Dokumen2 halaman6 Tugas 4 - MetNum 100423Diki MartanaBelum ada peringkat
- Pegangan Modul 2Dokumen11 halamanPegangan Modul 2ahulBelum ada peringkat
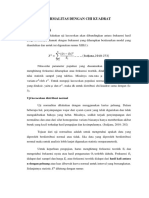
- Uji Normalitas Dengan Chi Kuadrat Kelas EksperimenDokumen7 halamanUji Normalitas Dengan Chi Kuadrat Kelas EksperimenYusuf AdhityaBelum ada peringkat
- Perbaikan Tugas Statistik (Quiz) Semester II M. FadliDokumen5 halamanPerbaikan Tugas Statistik (Quiz) Semester II M. Fadlialdy1989Belum ada peringkat
- Lap Covid Hari Ke 577Dokumen19 halamanLap Covid Hari Ke 577risang akrima fikriBelum ada peringkat
- Pertemuan 6 Responsi ADK (MODEL LOGISTIK)Dokumen12 halamanPertemuan 6 Responsi ADK (MODEL LOGISTIK)Ajeng FirdausyBelum ada peringkat
- PUTRIAUGUSTHIADokumen5 halamanPUTRIAUGUSTHIAPutri AugusthiaBelum ada peringkat
- StatistikDokumen19 halamanStatistikiswanBelum ada peringkat
- Tugas Ke 1 Statistika Ekonomi Revisi PDFDokumen8 halamanTugas Ke 1 Statistika Ekonomi Revisi PDFpnm mekaar bukit intanBelum ada peringkat
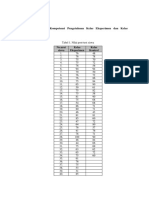
- Data Nilai Kompetensi Pengetahuan Kelas Eksperimen Dan Kelas KontrolDokumen5 halamanData Nilai Kompetensi Pengetahuan Kelas Eksperimen Dan Kelas KontrolEviana ImaniartiBelum ada peringkat
- Tugas Analisis Survival: Application of Stratified Cox Model To Remission Survival Data (R Software)Dokumen13 halamanTugas Analisis Survival: Application of Stratified Cox Model To Remission Survival Data (R Software)milasari18Belum ada peringkat
- Pertemuan 19 Analisis Regresi Dengan Variabel ModeratingDokumen9 halamanPertemuan 19 Analisis Regresi Dengan Variabel Moderatingjulia shfrBelum ada peringkat
- Laporan Autorefractometer AlidDokumen12 halamanLaporan Autorefractometer Alidalidzar ghifariBelum ada peringkat
- Makalah MC NemarDokumen9 halamanMakalah MC NemarrayaBelum ada peringkat
- Karakteristik Dinamik Pengendalian ProsesDokumen8 halamanKarakteristik Dinamik Pengendalian ProsesRaden Ahmad FadhilahBelum ada peringkat
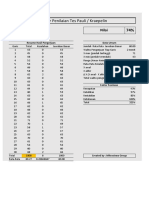
- Lembar Penilaian Tes Pauli / Kraepelin: NilaiDokumen5 halamanLembar Penilaian Tes Pauli / Kraepelin: NilaiMuhammad Herling100% (1)
- Syafiq Akhdanil A - Tugas Distribusi Frekuensi StatistikaDokumen4 halamanSyafiq Akhdanil A - Tugas Distribusi Frekuensi StatistikaSyafiq akhdanilBelum ada peringkat
- Laporan Percobaan 1 Praktek Sistem Kendali LanjutDokumen8 halamanLaporan Percobaan 1 Praktek Sistem Kendali Lanjutdwi safitriBelum ada peringkat
- Laporan Hasil Modul VDokumen15 halamanLaporan Hasil Modul VVAN EGA IVANNOYA 22 84Belum ada peringkat
- Soal 2 - Uji StasionerDokumen7 halamanSoal 2 - Uji StasionerLucky AgungrafiiBelum ada peringkat
- MuhammadFadillahHarahap Laporan08GEMDokumen7 halamanMuhammadFadillahHarahap Laporan08GEMFadillah HarahapBelum ada peringkat
- NurwanPutraMulya PPTSemhasDokumen47 halamanNurwanPutraMulya PPTSemhasRamliBelum ada peringkat
- Tugas 3 Dwi Priyo Utomo SantosoDokumen12 halamanTugas 3 Dwi Priyo Utomo SantosoDwi Priyo UtomoBelum ada peringkat
- kONTROL CHART DAN EVALUASIDokumen56 halamankONTROL CHART DAN EVALUASIGilang Najahi Billah100% (1)
- Survival Pratikum 7Dokumen3 halamanSurvival Pratikum 7farahBelum ada peringkat
- Ahmad Ridho Gifari - 213020503063Dokumen16 halamanAhmad Ridho Gifari - 213020503063Ridho GifariBelum ada peringkat
- Analisis Regresi Linear SederhanaDokumen8 halamanAnalisis Regresi Linear SederhanaBayuBelum ada peringkat
- Bab 111Dokumen11 halamanBab 111bintangss350zBelum ada peringkat
- Mas LaporanDokumen11 halamanMas Laporanmelati daraBelum ada peringkat
- Statistik Annisa Khairina 3221144Dokumen6 halamanStatistik Annisa Khairina 3221144Fatimah AzzahraBelum ada peringkat
- Pertemuan12 - T TestDokumen29 halamanPertemuan12 - T Test30 M Wildan MiftahurrahmanBelum ada peringkat
- Laporan Percobaan 4 Praktek Sistem Kendali LanjutDokumen8 halamanLaporan Percobaan 4 Praktek Sistem Kendali LanjutBertusBelum ada peringkat
- Control ChartDokumen17 halamanControl ChartAndreBelum ada peringkat
- Verifikasi Metode 2021Dokumen34 halamanVerifikasi Metode 2021ovieBelum ada peringkat
- Laporan - Kelompok 16 - Praktikum03Dokumen17 halamanLaporan - Kelompok 16 - Praktikum03Alfin AlamsyahBelum ada peringkat
- Modul 5 F DikonversiDokumen33 halamanModul 5 F DikonversiKaneky GhoulBelum ada peringkat
- LAPORAN SATUAN OPERASI-dikonversiDokumen9 halamanLAPORAN SATUAN OPERASI-dikonversiAwaw DinaBelum ada peringkat
- Perancangan Pengendali Konvensional - PidDokumen112 halamanPerancangan Pengendali Konvensional - Pidcry me a riverBelum ada peringkat
- POLTEKKESSBY Studi 2524 0.draftseminarDokumen7 halamanPOLTEKKESSBY Studi 2524 0.draftseminarNikmah HidayatiBelum ada peringkat
- Dummy VariabelDokumen8 halamanDummy VariabelIshtaraBelum ada peringkat
- Makalah Probabilitas Dan StatistikaDokumen14 halamanMakalah Probabilitas Dan StatistikaRian RianBelum ada peringkat
- BAB 4 DrainaseeDokumen50 halamanBAB 4 DrainaseeAnggi PutriBelum ada peringkat
- PS6 ADL 01 PrabaFitra 25316022Dokumen12 halamanPS6 ADL 01 PrabaFitra 25316022prabaBelum ada peringkat
- Regresi Linier Sederhana Dan BergandaDokumen27 halamanRegresi Linier Sederhana Dan BergandaMirsya RosidaBelum ada peringkat
- Uji Q CochranDokumen7 halamanUji Q CochranFarihah AnnisaBelum ada peringkat
- Teori MathlabbbbDokumen175 halamanTeori MathlabbbbSyafa NauraBelum ada peringkat
- PNG 2 PDFDokumen8 halamanPNG 2 PDFAdwinarBelum ada peringkat
- 2020 UTS Komputer Dan SpasialDokumen4 halaman2020 UTS Komputer Dan SpasialLu'luil Ma'rifatiBelum ada peringkat
- Laporan Praktikum Analisis Regresi Lanjutan 1Dokumen29 halamanLaporan Praktikum Analisis Regresi Lanjutan 1niaBelum ada peringkat
- Uas Farmakokinetika 2021Dokumen1 halamanUas Farmakokinetika 2021Aliah FadhillahBelum ada peringkat
- Contoh Soal Ancova - StatistikaDokumen2 halamanContoh Soal Ancova - StatistikaARDIYANTI ARDIYANTIBelum ada peringkat
- Contoh Uji NormalitasDokumen10 halamanContoh Uji Normalitasanisa nurfitrianiBelum ada peringkat
- Variabel MediasiDokumen3 halamanVariabel MediasiLukas PrawiraBelum ada peringkat
- Data Bab 5Dokumen2 halamanData Bab 5Rizky AdityaBelum ada peringkat
- LKM4 SkoDokumen4 halamanLKM4 SkoRizky AdityaBelum ada peringkat
- Teknologi - Pakan ISIANDokumen11 halamanTeknologi - Pakan ISIANRizky AdityaBelum ada peringkat
- Faron Ramadhan - Booklet Calon Ketua Himpunan 2023Dokumen6 halamanFaron Ramadhan - Booklet Calon Ketua Himpunan 2023Rizky AdityaBelum ada peringkat
- Bab 1,2,3-1Dokumen21 halamanBab 1,2,3-1Rizky AdityaBelum ada peringkat
- Teknik InstrumentasiDokumen15 halamanTeknik InstrumentasiRizky AdityaBelum ada peringkat
- Format Penulisan JAEI Terbaru-1Dokumen5 halamanFormat Penulisan JAEI Terbaru-1Rizky AdityaBelum ada peringkat
- COVERDokumen15 halamanCOVERRizky AdityaBelum ada peringkat
- BPP Bab 1Dokumen10 halamanBPP Bab 1Rizky AdityaBelum ada peringkat
- DafpusDokumen1 halamanDafpusRizky AdityaBelum ada peringkat
- Mikro 14Dokumen2 halamanMikro 14Rizky AdityaBelum ada peringkat
- Pre Test Percobaan 2Dokumen1 halamanPre Test Percobaan 2Rizky AdityaBelum ada peringkat
- Laporan Fisika Bab 3 Viskositas Zat CairDokumen27 halamanLaporan Fisika Bab 3 Viskositas Zat CairRizky AdityaBelum ada peringkat
- Viskositas Zat CairDokumen26 halamanViskositas Zat CairRizky AdityaBelum ada peringkat
- Data Modul 4Dokumen3 halamanData Modul 4Rizky AdityaBelum ada peringkat
- SKC - Kelompok 3Dokumen19 halamanSKC - Kelompok 3Rizky AdityaBelum ada peringkat
- Rizky Aditya Nugraha - 201910201084 - Laporan Fisika Pengukuran Dasar - RevisiDokumen28 halamanRizky Aditya Nugraha - 201910201084 - Laporan Fisika Pengukuran Dasar - RevisiRizky AdityaBelum ada peringkat
- Cover SiskonDokumen2 halamanCover SiskonRizky AdityaBelum ada peringkat
- Makalah Sensor Dan AktuatorDokumen16 halamanMakalah Sensor Dan AktuatorRizky Aditya0% (1)
- Kwu CDokumen2 halamanKwu CRizky AdityaBelum ada peringkat
- Cover ElindDokumen2 halamanCover ElindRizky AdityaBelum ada peringkat
- Terjemahan MTK 1Dokumen3 halamanTerjemahan MTK 1Rizky AdityaBelum ada peringkat
- Laporan Line Foloower-1Dokumen12 halamanLaporan Line Foloower-1Rizky AdityaBelum ada peringkat
- ElindDokumen13 halamanElindRizky AdityaBelum ada peringkat
- KimiaDokumen3 halamanKimiaRizky AdityaBelum ada peringkat
- Bab 1,2,3-1Dokumen24 halamanBab 1,2,3-1Rizky AdityaBelum ada peringkat
- Laporan Fisika Getaran SelarasDokumen20 halamanLaporan Fisika Getaran SelarasRizky AdityaBelum ada peringkat
- Resume Tra KultamDokumen3 halamanResume Tra KultamRizky AdityaBelum ada peringkat
- Cover SensorDokumen2 halamanCover SensorRizky AdityaBelum ada peringkat
- Cover TraDokumen2 halamanCover TraRizky AdityaBelum ada peringkat