Anda mungkin juga menyukai
- JOB 8-Kendali P Tegangan GeneratorDokumen19 halamanJOB 8-Kendali P Tegangan GeneratorMuhammad Kevin MubarokBelum ada peringkat
- Kendali PID Motor DCDokumen22 halamanKendali PID Motor DCtasya aulia syifa putriBelum ada peringkat
- LAPORAN Job 6 - SKDDokumen15 halamanLAPORAN Job 6 - SKDtasya aulia syifa putriBelum ada peringkat
- LaporanPerc8 SKDDokumen17 halamanLaporanPerc8 SKDtasya aulia syifa putriBelum ada peringkat
- DImas Fatwa Saputra, Walizaqhi RIdhoallbis, Gilang Akra Besya, Aqmal Fajar PutraDokumen20 halamanDImas Fatwa Saputra, Walizaqhi RIdhoallbis, Gilang Akra Besya, Aqmal Fajar PutraZaqhi RidhoBelum ada peringkat
- Laporan Tugas Elektronika DayaDokumen32 halamanLaporan Tugas Elektronika DayaYoga AriawanBelum ada peringkat
- Bab IIDokumen16 halamanBab IIZhizul Kyuu RokuBelum ada peringkat
- LVDT (Jeffri, Royun)Dokumen21 halamanLVDT (Jeffri, Royun)muditowBelum ada peringkat
- Proposal KTI RotatingDokumen14 halamanProposal KTI RotatingYanzBelum ada peringkat
- 7 Muhammad Hafidz 2015031062 Percobaan 2Dokumen9 halaman7 Muhammad Hafidz 2015031062 Percobaan 2KangmasBelum ada peringkat
- Laporan Jam DigitalDokumen14 halamanLaporan Jam DigitalAniiisaa NurrrBelum ada peringkat
- Laporan Job7 - SKDDokumen13 halamanLaporan Job7 - SKDtasya aulia syifa putriBelum ada peringkat
- 3470-Article Text-8358-1-10-20200123 PDFDokumen8 halaman3470-Article Text-8358-1-10-20200123 PDFOsa KhoiruzzadBelum ada peringkat
- Laporan Best Projek Sem 1 (Syringe Pump)Dokumen22 halamanLaporan Best Projek Sem 1 (Syringe Pump)ramadhanpriyakuncaraBelum ada peringkat
- Laporan TPG2 (FARIS)Dokumen36 halamanLaporan TPG2 (FARIS)Faris A FBelum ada peringkat
- Paper VFD Kel 3 A2Dokumen10 halamanPaper VFD Kel 3 A2Adlan Bagus PradanaBelum ada peringkat
- Pengukuran Kecepatan Turbin PeltonDokumen10 halamanPengukuran Kecepatan Turbin PeltondimmykrnwnBelum ada peringkat
- Instalasi Motor 1 FasaDokumen13 halamanInstalasi Motor 1 FasaShofiuddinBelum ada peringkat
- Laporan DRIVER LN298NDokumen8 halamanLaporan DRIVER LN298Nm cn100% (1)
- BAB IIDokumen15 halamanBAB IISgr Eka 13Belum ada peringkat
- Timer/PWM/Motor DC Simulasi dan ImplementasiDokumen17 halamanTimer/PWM/Motor DC Simulasi dan ImplementasisalimBelum ada peringkat
- 1651043591tugas5 Prak - Fisika 2106184 Muhammad Iqbal Fathur RohmanDokumen4 halaman1651043591tugas5 Prak - Fisika 2106184 Muhammad Iqbal Fathur RohmanDanih Jian HidayatBelum ada peringkat
- LAPORAN PRAKTIKUM SENSOR INA219Dokumen22 halamanLAPORAN PRAKTIKUM SENSOR INA219Nanda PuspitaBelum ada peringkat
- BAB II Komponen ElektronikaDokumen9 halamanBAB II Komponen ElektronikaINDRA GUNAWANPEND.MATEMATIKABelum ada peringkat
- Sistem Pengisi IC Regulator dan AVRDokumen17 halamanSistem Pengisi IC Regulator dan AVRAdit Boediman0% (1)
- Timer PWM Motor DCDokumen28 halamanTimer PWM Motor DCelvianaBelum ada peringkat
- Eksperimen Gerak JatuhDokumen8 halamanEksperimen Gerak JatuhVhebry Idtuch PepyBelum ada peringkat
- Makalah EsuDokumen17 halamanMakalah EsuMuhamadIlhamBelum ada peringkat
- Lapres EltrinDokumen17 halamanLapres EltrinANANDABelum ada peringkat
- Battery Charger Otomatis Berbasis Mikrokontroler Untuk Lead Acid Battery 312v (Software)Dokumen9 halamanBattery Charger Otomatis Berbasis Mikrokontroler Untuk Lead Acid Battery 312v (Software)Kemal08Belum ada peringkat
- Sistem Kendali Kecepatan Motor DC Berbasis Arduino dengan Metode Open LoopDokumen12 halamanSistem Kendali Kecepatan Motor DC Berbasis Arduino dengan Metode Open LoopAndrea HinataBelum ada peringkat
- Modul Praktikum Motor Listrik Dalam IndustriDokumen35 halamanModul Praktikum Motor Listrik Dalam IndustriGhiffari AwliyaBelum ada peringkat
- Modul Eldas I S1Dokumen14 halamanModul Eldas I S1Robin Kerenzz AbiezzBelum ada peringkat
- PID BALANCING BALLDokumen14 halamanPID BALANCING BALLtitan gilarBelum ada peringkat
- TA FinalDokumen7 halamanTA FinalMuhammad Antisto AkbarBelum ada peringkat
- Percobaan 13Dokumen13 halamanPercobaan 13I Made WBelum ada peringkat
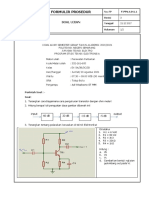
- BOOST KONVERTERDokumen12 halamanBOOST KONVERTERAliffatul Nur RoshitaBelum ada peringkat
- 2015 D3TT Modul Rangkaian ListrikDokumen68 halaman2015 D3TT Modul Rangkaian Listrikdeeare23Belum ada peringkat
- A1c319010 - Dea Alifia Fitri - Rangkaian PenyearahDokumen14 halamanA1c319010 - Dea Alifia Fitri - Rangkaian PenyearahDea Alif100% (1)
- PWMDokumen27 halamanPWMSatriani RahmayantiBelum ada peringkat
- Cara Kerja Dioda Sebagai Penyearah Arus ACDokumen16 halamanCara Kerja Dioda Sebagai Penyearah Arus ACAditya Dwi SugiartoBelum ada peringkat
- Mokhamad Indra Ridwan (20180230018) STAVOLTDokumen15 halamanMokhamad Indra Ridwan (20180230018) STAVOLTindra ridwanBelum ada peringkat
- Martina Erin Inang - Laporan Praktikum IIDokumen18 halamanMartina Erin Inang - Laporan Praktikum IIreynaldi adeBelum ada peringkat
- Laporan Motor ElektrikDokumen26 halamanLaporan Motor ElektrikNidia NahdaBelum ada peringkat
- Pengaturan Kecepatan Motor DCDokumen20 halamanPengaturan Kecepatan Motor DCMayangLarasati50% (2)
- LaporanDokumen21 halamanLaporanLudiyaBelum ada peringkat
- Laprak Project P.rianDokumen11 halamanLaprak Project P.rianAnanda PratamaBelum ada peringkat
- Tugas Kelompok Simulasi Kemudi Motor DC Dan AC Menggunakan Simulink - 207002053 - Cucu Sohihudin - 207002063 - Lingga WiyandiDokumen10 halamanTugas Kelompok Simulasi Kemudi Motor DC Dan AC Menggunakan Simulink - 207002053 - Cucu Sohihudin - 207002063 - Lingga WiyandiLingga WiyandiBelum ada peringkat
- OPTIMASI PEMBAYARAN LISTRIKDokumen5 halamanOPTIMASI PEMBAYARAN LISTRIKNehen MiasBelum ada peringkat
- MONITORING DAYADokumen6 halamanMONITORING DAYAGowther GowtherBelum ada peringkat
- Laprak 3 Pulsa GeneratorDokumen13 halamanLaprak 3 Pulsa GeneratorRiffatunnisa Fauziah HanumBelum ada peringkat
- RANCANGDokumen7 halamanRANCANGComenderBataliaonBlackBelum ada peringkat
- 1027 3020 1 SMDokumen5 halaman1027 3020 1 SMblack lordBelum ada peringkat
- Desain Robot Line TracerDokumen12 halamanDesain Robot Line TracerGiriBelum ada peringkat
- Makalah PenelitianDokumen40 halamanMakalah PenelitianCurhat Empat DelapanBelum ada peringkat
- MAKALAH PengisianDokumen26 halamanMAKALAH PengisianAbdi BagariangBelum ada peringkat
- ELEKTRONIKA LABDokumen15 halamanELEKTRONIKA LABFebriyanti SBelum ada peringkat
- Kelompok 2 - LT 2e - Laporan Variable Speed DriveDokumen11 halamanKelompok 2 - LT 2e - Laporan Variable Speed DriveJonghyun KimBelum ada peringkat
- Cara Meningkatkan Stabilitas Sistem Pengendalian Plant Beam Ball Dengan Menggunakan Kontrol P, PI, dan PIDDokumen7 halamanCara Meningkatkan Stabilitas Sistem Pengendalian Plant Beam Ball Dengan Menggunakan Kontrol P, PI, dan PIDFeby AdiantaBelum ada peringkat
- LSKD - EK3A - 08 - Feby Adianta - MotorDokumen3 halamanLSKD - EK3A - 08 - Feby Adianta - MotorFeby AdiantaBelum ada peringkat
- Webminar OT Creation Smrt HealthcareDokumen2 halamanWebminar OT Creation Smrt HealthcareFeby AdiantaBelum ada peringkat
- Ball & Beam 2: Pid Controller 1. Function Transfer P ControllerDokumen11 halamanBall & Beam 2: Pid Controller 1. Function Transfer P ControllerFeby AdiantaBelum ada peringkat
- Percobaan 1Dokumen5 halamanPercobaan 1Feby AdiantaBelum ada peringkat
- EK3A - Tes - Lab - KBK2 - 08 - Feby AdiantaDokumen4 halamanEK3A - Tes - Lab - KBK2 - 08 - Feby AdiantaFeby AdiantaBelum ada peringkat
- EndTest - KBKII - Feby AdiantaDokumen4 halamanEndTest - KBKII - Feby AdiantaFeby AdiantaBelum ada peringkat
- 5e. AC-DC 3 FasaDokumen15 halaman5e. AC-DC 3 FasaFeby AdiantaBelum ada peringkat
- 5932 15630 1 PBDokumen8 halaman5932 15630 1 PBFeby AdiantaBelum ada peringkat
- 5a. AC-DC 1 Fasa PDFDokumen13 halaman5a. AC-DC 1 Fasa PDFFeby AdiantaBelum ada peringkat
- Full PDFDokumen70 halamanFull PDFmega silviaBelum ada peringkat
- 5a. AC-DC 1 Fasa PDFDokumen13 halaman5a. AC-DC 1 Fasa PDFFeby AdiantaBelum ada peringkat
- Hpli QMT vMGYXkiaHTkDuSv6yWAIBUlvikdpn1ugE3K3fNZSC2dRctiv1 - WGtOeRlAYXC2bqPbdlEHmuSeMpDYp2s6QnU8wYQbRtdRYstgDokumen3 halamanHpli QMT vMGYXkiaHTkDuSv6yWAIBUlvikdpn1ugE3K3fNZSC2dRctiv1 - WGtOeRlAYXC2bqPbdlEHmuSeMpDYp2s6QnU8wYQbRtdRYstgFeby AdiantaBelum ada peringkat
- Zero Crossing Detector Berfungsi Untuk Mendeteksi Perpotongan Gelombang Sinus Pada Tegangan AC Dengan Zero Point Tegangan AC TersebutDokumen1 halamanZero Crossing Detector Berfungsi Untuk Mendeteksi Perpotongan Gelombang Sinus Pada Tegangan AC Dengan Zero Point Tegangan AC TersebutFeby AdiantaBelum ada peringkat
- Presentation 1Dokumen8 halamanPresentation 1Feby AdiantaBelum ada peringkat
- Etika, Etos Kerja dan Sikap ProfessionalDokumen6 halamanEtika, Etos Kerja dan Sikap Professionalgugun kurniawanBelum ada peringkat
- Buku Saku GIDokumen28 halamanBuku Saku GIFeby AdiantaBelum ada peringkat
- STEMPELDokumen1 halamanSTEMPELFeby AdiantaBelum ada peringkat
- Makalah Motor ServoDokumen9 halamanMakalah Motor ServoLaras Widyawati Cakradiwangsa67% (3)
- Perawatan Perbaikan - UAS-20-21 - Adi WisaksonoDokumen2 halamanPerawatan Perbaikan - UAS-20-21 - Adi WisaksonoFeby AdiantaBelum ada peringkat
- Makalah Motor ServoDokumen9 halamanMakalah Motor ServoLaras Widyawati Cakradiwangsa67% (3)
- Proposal PKL PT Kai Semarangg-2Dokumen9 halamanProposal PKL PT Kai Semarangg-2Feby AdiantaBelum ada peringkat
- YgygDokumen8 halamanYgygFeby AdiantaBelum ada peringkat
- Bukti Pendaftaran Beasiswa Toyota dan Astra 2019Dokumen1 halamanBukti Pendaftaran Beasiswa Toyota dan Astra 2019Feby AdiantaBelum ada peringkat
- Makalah Motor ServoDokumen9 halamanMakalah Motor ServoLaras Widyawati Cakradiwangsa67% (3)
- File5Dokumen22 halamanFile5Feby AdiantaBelum ada peringkat
- Proposal PKL PT Kai Semarangg-1Dokumen9 halamanProposal PKL PT Kai Semarangg-1Feby AdiantaBelum ada peringkat
- Praktek 3AVR - D4 KeypadDokumen8 halamanPraktek 3AVR - D4 KeypadvickyBelum ada peringkat
- Analisis Rangkaian Listrik Jilid 11Dokumen351 halamanAnalisis Rangkaian Listrik Jilid 11Ira Sartika AnderianiBelum ada peringkat