Anda mungkin juga menyukai
- PLN MengajarDokumen42 halamanPLN MengajarBebek BakarBelum ada peringkat
- Modul MapInfo Pftlabz 2012Dokumen68 halamanModul MapInfo Pftlabz 2012brell_e_brell100% (2)
- Sop Penerbangan Drone Dji Phantom 4Dokumen9 halamanSop Penerbangan Drone Dji Phantom 4RRBelum ada peringkat
- Sop DroneDokumen7 halamanSop DroneJulian AssadatBelum ada peringkat
- Kabupaten Kutai Barat Dalam Angka 2018Dokumen396 halamanKabupaten Kutai Barat Dalam Angka 2018Annisa Nafa100% (1)
- Proposal UavDokumen8 halamanProposal UavEmil Jati NugrohoBelum ada peringkat
- 2021 - Modul Drone & Arcgis DasarDokumen77 halaman2021 - Modul Drone & Arcgis Dasarnuri nuii100% (2)
- Sosialisasi Ketenagalistrikan KediriDokumen30 halamanSosialisasi Ketenagalistrikan KediriFebriandy RizkiBelum ada peringkat
- Kinerja BKPRD Dalam Penyelenggaraan Penataan Ruang Di Provinsi Sumatera BaratDokumen48 halamanKinerja BKPRD Dalam Penyelenggaraan Penataan Ruang Di Provinsi Sumatera BaratPUSTAKA Virtual Tata Ruang dan Pertanahan (Pusvir TRP)100% (2)
- Tutorial Agisoft Tanpa GCPDokumen18 halamanTutorial Agisoft Tanpa GCPElang MengantukBelum ada peringkat
- Checklist Mobilisasi DM Pengeboran Peledakan-2Dokumen37 halamanChecklist Mobilisasi DM Pengeboran Peledakan-2Billy AradheaBelum ada peringkat
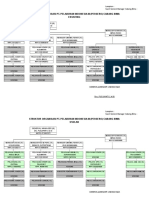
- Struktur OrganisasiDokumen5 halamanStruktur OrganisasiNur YhaniBelum ada peringkat
- Modul Drone TrainingDokumen16 halamanModul Drone TrainingDesa Karya IndahBelum ada peringkat
- Matriks (Jalan)Dokumen22 halamanMatriks (Jalan)Hasra HasbaBelum ada peringkat
- Proses Orthorektifikasi Untuk Pengolahan Data Citra Satelit Resolusi Tinggi PDFDokumen123 halamanProses Orthorektifikasi Untuk Pengolahan Data Citra Satelit Resolusi Tinggi PDFRiandiasa DindaBelum ada peringkat
- Uji Akurasi Peta DasarDokumen17 halamanUji Akurasi Peta DasarANGGARA100% (1)
- Foto Udara Menggunakan Wahana Uav Jenis Fix WingDokumen6 halamanFoto Udara Menggunakan Wahana Uav Jenis Fix WingSudung SitumorangBelum ada peringkat
- Laporan Samarinda Ulu Fixed3Dokumen47 halamanLaporan Samarinda Ulu Fixed3Slamet RiadiBelum ada peringkat
- Clauses Ear Munich Re Wordings BilingualDokumen20 halamanClauses Ear Munich Re Wordings Bilingualboby0% (1)
- Petunjuk Pengoperasian Aplikasi: Modul Verifikasi Pelaporan (MVP)Dokumen53 halamanPetunjuk Pengoperasian Aplikasi: Modul Verifikasi Pelaporan (MVP)John AminartaBelum ada peringkat
- Jawaban Pertanyaan Aspek Teknik Pertambangan PDFDokumen20 halamanJawaban Pertanyaan Aspek Teknik Pertambangan PDFIT Sulsel100% (1)
- WI-HSE - 01 Pengoprasian ExcavatorDokumen13 halamanWI-HSE - 01 Pengoprasian ExcavatorFery RamdaniBelum ada peringkat
- Video 11Dokumen152 halamanVideo 11Yugi GloryBelum ada peringkat
- Drone OperationDokumen6 halamanDrone Operation11. GUSNIA KHAIRUNNISA SIREGAR. LLU 27Belum ada peringkat
- SOP - Electric CompressorDokumen4 halamanSOP - Electric CompressorSadamBelum ada peringkat
- Jadwal Diklat ASMKP Angkatan XI - 2022Dokumen7 halamanJadwal Diklat ASMKP Angkatan XI - 2022Fahmi NoviandriBelum ada peringkat
- Drone Flight TrainingDokumen35 halamanDrone Flight TrainingMoe AerialBelum ada peringkat
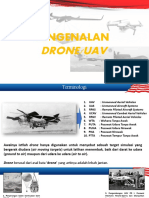
- Pengenalan DroneDokumen17 halamanPengenalan DroneAr UnBelum ada peringkat
- Kode - Unsur 1Dokumen12 halamanKode - Unsur 1Rian WibowoBelum ada peringkat
- Perawatan DroneDokumen6 halamanPerawatan DroneZiebaRezkiBelum ada peringkat
- Paparan SMP Ditpamobvit Polda SulselDokumen37 halamanPaparan SMP Ditpamobvit Polda Sulselwenny dianaBelum ada peringkat
- RPP Tentang Penyelenggaraan Perizinan Berusaha Berbasis ResikoDokumen444 halamanRPP Tentang Penyelenggaraan Perizinan Berusaha Berbasis ResikoIraoneFebryBelum ada peringkat
- Survei Landas Kontinen Indonesia Menggunakan Teknologi Survei SeismikDokumen10 halamanSurvei Landas Kontinen Indonesia Menggunakan Teknologi Survei Seismikteguh fayakun alif100% (1)
- Pengertian, Bagian Dan Contoh Term of Reference (TOR) - PujionoDokumen5 halamanPengertian, Bagian Dan Contoh Term of Reference (TOR) - PujionodhaniBelum ada peringkat
- Sop Yan Senpi Dan HandakDokumen9 halamanSop Yan Senpi Dan HandakPapeda PapuaBelum ada peringkat
- 10 KAK Inventarisasi Sungai-Sungai Rawan Bencana Di Sumatera BaratDokumen13 halaman10 KAK Inventarisasi Sungai-Sungai Rawan Bencana Di Sumatera BaratSEGER PRIMA UTAMABelum ada peringkat
- Modul Penggunaan Garmin Gps PDFDokumen25 halamanModul Penggunaan Garmin Gps PDFZaini AriefBelum ada peringkat
- Brosur LSP IsiDokumen2 halamanBrosur LSP IsiYusup Hendra PerkasaBelum ada peringkat
- Materi Sosialisasi PM 37 Tahun 2020Dokumen18 halamanMateri Sosialisasi PM 37 Tahun 2020Rajandra NurhadiBelum ada peringkat
- Pelaksanaan Survei GPSDokumen14 halamanPelaksanaan Survei GPSAditya NugrahaBelum ada peringkat
- STD EXP 2017-10-001 Safety Mapping GuidelineDokumen10 halamanSTD EXP 2017-10-001 Safety Mapping GuidelineSlamet SetyowibowoBelum ada peringkat
- 01 - Proposal Penawaran UAVDokumen18 halaman01 - Proposal Penawaran UAVkidgoatBelum ada peringkat
- Booklet GEO 2021 - FIXDokumen48 halamanBooklet GEO 2021 - FIXsantoso100% (1)
- M7 - SPSA - Pengolahan Data LiDAR - Wulan Arnianti - 483387Dokumen23 halamanM7 - SPSA - Pengolahan Data LiDAR - Wulan Arnianti - 483387Wulan ArniantiBelum ada peringkat
- SE Menperin No. 5 Tahun 2021Dokumen11 halamanSE Menperin No. 5 Tahun 2021indahBelum ada peringkat
- Paparan Karosunluhkum - Peran Satpam Pemilu 2019Dokumen19 halamanPaparan Karosunluhkum - Peran Satpam Pemilu 2019Uray Mohammad FachriansyahBelum ada peringkat
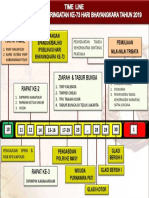
- Timeline Hut Bhayangkara Ke-73 Tahun 2019 PDFDokumen1 halamanTimeline Hut Bhayangkara Ke-73 Tahun 2019 PDFBagsumdaresbaselBelum ada peringkat
- Buku Petunjuk Pelaksanaan Supervisi Pemetaan Dasar Rupabumi Versi 1.0Dokumen91 halamanBuku Petunjuk Pelaksanaan Supervisi Pemetaan Dasar Rupabumi Versi 1.0Fajrin YaBelum ada peringkat
- Pemetaan Drone Dengan Pix4dDokumen43 halamanPemetaan Drone Dengan Pix4dStevenBelum ada peringkat
- Dji Phantom 4 ProDokumen4 halamanDji Phantom 4 ProAndre ApriharyandiBelum ada peringkat
- Flight PlanningDokumen11 halamanFlight PlanningNainBelum ada peringkat
- Guide Nikon XS Series Sub Indonesia by Samehadaku - Tv.en - Id PDFDokumen201 halamanGuide Nikon XS Series Sub Indonesia by Samehadaku - Tv.en - Id PDFRizky ItsukaBelum ada peringkat
- Kamus Teknik PuDokumen243 halamanKamus Teknik PuAsep Yadi SuhermanBelum ada peringkat
- Cara Menghitung Jarak Antar KoordinatDokumen1 halamanCara Menghitung Jarak Antar KoordinatFransisco RediBelum ada peringkat
- PT ASI Pudjiastuti GeosurveyDokumen4 halamanPT ASI Pudjiastuti GeosurveybernaduscaturBelum ada peringkat
- Pelatihan Drone Giz KaltaraDokumen85 halamanPelatihan Drone Giz KaltaraAries ForesterBelum ada peringkat
- Prosedur Akuisisi Citra Menggunakan Drone Dji Inspire 1Dokumen14 halamanProsedur Akuisisi Citra Menggunakan Drone Dji Inspire 1WahekokBelum ada peringkat
- Dji GoDokumen38 halamanDji GoDarmadiBelum ada peringkat
- Pedoman Praktikum DJI Go2Dokumen28 halamanPedoman Praktikum DJI Go2pempi mlgBelum ada peringkat