Anda mungkin juga menyukai
- Atenuasi Gelombang ElastikDokumen18 halamanAtenuasi Gelombang ElastikMetaningrumBelum ada peringkat
- Pengolahan Data Seismik 2D Menggunakan Software Echos Dari Paradigm 14.1Dokumen13 halamanPengolahan Data Seismik 2D Menggunakan Software Echos Dari Paradigm 14.1Rahmat Hidayat100% (1)
- Praktikum MikrokontrolerDokumen29 halamanPraktikum MikrokontrolerAndika Surya HadiwinataBelum ada peringkat
- Hiposenter Metode Lima LingkaranDokumen9 halamanHiposenter Metode Lima LingkaranSthevanie DhitaBelum ada peringkat
- Analisis Data GeofisikaDokumen45 halamanAnalisis Data GeofisikaMalik NaSutionBelum ada peringkat
- Vektor Dan Tensor byDokumen96 halamanVektor Dan Tensor byulinBelum ada peringkat
- Lokasi Gempa Bumi (Praktik)Dokumen7 halamanLokasi Gempa Bumi (Praktik)Otniel PutraBelum ada peringkat
- RheologyDokumen7 halamanRheologyAndy RachmadanBelum ada peringkat
- VESSSSDokumen33 halamanVESSSSrama ramaBelum ada peringkat
- Metode MTDokumen34 halamanMetode MTalfiBelum ada peringkat
- Tugas Resume Persamaan Gelombang SeismikDokumen5 halamanTugas Resume Persamaan Gelombang SeismikFitryza RahmisariBelum ada peringkat
- SIstem Kontrol Multivariabel - Canonical ControllerDokumen14 halamanSIstem Kontrol Multivariabel - Canonical ControllerArifaldy SatriadiBelum ada peringkat
- HIDROGEOFISIKADokumen17 halamanHIDROGEOFISIKAalmubdyBelum ada peringkat
- Laporan Praktikum Metode SeismikDokumen26 halamanLaporan Praktikum Metode SeismikFian FakhruddinBelum ada peringkat
- PDP HiperbolikDokumen24 halamanPDP HiperbolikMan Min RinBelum ada peringkat
- Laporan Ujian Akhir SemesterDokumen15 halamanLaporan Ujian Akhir Semesterlia andri anggraeniBelum ada peringkat
- GEOFIZIKA: RECTANGULAR DAN BLACKMAN WINDOWINGDokumen8 halamanGEOFIZIKA: RECTANGULAR DAN BLACKMAN WINDOWINGAnonymous PxbpnAi4sBelum ada peringkat
- BATUBARA REGIONALDokumen32 halamanBATUBARA REGIONALmahasiswa biasaBelum ada peringkat
- Usaha Dan Energi-Dikonversi IINDokumen31 halamanUsaha Dan Energi-Dikonversi IINuser 1001Belum ada peringkat
- TOPOGRAFI TSDokumen21 halamanTOPOGRAFI TSFarhan. MuhammadBelum ada peringkat
- Laporan Praktikum Modul 2 Andi Elistiana 42219031Dokumen25 halamanLaporan Praktikum Modul 2 Andi Elistiana 42219031Alika Anugrah RamdaniBelum ada peringkat
- Proposal KP PT Timah BangkaDokumen13 halamanProposal KP PT Timah BangkaHena Suri Intan PertiwiBelum ada peringkat
- Sistem dokumentasi dan ketelusuran pengukuran pada laboratorium pengujianDokumen11 halamanSistem dokumentasi dan ketelusuran pengukuran pada laboratorium pengujianfaridawati100% (1)
- DEKOMPOSISIDokumen12 halamanDEKOMPOSISIverasarah simatupangBelum ada peringkat
- Tugas Besar Anton Nugroho 13117017 PMC RBDokumen20 halamanTugas Besar Anton Nugroho 13117017 PMC RBAnton NugrohoBelum ada peringkat
- Konvolusi, Korelasi dan FFTDokumen20 halamanKonvolusi, Korelasi dan FFTKinanBelum ada peringkat
- Macam Alat GeomagnetDokumen5 halamanMacam Alat GeomagnetronaldBelum ada peringkat
- 13.terpadu 3G Sumani FixDokumen14 halaman13.terpadu 3G Sumani FixakenBelum ada peringkat
- Respon FrekuensiDokumen21 halamanRespon FrekuensiduelxBelum ada peringkat
- Laporan Praktikum Teknologi Sensor - MagnetometerDokumen13 halamanLaporan Praktikum Teknologi Sensor - MagnetometerA Dagna PBelum ada peringkat
- SEISMIC REFRAKSIDokumen23 halamanSEISMIC REFRAKSIKurnia ChandraBelum ada peringkat
- Laporan Fisika Komputasi 2, Pengenalan MatlabDokumen20 halamanLaporan Fisika Komputasi 2, Pengenalan MatlabGinanjarBelum ada peringkat
- Analisis Stabilitas Lereng Menggunakan Metode BishopDokumen5 halamanAnalisis Stabilitas Lereng Menggunakan Metode BishopAmrita Oza NabillaBelum ada peringkat
- Survey Elektromagnetik PDFDokumen27 halamanSurvey Elektromagnetik PDFWildan Ichsan SabilaBelum ada peringkat
- Modul Kuliah Lapangan 2020 LeniDokumen26 halamanModul Kuliah Lapangan 2020 LeniLeni NurilBelum ada peringkat
- K1C016057 - Tugas 1Dokumen20 halamanK1C016057 - Tugas 1Dini Amaliah LuthfiBelum ada peringkat
- Osilasi Harmonik Mekanik Dan ListrikDokumen8 halamanOsilasi Harmonik Mekanik Dan Listriknurul kartikaBelum ada peringkat
- Modul SinyalDokumen25 halamanModul SinyalCacha Natasha100% (1)
- Modul Prak ASGDokumen41 halamanModul Prak ASGOkta VianaBelum ada peringkat
- Metoda Numerik Untuk Solusi Rangkaian Listrik Menggunakan MatlabDokumen23 halamanMetoda Numerik Untuk Solusi Rangkaian Listrik Menggunakan MatlabnirwansyahekabBelum ada peringkat
- MektumDokumen11 halamanMektumyen yustinaBelum ada peringkat
- OPTIMASI BERKENDALADokumen9 halamanOPTIMASI BERKENDALADiska ArmeinaBelum ada peringkat
- Cekungan NiasDokumen16 halamanCekungan Niassanugrah17Belum ada peringkat
- Membuat Diagram TS dengan ODVDokumen12 halamanMembuat Diagram TS dengan ODVTaufik R. IrkhamiBelum ada peringkat
- Tutorial Olah Data Gravitasi CitraDokumen1 halamanTutorial Olah Data Gravitasi Citramuariff yudhaBelum ada peringkat
- Program SvalDokumen17 halamanProgram SvalDebora Grayselia Sitepu100% (1)
- Gaya GravitasiDokumen12 halamanGaya GravitasivaniafildzaBelum ada peringkat
- Convolution (Theory and Matlab)Dokumen4 halamanConvolution (Theory and Matlab)Jans HendryBelum ada peringkat
- Pengenalan Dan Akuisisi Data Metode MagnetotelluricDokumen47 halamanPengenalan Dan Akuisisi Data Metode MagnetotelluricBerliana AyuBelum ada peringkat
- Laporan Praktikum Akuisisi Data SeismikDokumen7 halamanLaporan Praktikum Akuisisi Data SeismikbertangkaidaunBelum ada peringkat
- Script UTS GRID SEARCHDokumen4 halamanScript UTS GRID SEARCHAdri PrawiraBelum ada peringkat
- Laporan Fisika DasarDokumen113 halamanLaporan Fisika DasarIrfan HalimBelum ada peringkat
- Laporan Praktikum IIDokumen15 halamanLaporan Praktikum II1214511029Belum ada peringkat
- Problem Set 2Dokumen2 halamanProblem Set 2AlfonsaHansBelum ada peringkat
- Discrete Fourier Transform (DFT)Dokumen7 halamanDiscrete Fourier Transform (DFT)yohanes adamBelum ada peringkat
- Bab 1 Teori KonvolusiDokumen11 halamanBab 1 Teori KonvolusiBerlian Siregar100% (1)
- Resonansi Bangunan Dengan Analisis Mikrotermor Di Dusun Patuk Kabupaten Gunung KidulDokumen116 halamanResonansi Bangunan Dengan Analisis Mikrotermor Di Dusun Patuk Kabupaten Gunung KidulTri Putra SimangunsongBelum ada peringkat
- Metode Gauss-Jordan Dengan PythonDokumen3 halamanMetode Gauss-Jordan Dengan PythonRio Agustian Gilang FernandoBelum ada peringkat
- Uji BahanDokumen6 halamanUji BahanAhmad Rendi MaulanaBelum ada peringkat
- Pengertian Sistem LinierDokumen18 halamanPengertian Sistem Liniermhafidz49Belum ada peringkat
- Pembelahan Sel dan Pewarisan SifatDokumen32 halamanPembelahan Sel dan Pewarisan Sifatputri wulandariBelum ada peringkat
- Atmosfer BumiDokumen2 halamanAtmosfer Bumiputri wulandariBelum ada peringkat
- M02 Pasang SurutDokumen8 halamanM02 Pasang Surutputri wulandariBelum ada peringkat
- Tugas 2 SIGDokumen6 halamanTugas 2 SIGputri wulandariBelum ada peringkat
- Seismologi Dan Gempa Bumi111Dokumen41 halamanSeismologi Dan Gempa Bumi111putri wulandariBelum ada peringkat
- Bab I Struktur Atom ADokumen31 halamanBab I Struktur Atom Aputri wulandariBelum ada peringkat
- M04 Pasang SurutDokumen20 halamanM04 Pasang Surutputri wulandariBelum ada peringkat
- Curah Hujan TRMMDokumen28 halamanCurah Hujan TRMMputri wulandariBelum ada peringkat
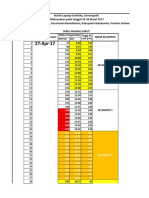
- Data Pasang Surut Kulap 17Dokumen18 halamanData Pasang Surut Kulap 17putri wulandariBelum ada peringkat
- M03 Pasang SurutDokumen8 halamanM03 Pasang Surutputri wulandariBelum ada peringkat
- PETIRDokumen3 halamanPETIRputri wulandariBelum ada peringkat
- M02 Pasang SurutDokumen8 halamanM02 Pasang Surutputri wulandariBelum ada peringkat
- Kelompok 1 Cuaca IklimDokumen23 halamanKelompok 1 Cuaca Iklimputri wulandariBelum ada peringkat
- Bab I Struktur Atom ADokumen31 halamanBab I Struktur Atom Aputri wulandariBelum ada peringkat
- Tugas Inversi 3Dokumen10 halamanTugas Inversi 3putri wulandariBelum ada peringkat
- Rekonstruksi 1Dokumen2 halamanRekonstruksi 1putri wulandariBelum ada peringkat
- Tugas Inversi 4Dokumen4 halamanTugas Inversi 4putri wulandariBelum ada peringkat
- Rekonstruksi 3Dokumen9 halamanRekonstruksi 3putri wulandariBelum ada peringkat
- Tugas Inversi 5Dokumen12 halamanTugas Inversi 5putri wulandariBelum ada peringkat
- 5 Momentum Linier & TumbukanDokumen18 halaman5 Momentum Linier & Tumbukanputri wulandariBelum ada peringkat
- Kelompok 7Dokumen24 halamanKelompok 7putri wulandariBelum ada peringkat
- 11 OptikDokumen26 halaman11 Optikputri wulandariBelum ada peringkat
- I HidroDokumen9 halamanI Hidroputri wulandariBelum ada peringkat
- 2 Kinematika & DinamikaDokumen50 halaman2 Kinematika & Dinamikaputri wulandariBelum ada peringkat
- Persamaan PoissonDokumen10 halamanPersamaan Poissonputri wulandariBelum ada peringkat
- Kelompok 1 Cuaca IklimDokumen23 halamanKelompok 1 Cuaca Iklimputri wulandariBelum ada peringkat
- 6 FluidaDokumen34 halaman6 Fluidaputri wulandari100% (1)
- Ebook Meterologi DasarDokumen4 halamanEbook Meterologi Dasarputri wulandariBelum ada peringkat
- Mengenal Efek Cuaca Bagi PenerbanganDokumen4 halamanMengenal Efek Cuaca Bagi Penerbanganputri wulandariBelum ada peringkat
- Kelompok 1 Cuaca IklimDokumen23 halamanKelompok 1 Cuaca Iklimputri wulandariBelum ada peringkat