Anda mungkin juga menyukai
- Kadri R Lawa - POKD7Dokumen8 halamanKadri R Lawa - POKD7KADRIBelum ada peringkat
- Laporan Praktikum Motor ServoDokumen15 halamanLaporan Praktikum Motor ServoNurul Muthmainnah Jaskidas100% (1)
- None 9b1f141dDokumen6 halamanNone 9b1f141dartismmgBelum ada peringkat
- Modul EL3215 Sistem Kenadli Semester 1 2018-2019 FIX Sisken (55 Buku - Cover No49)Dokumen43 halamanModul EL3215 Sistem Kenadli Semester 1 2018-2019 FIX Sisken (55 Buku - Cover No49)Fanji PratamaBelum ada peringkat
- Tugas MekatronikaDokumen6 halamanTugas MekatronikaSeptian Rio Dwi CahyoBelum ada peringkat
- Makalah Mikroprosesor RANCANGAN PEMBUATAN PINTU OTOMATIS SATU ARAH BERBASIS MIKROKONTROLER ATMega 8535 MENGGUNAKAN DOUBLE IRDokumen14 halamanMakalah Mikroprosesor RANCANGAN PEMBUATAN PINTU OTOMATIS SATU ARAH BERBASIS MIKROKONTROLER ATMega 8535 MENGGUNAKAN DOUBLE IRFauzie Dheby IrawanBelum ada peringkat
- Modul EL3215 Sistem Kenadli Semester 1 2018-2019 FIX Sisken (55 Buku - Cover No49) PDFDokumen43 halamanModul EL3215 Sistem Kenadli Semester 1 2018-2019 FIX Sisken (55 Buku - Cover No49) PDFAbib Muhammad AliBelum ada peringkat
- Praktikum Teknologi Aktuator - Servo Kecepatan Motor DC BrushedDokumen34 halamanPraktikum Teknologi Aktuator - Servo Kecepatan Motor DC BrushedBianca NobeliaBelum ada peringkat
- 4 - M.Rhandy Tri Gustino - 13116086 - EL3203 - Fauzan Ghozi Al-AyubiDokumen7 halaman4 - M.Rhandy Tri Gustino - 13116086 - EL3203 - Fauzan Ghozi Al-AyubifauzanghozialayubiBelum ada peringkat
- LaporanDokumen21 halamanLaporanLudiyaBelum ada peringkat
- Simulasi Robot Kontrol Digital Menggunakan Remot KabelDokumen31 halamanSimulasi Robot Kontrol Digital Menggunakan Remot KabelYusuf SigitBelum ada peringkat
- LAPLENGKAP - MEKATRONIKA - PERT13 - Nur FachirahDokumen26 halamanLAPLENGKAP - MEKATRONIKA - PERT13 - Nur FachirahNur FachirahBelum ada peringkat
- Pengaturan Putaran Motor DCDokumen8 halamanPengaturan Putaran Motor DCJoel HariekBelum ada peringkat
- (DSK) (AM) (8) Rozan Ariq ZhalifunnasDokumen13 halaman(DSK) (AM) (8) Rozan Ariq ZhalifunnasRozan Ariq ZhalifunnasBelum ada peringkat
- FuzzyMikro With Cover Page v2Dokumen7 halamanFuzzyMikro With Cover Page v2Aljira AmaralBelum ada peringkat
- Pengendali Motor DC Dengan Mikrokontroler ATmega8535Dokumen6 halamanPengendali Motor DC Dengan Mikrokontroler ATmega8535Muhammad Yusuf100% (1)
- Makalah Mikrokontroler At89s51Dokumen10 halamanMakalah Mikrokontroler At89s51sigitamdBelum ada peringkat
- 1395-Article Text-3932-1-10-20180809Dokumen4 halaman1395-Article Text-3932-1-10-20180809Nasry Putra Bungsu MoBelum ada peringkat
- Jobsheet 1 - Identifikasi Elektronik - Mini CNCDokumen6 halamanJobsheet 1 - Identifikasi Elektronik - Mini CNCSyafrizal GhifariBelum ada peringkat
- PAPER Ni Luh Putu Andrea 1105121153Dokumen5 halamanPAPER Ni Luh Putu Andrea 1105121153Andrea MaurillaBelum ada peringkat
- Kontrol Motor Servo Dengan Menggunakan PIDDokumen14 halamanKontrol Motor Servo Dengan Menggunakan PIDFairuzy QonitahBelum ada peringkat
- Pembahasan PraktikumDokumen12 halamanPembahasan PraktikumPunq NiawatiBelum ada peringkat
- Modul Prak PLC SiemensDokumen31 halamanModul Prak PLC SiemensAhmad Hudin Fauzi 'ujik'Belum ada peringkat
- Praktikum SPDDokumen43 halamanPraktikum SPDM Rizal RBelum ada peringkat
- Laporan PSKO - Pemrograman Arm RobotDokumen17 halamanLaporan PSKO - Pemrograman Arm RobotYova ApriliaBelum ada peringkat
- Mokhamad Indra Ridwan (20180230018) STAVOLTDokumen15 halamanMokhamad Indra Ridwan (20180230018) STAVOLTindra ridwanBelum ada peringkat
- PRAKTIKUM 03 - Pratikum Kendali PDDokumen7 halamanPRAKTIKUM 03 - Pratikum Kendali PDAgnes AgithaBelum ada peringkat
- Modul Antarmuka Aktuator 2 (Motor)Dokumen7 halamanModul Antarmuka Aktuator 2 (Motor)aulia andre wibowoBelum ada peringkat
- Modul Antarmuka Aktuator 2 (Motor)Dokumen7 halamanModul Antarmuka Aktuator 2 (Motor)etdsBelum ada peringkat
- Modul p1 Spo 2023Dokumen10 halamanModul p1 Spo 2023Dimas AnandaBelum ada peringkat
- LVDT (Jeffri, Royun)Dokumen21 halamanLVDT (Jeffri, Royun)muditowBelum ada peringkat
- Laporan Praktikum Sistem Kontrol Awm AktuatorDokumen13 halamanLaporan Praktikum Sistem Kontrol Awm AktuatorXcv TeguhBelum ada peringkat
- Pertanyaan Pelamar Bagian EngineeringDokumen4 halamanPertanyaan Pelamar Bagian EngineeringMuhamad IskandarBelum ada peringkat
- Sistem Kontrol Motor DC1Dokumen6 halamanSistem Kontrol Motor DC1ArieBelum ada peringkat
- Auto Tuning PID Controller Untuk Mengendalikan Kecepatan DC Gripper 5 JariDokumen6 halamanAuto Tuning PID Controller Untuk Mengendalikan Kecepatan DC Gripper 5 JariYohan Krisnandi PutraBelum ada peringkat
- MODUL PRAKTIKUM Sistem Kendali Pltek GTDokumen33 halamanMODUL PRAKTIKUM Sistem Kendali Pltek GTCend AkhinovBelum ada peringkat
- Bab II Dasar TeoriDokumen11 halamanBab II Dasar TeoriAdy A.S.PBelum ada peringkat
- Laporan Best Projek Sem 1 (Syringe Pump)Dokumen22 halamanLaporan Best Projek Sem 1 (Syringe Pump)ramadhanpriyakuncaraBelum ada peringkat
- Eldas Pertemuan 10 Sampai 14Dokumen25 halamanEldas Pertemuan 10 Sampai 14defiyulianti17Belum ada peringkat
- Jobsheet 2 PDFDokumen9 halamanJobsheet 2 PDFTiara Septiani NurcahyaniBelum ada peringkat
- Neural Network Based Closed Loop Kontrol Kecepatan Motor DC Menggunakan Arduino UnoDokumen6 halamanNeural Network Based Closed Loop Kontrol Kecepatan Motor DC Menggunakan Arduino UnoMuhammad Yusuf ThauziriBelum ada peringkat
- PLC Cj1m PIDDokumen27 halamanPLC Cj1m PIDAulia rahmaBelum ada peringkat
- Perangkat Kendali Dasar - Relay, Timer Dan Counter - Jago OtomasiDokumen8 halamanPerangkat Kendali Dasar - Relay, Timer Dan Counter - Jago OtomasidzikavicBelum ada peringkat
- Program Kreativitas Mahasiswa Gorden OtomatisDokumen15 halamanProgram Kreativitas Mahasiswa Gorden OtomatisIndra PrasetiyoBelum ada peringkat
- UTS MegatronDokumen10 halamanUTS MegatronIrma Vania RahmaBelum ada peringkat
- Laporan Praktikum Motor Servo IbraDokumen6 halamanLaporan Praktikum Motor Servo IbraAhmad MukhaidirBelum ada peringkat
- Bahan Materi Training ETAPDokumen10 halamanBahan Materi Training ETAPaztridnurmalitawatiBelum ada peringkat
- Lapres3-Muhamad Rizqi Pratama-1110181049 PDFDokumen19 halamanLapres3-Muhamad Rizqi Pratama-1110181049 PDFRizqi PratamaBelum ada peringkat
- Mikrokontroler Arduino 3Dokumen9 halamanMikrokontroler Arduino 3Ade SembiringBelum ada peringkat
- Motor Servo FinalDokumen11 halamanMotor Servo Finalriki anggaraBelum ada peringkat
- Maintenace InverterDokumen20 halamanMaintenace InverterDany SetyawanBelum ada peringkat
- Prototipe Sistem Pencucian Mobil Otomatis BerbasisDokumen5 halamanPrototipe Sistem Pencucian Mobil Otomatis BerbasisAbdullah AzzamBelum ada peringkat
- Praktikum Sistem Kontrol DigitalDokumen9 halamanPraktikum Sistem Kontrol DigitaldilacantikBelum ada peringkat
- Photo Dioda Palang KADokumen16 halamanPhoto Dioda Palang KAadiBelum ada peringkat
- Pengertian AktuatorDokumen9 halamanPengertian AktuatorMumpuniLuthfiBelum ada peringkat
- Modul 4 - 170481100019 - Mohammad Nur IzzudinDokumen13 halamanModul 4 - 170481100019 - Mohammad Nur IzzudinavengedizzudinBelum ada peringkat
- Aspek KeuanganDokumen4 halamanAspek KeuanganavengedizzudinBelum ada peringkat
- Business Plan and Feasibility StudyDokumen13 halamanBusiness Plan and Feasibility StudyavengedizzudinBelum ada peringkat
- Modul 6 - 170481100019 - Mohammad Nur IzzudinDokumen12 halamanModul 6 - 170481100019 - Mohammad Nur IzzudinavengedizzudinBelum ada peringkat
- Aspek KeuanganDokumen4 halamanAspek KeuanganavengedizzudinBelum ada peringkat
- Modul 7 - 170481100019 - Mohammad Nur IzzudinDokumen14 halamanModul 7 - 170481100019 - Mohammad Nur IzzudinavengedizzudinBelum ada peringkat
- PAPARAN PENYEKATAN Rev1Dokumen33 halamanPAPARAN PENYEKATAN Rev1rista wijayantiBelum ada peringkat
- Surat Tawaran PKM 2021Dokumen2 halamanSurat Tawaran PKM 2021Flip SingadjiBelum ada peringkat
- UAS Sistem Informasi Manufaktur 2020 1aDokumen1 halamanUAS Sistem Informasi Manufaktur 2020 1aavengedizzudinBelum ada peringkat
- Aspek KeuanganDokumen4 halamanAspek KeuanganavengedizzudinBelum ada peringkat
- SK 230 Penetapan Penerima Bantuan Keringanan UKT-FINALDokumen2 halamanSK 230 Penetapan Penerima Bantuan Keringanan UKT-FINALavengedizzudinBelum ada peringkat
- Soal UAS Ekotek TM 2021Dokumen1 halamanSoal UAS Ekotek TM 2021avengedizzudinBelum ada peringkat
- Modul PrkatikumDokumen17 halamanModul PrkatikumavengedizzudinBelum ada peringkat
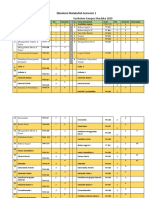
- Ekivalensi Matakuliah Prodi Teknik Mesin MBKM 2Dokumen6 halamanEkivalensi Matakuliah Prodi Teknik Mesin MBKM 2avengedizzudinBelum ada peringkat
- SOP Pemeliharaan Alat Pneumatik Atau Elektropneumatik Lab - OtomasiDokumen3 halamanSOP Pemeliharaan Alat Pneumatik Atau Elektropneumatik Lab - Otomasiavengedizzudin100% (1)
- Soallatihanminggu - 1Dokumen2 halamanSoallatihanminggu - 1LailatulFajriHelmiBelum ada peringkat
- Modul 2 (ANOVA) PDFDokumen49 halamanModul 2 (ANOVA) PDFYuliet SusantoBelum ada peringkat
- Daftar PustakaDokumen2 halamanDaftar Pustakamakken aiditBelum ada peringkat
- Bab IiDokumen32 halamanBab IiSyahrulBelum ada peringkat
- Makalah Tentang Motor BakarDokumen10 halamanMakalah Tentang Motor BakarMuaz Az ZubairBelum ada peringkat
- Tegangan Geser Dan Lentur PDFDokumen14 halamanTegangan Geser Dan Lentur PDFakhmadmarufnur609Belum ada peringkat