Anda mungkin juga menyukai
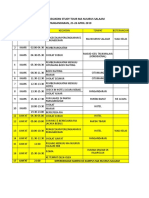
- Susunan Tour PangandaranDokumen2 halamanSusunan Tour PangandaranNURUL HIDAYAHBelum ada peringkat
- 05 Dinamika Rotasi Benda TegarDokumen9 halaman05 Dinamika Rotasi Benda TegarDeni ramdaniBelum ada peringkat
- Pert 7 Dinamika RotasiDokumen45 halamanPert 7 Dinamika RotasiLilis Suryani PBelum ada peringkat
- Jawaban LKM 17Dokumen13 halamanJawaban LKM 17Thunder AnimeBelum ada peringkat
- ModulDokumen6 halamanModulhaffidahBelum ada peringkat
- Momentum AngulerDokumen7 halamanMomentum AngulerAlfi Nur Albab100% (1)
- Modul PPPK Fisika PB 4 (Datadikdasmen - Om)Dokumen6 halamanModul PPPK Fisika PB 4 (Datadikdasmen - Om)Fadila InsaniaBelum ada peringkat
- GMB Roda RodaDokumen8 halamanGMB Roda Roda024Lita LucianaBelum ada peringkat
- Tugas Fisika Teknik Sipil 9Dokumen16 halamanTugas Fisika Teknik Sipil 9Akun FakeBelum ada peringkat
- Posisi SudutDokumen5 halamanPosisi SudutLyla WilliamBelum ada peringkat
- Bab 3.gerak Melingkar Beserta ContohnyaDokumen21 halamanBab 3.gerak Melingkar Beserta ContohnyaNur Fitri Widiningrum0% (1)
- Gerak MelingkarDokumen19 halamanGerak MelingkarWelly Afri L TobingBelum ada peringkat
- Angular MomentumDokumen36 halamanAngular MomentumMelda SariBelum ada peringkat
- TUGAS RESUME Gerak RotasiDokumen7 halamanTUGAS RESUME Gerak RotasiNur AlmiBelum ada peringkat
- Bab 1 KeseimbanganDokumen39 halamanBab 1 KeseimbanganSungkono DamanikBelum ada peringkat
- Gerak Melingkar 2 1Dokumen57 halamanGerak Melingkar 2 1Umi AqilaBelum ada peringkat
- Giancoli, D.C. 1998. Fisika Jilid 1. Edisi Ketujuh. Jakarta: Erlangga, Hal 136Dokumen6 halamanGiancoli, D.C. 1998. Fisika Jilid 1. Edisi Ketujuh. Jakarta: Erlangga, Hal 136I K WirawanBelum ada peringkat
- Laporan GMDokumen23 halamanLaporan GMYaumil Khairin SeptianiBelum ada peringkat
- Partikel Bermuatan Yang Bergerak MelingkarDokumen4 halamanPartikel Bermuatan Yang Bergerak MelingkarArdiansyah BataraBelum ada peringkat
- Modul Fisika Gerak Melingkar Kelas XDokumen5 halamanModul Fisika Gerak Melingkar Kelas XEugenius IfanBelum ada peringkat
- Rotasi Dan Gerak Benda TegarDokumen40 halamanRotasi Dan Gerak Benda Tegarchandara auniBelum ada peringkat
- Materi Pelatihan Pasca 2012Dokumen14 halamanMateri Pelatihan Pasca 2012Aminah RahmansyahBelum ada peringkat
- Hukum Kekakalan MomentumDokumen4 halamanHukum Kekakalan MomentumFahry UmasangadjiBelum ada peringkat
- Gerak Sem 3Dokumen7 halamanGerak Sem 3Ananda HarisBelum ada peringkat
- Pertemuan Ke-1 EnrichmentDokumen31 halamanPertemuan Ke-1 EnrichmentGeraldo RumapeaBelum ada peringkat
- Rotasi Dan Gerak Benda TegarDokumen50 halamanRotasi Dan Gerak Benda TegarRiyanto SinagaBelum ada peringkat
- RPP Gerak MelingkarDokumen12 halamanRPP Gerak MelingkarEka LiandariBelum ada peringkat
- 36 Modul Materi Gerak Melingkar 1 91F006471615943869Dokumen10 halaman36 Modul Materi Gerak Melingkar 1 91F006471615943869Yani HaryuniBelum ada peringkat
- Lks (Jefri Setiadi Waruwu)Dokumen9 halamanLks (Jefri Setiadi Waruwu)Jefri WaruwuBelum ada peringkat
- Gerak MelingkarDokumen17 halamanGerak MelingkarEster Valentsya KadakoloBelum ada peringkat
- Tugas AnalisisDokumen8 halamanTugas AnalisisNanda RositaBelum ada peringkat
- Kel 7 Gerak Melingkar Dan RotasiDokumen12 halamanKel 7 Gerak Melingkar Dan RotasiJesica Tamila LaufeisonBelum ada peringkat
- Gerak RotasiDokumen9 halamanGerak RotasiyatiiBelum ada peringkat
- Rak SirkularDokumen4 halamanRak SirkularAmelia AzzuraBelum ada peringkat
- Rangkuman Torsi Dan Momen InersiaDokumen12 halamanRangkuman Torsi Dan Momen InersiaWaskitaDwi100% (1)
- Kajian Fisika MekanikaDokumen27 halamanKajian Fisika MekanikaNatifa LampeangBelum ada peringkat
- Buku Gerak MelingkarDokumen18 halamanBuku Gerak MelingkarJelita PuspitaBelum ada peringkat
- 7-8 Statika Dan Dinamika Rotasi Benda TegarDokumen21 halaman7-8 Statika Dan Dinamika Rotasi Benda TegarsatriyopanalaranBelum ada peringkat
- Dinamika Rotasi Dan Kesetimbangan Benda TegarDokumen32 halamanDinamika Rotasi Dan Kesetimbangan Benda TegarHimmah Nabiila FirdausBelum ada peringkat
- Momen GayaDokumen8 halamanMomen GayaENDAH TRI PAMULABelum ada peringkat
- Teorema Sumbu Tegak LurusDokumen4 halamanTeorema Sumbu Tegak LurusSyarif Maulana HarahapBelum ada peringkat
- Modul 9 (Sembilan) Mekanika Benda TegarDokumen30 halamanModul 9 (Sembilan) Mekanika Benda Tegartyakirana100% (1)
- MAKALAHDokumen13 halamanMAKALAHfebywiryaniBelum ada peringkat
- Aplikasi Gerak ParabolaDokumen10 halamanAplikasi Gerak ParabolaPutrakisBelum ada peringkat
- 6.dinamika RotasiDokumen23 halaman6.dinamika RotasiEva JatiBelum ada peringkat
- Torsi Dan Percepatan SudutDokumen16 halamanTorsi Dan Percepatan SudutNora Fika SitumorangBelum ada peringkat
- Pfa19 - Rotasi - Kelompok 09 - Laporan Resmi - Lugas Haryo - 015Dokumen22 halamanPfa19 - Rotasi - Kelompok 09 - Laporan Resmi - Lugas Haryo - 015Lugas Haryo PradigdoBelum ada peringkat
- Dinamika RotasiDokumen8 halamanDinamika RotasiAlternatifa ProjectBelum ada peringkat
- Makalah Aplikasi Gerak ParabolaDokumen11 halamanMakalah Aplikasi Gerak ParabolaFrengki Deferson DimuBelum ada peringkat
- Artikel LMT UasDokumen10 halamanArtikel LMT UasRyan LagutBelum ada peringkat
- Gerak Melingkar Dan Rotasi Kel 1Dokumen10 halamanGerak Melingkar Dan Rotasi Kel 1NoviBelum ada peringkat
- Kinematika Benda KakuDokumen26 halamanKinematika Benda KakuIwan SurachwantoBelum ada peringkat
- 5 - Laprak Gerak RotasiDokumen17 halaman5 - Laprak Gerak RotasiSuci Farah DibaBelum ada peringkat
- CBR Fisika Kelompok 6 Pendidikan IpaDokumen10 halamanCBR Fisika Kelompok 6 Pendidikan IpaIndah cahyaniBelum ada peringkat
- GerakDokumen7 halamanGerakNURUL HIDAYAHBelum ada peringkat
- Chapter 13Dokumen1 halamanChapter 13NURUL HIDAYAHBelum ada peringkat
- Menghidupkan KomputerDokumen1 halamanMenghidupkan KomputerNURUL HIDAYAHBelum ada peringkat
- Momentum Dan ImpulsDokumen1 halamanMomentum Dan ImpulsNURUL HIDAYAHBelum ada peringkat
- Pengertian Magnetic DiskDokumen5 halamanPengertian Magnetic DiskNURUL HIDAYAHBelum ada peringkat
- Bahan Rotasi Benda Tegar 1Dokumen9 halamanBahan Rotasi Benda Tegar 1Agnes NovitaBelum ada peringkat
- DisscussionDokumen1 halamanDisscussionNURUL HIDAYAHBelum ada peringkat
- LKPD TeleskopDokumen4 halamanLKPD TeleskopDarwin Waruwu Maowu Falakhi100% (1)
- HomogenitasDokumen6 halamanHomogenitasNURUL HIDAYAHBelum ada peringkat
- The Power of DreamDokumen26 halamanThe Power of DreamNURUL HIDAYAHBelum ada peringkat