Anda mungkin juga menyukai
- Gugus Kendali MutuDokumen75 halamanGugus Kendali MutuwidiantoBelum ada peringkat
- Bahan Gypsum Dan KompositDokumen13 halamanBahan Gypsum Dan KompositSholehudin Al AyubiBelum ada peringkat
- Makalah Pribadi - Struktur Organisasi Dan Program Puskesmas Kecamatan Lubuk KilanganDokumen24 halamanMakalah Pribadi - Struktur Organisasi Dan Program Puskesmas Kecamatan Lubuk KilangansandurezuBelum ada peringkat
- Modul 2 Blok 10 Odontologi ForensikDokumen9 halamanModul 2 Blok 10 Odontologi ForensikDebby HonestyBelum ada peringkat
- DK 4Dokumen13 halamanDK 4Nabilla Mulya KurniawanBelum ada peringkat
- Laporan Skill Lab Biomaterial II Semen Seng Phospat LuttingDokumen7 halamanLaporan Skill Lab Biomaterial II Semen Seng Phospat LuttingJanatin AliyaBelum ada peringkat
- VancouverDokumen6 halamanVancouverDewi KurniasariBelum ada peringkat
- Gambaran Kebutuhan Jasa Tekniker Gigi Dalam Pembuatan Gigi Tiruan Di Kota Bandar LampungDokumen47 halamanGambaran Kebutuhan Jasa Tekniker Gigi Dalam Pembuatan Gigi Tiruan Di Kota Bandar LampungIrmaYantiJulianda100% (1)
- Data Isian Form Arisan Meri SusantiDokumen1 halamanData Isian Form Arisan Meri SusantiMeri NathaniaBelum ada peringkat
- Zotero Pre Printed VersionDokumen98 halamanZotero Pre Printed VersionAmirah FauziahBelum ada peringkat
- DK 2 - Skenario 3 - Ikgk 3 - PBL 3Dokumen139 halamanDK 2 - Skenario 3 - Ikgk 3 - PBL 3Fahriansyah Maulana SudirmanBelum ada peringkat
- Perencanaan Dasar Fasilitas Praktik Dokter GigiDokumen6 halamanPerencanaan Dasar Fasilitas Praktik Dokter GigiStacia Stefani0% (1)
- Soal Tentiran Material CetakDokumen6 halamanSoal Tentiran Material CetakShafira Noor LatifahBelum ada peringkat
- SOP Tumpatan Resin Komposit Aktivasi Sinar TampakDokumen6 halamanSOP Tumpatan Resin Komposit Aktivasi Sinar TampakMega Limawati PurbaBelum ada peringkat
- Latihan Kalimat (2) - Konjungsi dan Perbaikan KalimatDokumen9 halamanLatihan Kalimat (2) - Konjungsi dan Perbaikan KalimatNazar toha hutabaratBelum ada peringkat
- Metode SQC Statistical Quality Control Guna Mengurangi Jumlah CacatDokumen9 halamanMetode SQC Statistical Quality Control Guna Mengurangi Jumlah CacatUgiUgieBelum ada peringkat
- Rumus Asupan BalikDokumen44 halamanRumus Asupan BalikWand AgaintBelum ada peringkat
- REVIEW JURNALDokumen6 halamanREVIEW JURNALDrakor KasianBelum ada peringkat
- Cerita Rakyat BaritoDokumen4 halamanCerita Rakyat BaritooktariaBelum ada peringkat
- Hukum Termodinamika IDokumen6 halamanHukum Termodinamika IAyu Marisa Al-RahmanBelum ada peringkat
- Tugas Lab Dental LiliDokumen12 halamanTugas Lab Dental Liliina_cantiqBelum ada peringkat
- SAMPLING TEKNIKDokumen9 halamanSAMPLING TEKNIKsanot_caemBelum ada peringkat
- Prosedur Pemilihan Uji HipotesisDokumen16 halamanProsedur Pemilihan Uji HipotesisTiamas SiraitBelum ada peringkat
- Surat Rujukan PrktikumDokumen15 halamanSurat Rujukan PrktikumtyasBelum ada peringkat
- Proposal Bakti Sosial Gempa Cianjur 2022Dokumen9 halamanProposal Bakti Sosial Gempa Cianjur 2022conten viralBelum ada peringkat
- Duplikasi Model - EfinakDokumen49 halamanDuplikasi Model - EfinakSalsa NPSBelum ada peringkat
- Kuesioner Kepuasan Masyarakat Dengan Kualitas Pelayanan Puskesmas Sedayu II BantulDokumen3 halamanKuesioner Kepuasan Masyarakat Dengan Kualitas Pelayanan Puskesmas Sedayu II BantulSwastika Sekar AstriBelum ada peringkat
- Denta JournalDokumen133 halamanDenta JournalRima FitrianiBelum ada peringkat
- PRINT KaroDokumen35 halamanPRINT KaroAura Chaisya WardaniBelum ada peringkat
- Klamer PasifDokumen26 halamanKlamer PasifFitriani Ahmad100% (2)
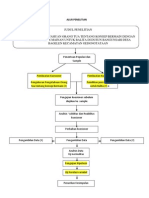
- Alur PenelitianDokumen2 halamanAlur PenelitianIlham FalaniBelum ada peringkat
- 100 Langkah Rencana Aksi KeuanganDokumen6 halaman100 Langkah Rencana Aksi KeuanganHafidz AshsidieqiBelum ada peringkat
- KawatGigiUntukMerapikanSusunanGigiYangTidakRapihDokumen19 halamanKawatGigiUntukMerapikanSusunanGigiYangTidakRapihgumilangggBelum ada peringkat
- HT BAB1to5Dokumen34 halamanHT BAB1to5Muhamadm_IrhamBelum ada peringkat
- Cinnamon Ginger ChocolateDokumen21 halamanCinnamon Ginger ChocolateNurul Fatimah Az-zahraBelum ada peringkat
- Makalah Six SigmaDokumen19 halamanMakalah Six Sigmazzacky2000Belum ada peringkat
- SPK MARMERDokumen2 halamanSPK MARMERSugeng SupriyantoBelum ada peringkat
- Nvivo BasicsDokumen11 halamanNvivo BasicsMuhamadSyaefulAnwarBelum ada peringkat
- Termasuk istilah medis dan komponen pembentuknyaDokumen3 halamanTermasuk istilah medis dan komponen pembentuknyaNabila azhBelum ada peringkat
- File - 1 BUKU SKILLS LAB 41 2021 - E59c51aaDokumen94 halamanFile - 1 BUKU SKILLS LAB 41 2021 - E59c51aaNada Syafa TitaniaBelum ada peringkat
- Alat Bedah MulutDokumen12 halamanAlat Bedah MulutAida SalsabylaBelum ada peringkat
- ALERGI METIL METAKRILATDokumen6 halamanALERGI METIL METAKRILATveonycitraa100% (1)
- MENJADI PRIBADI YANG BERDISIPLINDokumen1 halamanMENJADI PRIBADI YANG BERDISIPLINWahyu NugrohoBelum ada peringkat
- Isu Strategis Tujuan SasaranDokumen2 halamanIsu Strategis Tujuan SasaranHutri JambakBelum ada peringkat
- SEM (Strutural Equation Model) Dalam Penelitian Manajemen Dan Sistem InformasiDokumen221 halamanSEM (Strutural Equation Model) Dalam Penelitian Manajemen Dan Sistem Informasidedi100% (2)
- STATISTIKALDokumen24 halamanSTATISTIKALikes dwi100% (1)
- Nuraini Luthfiah (J12020122) Istek Bab 6Dokumen1 halamanNuraini Luthfiah (J12020122) Istek Bab 6Nuraini LuthfiahBelum ada peringkat
- Kuliah 05 Pengaruh Pajak Dan Subsidi Pada Keseimbangan PasarDokumen20 halamanKuliah 05 Pengaruh Pajak Dan Subsidi Pada Keseimbangan PasarMoh IsmangilBelum ada peringkat
- Soal Uas Statistik LanjutDokumen2 halamanSoal Uas Statistik Lanjutdanangk95Belum ada peringkat
- RANGKUMAN ANATOMI GIGIDokumen25 halamanRANGKUMAN ANATOMI GIGIAziz KurosakiBelum ada peringkat
- InformasiGigiDokumen13 halamanInformasiGigiHenri IndrawanBelum ada peringkat
- Contoh Review MakalahDokumen9 halamanContoh Review MakalahdedeBelum ada peringkat
- Standar Pelayanan RSP Jember 2019Dokumen60 halamanStandar Pelayanan RSP Jember 2019DhipaBelum ada peringkat
- Logika ManunDokumen10 halamanLogika ManunputrivioBelum ada peringkat
- Representasi PengetahuanDokumen21 halamanRepresentasi PengetahuanTeofilus EvanBelum ada peringkat
- Quantifying Uncertainty IDokumen7 halamanQuantifying Uncertainty IIndahBelum ada peringkat
- Logika MatematikaDokumen15 halamanLogika MatematikaULFA MAESAROHBelum ada peringkat
- OPTIMASI DERIVATIFDokumen3 halamanOPTIMASI DERIVATIFkiki putriyaniBelum ada peringkat
- Prinsip Dasar BerlogikaDokumen7 halamanPrinsip Dasar BerlogikaWikeu Ayu LestariBelum ada peringkat
- Materi 8 - Konsep Pembelajaran (Learning)Dokumen13 halamanMateri 8 - Konsep Pembelajaran (Learning)zhazhiy newBelum ada peringkat
- 5 6327654113219707364 PDFDokumen110 halaman5 6327654113219707364 PDFarbong007Belum ada peringkat
- Minggu 11 - Artificial Neural Network (Part 2)Dokumen22 halamanMinggu 11 - Artificial Neural Network (Part 2)arbong007Belum ada peringkat
- Kebijakan Penyelesaian Kti Dan Skripsi Mahasiswa Fakultas Kesehatan Terkait Kewaspadaan Covid 19Dokumen8 halamanKebijakan Penyelesaian Kti Dan Skripsi Mahasiswa Fakultas Kesehatan Terkait Kewaspadaan Covid 19Cicih NuryatiBelum ada peringkat
- Jadwal Sidang Proposal ITera 2020Dokumen7 halamanJadwal Sidang Proposal ITera 2020arbong007Belum ada peringkat
- Final Panduan Tugas Akhir PKL KKN Masa PandemiDokumen18 halamanFinal Panduan Tugas Akhir PKL KKN Masa Pandemiarbong007Belum ada peringkat
- Pelatihan Pemanfaatan Jaringan Lan Dan Internet Kepada Sekretaris Dan Bendahara Desa Se-Kecamatan Hinai Kab. LangkatDokumen21 halamanPelatihan Pemanfaatan Jaringan Lan Dan Internet Kepada Sekretaris Dan Bendahara Desa Se-Kecamatan Hinai Kab. Langkatarbong007Belum ada peringkat
- Proposal Pengabdian Kepada MasyarakatDokumen16 halamanProposal Pengabdian Kepada Masyarakatarbong007Belum ada peringkat
- 4 Pedoman Penulisan Skripsi 2020Dokumen35 halaman4 Pedoman Penulisan Skripsi 2020arbong007Belum ada peringkat
- Pembagian Kelompok Pks TPB 44Dokumen2 halamanPembagian Kelompok Pks TPB 44arbong007Belum ada peringkat
- Mg05 - Komunikasi PDFDokumen26 halamanMg05 - Komunikasi PDFarbong007Belum ada peringkat
- Perbedaan - Precision, Recall & Accuracy - DATA's BASEDokumen9 halamanPerbedaan - Precision, Recall & Accuracy - DATA's BASEarbong007Belum ada peringkat
- AlgoritmaDokumen7 halamanAlgoritmaarbong007Belum ada peringkat
- Pembagian Kelompok Pks TPB 44Dokumen2 halamanPembagian Kelompok Pks TPB 44arbong007Belum ada peringkat
- Penyelesaian Matematika Dengan JST MetodDokumen6 halamanPenyelesaian Matematika Dengan JST Metodarbong007Belum ada peringkat
- Algoritma Perceptron Dan Backpropagation Beserta Contoh Aplikasi Jaringan Syaraf TiruanDokumen12 halamanAlgoritma Perceptron Dan Backpropagation Beserta Contoh Aplikasi Jaringan Syaraf TiruanZeni PermatasariBelum ada peringkat