Anda mungkin juga menyukai
- Model Matematika Sistem ElektromekanikaDokumen12 halamanModel Matematika Sistem ElektromekanikaNindi Widia Devi RahmasariBelum ada peringkat
- PDP ParabolikDokumen33 halamanPDP ParabolikDEde SubanardoBelum ada peringkat
- Panjang Sirip Sebesar L PDokumen8 halamanPanjang Sirip Sebesar L PZheeBelum ada peringkat
- Presentasi Heat Transfer 4Dokumen19 halamanPresentasi Heat Transfer 4David Assidiq ZainuriBelum ada peringkat
- Contoh Soal Chapter 1Dokumen15 halamanContoh Soal Chapter 1Rani TriwrdhBelum ada peringkat
- TR 3 - Fisika Zat Padat - Pimpy Sheila SigalinggingDokumen4 halamanTR 3 - Fisika Zat Padat - Pimpy Sheila SigalinggingPimpy SigalinggingBelum ada peringkat
- Makalah Transformasi LaplaceDokumen16 halamanMakalah Transformasi LaplaceHaikal HafadBelum ada peringkat
- Soal Jawab Mekanika Statistik 8Dokumen3 halamanSoal Jawab Mekanika Statistik 8muid80100% (1)
- TR 3 Fisika Zat Padat - Elva SellyaDokumen5 halamanTR 3 Fisika Zat Padat - Elva SellyaEva Rolita HarianjaBelum ada peringkat
- UAS Gelombang Dan Optik - E1Q019032 - Julia Rahmania PutriDokumen43 halamanUAS Gelombang Dan Optik - E1Q019032 - Julia Rahmania PutriJulia Rahmania PutriBelum ada peringkat
- Charles Kittel Introduction To Solid State Physi BookFi - Org - Halaman-194-199.en - IdDokumen7 halamanCharles Kittel Introduction To Solid State Physi BookFi - Org - Halaman-194-199.en - IdDhita LinchBelum ada peringkat
- UAS Gelombang Dan Optik - E1Q019032 - Julia Rahmania PutriDokumen43 halamanUAS Gelombang Dan Optik - E1Q019032 - Julia Rahmania PutriJulia Rahmania PutriBelum ada peringkat
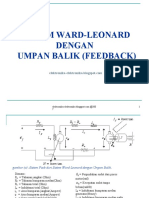
- Sistem Ward LeonardDokumen18 halamanSistem Ward LeonardMuhammad RafsanzaniBelum ada peringkat
- 03 PD 1Dokumen22 halaman03 PD 1Vivi IryaniBelum ada peringkat
- Kuliah Dinamika Lengkap PDFDokumen144 halamanKuliah Dinamika Lengkap PDFTujuhdelapan ZalzalahBelum ada peringkat
- Yulkifli Dan Hufri Joki 2011 68-456-1-PBDokumen10 halamanYulkifli Dan Hufri Joki 2011 68-456-1-PBRahmi Hendrika putri2208Belum ada peringkat
- 6.model Elektron Bebas (KULIAH)Dokumen31 halaman6.model Elektron Bebas (KULIAH)Alonso GhufronBelum ada peringkat
- Hamburan-Gelombang-Oleh-Struktur-Kristal 7613 0 PDFDokumen5 halamanHamburan-Gelombang-Oleh-Struktur-Kristal 7613 0 PDFRiska Damayanti SyamBelum ada peringkat
- Hamburan-Gelombang-Oleh-Struktur-Kristal 7613 0 PDFDokumen5 halamanHamburan-Gelombang-Oleh-Struktur-Kristal 7613 0 PDFRiska Damayanti SyamBelum ada peringkat
- Energi Fermi 1 PDFDokumen31 halamanEnergi Fermi 1 PDFEmmaMaemunahBelum ada peringkat
- CompositeDokumen14 halamanCompositehilmi firmansyahBelum ada peringkat
- Riki Febrianto - DERET FOURIERDokumen8 halamanRiki Febrianto - DERET FOURIERRicky FebriantoBelum ada peringkat
- Fisika Modern-Efek ComptonDokumen8 halamanFisika Modern-Efek Comptonmuliana razakBelum ada peringkat
- Penerapan IntegralDokumen9 halamanPenerapan IntegralAntonio Grafiko100% (1)
- ADS Teori Getaran 5Dokumen53 halamanADS Teori Getaran 5Muchtar SufaatBelum ada peringkat
- Soal Fisika SBMPTN 2009Dokumen3 halamanSoal Fisika SBMPTN 2009Achmad RiyadiBelum ada peringkat
- Fungsi Transfer, Diagram Blok Dan Respon Sistem Orde 1Dokumen20 halamanFungsi Transfer, Diagram Blok Dan Respon Sistem Orde 1Suci FajriatiBelum ada peringkat
- Penyelesaian Persamaan Panas Untuk Cincin Lingkar Tipis Dengan Metode Pemisahan VariabelDokumen9 halamanPenyelesaian Persamaan Panas Untuk Cincin Lingkar Tipis Dengan Metode Pemisahan VariabelSCB SaveBelum ada peringkat
- Kelompok 5 - PPT Dinamika Elektron BebasDokumen28 halamanKelompok 5 - PPT Dinamika Elektron BebasLaili SuryaniBelum ada peringkat
- Integral GarisDokumen9 halamanIntegral GarisLussy Armina100% (1)
- Babviii Deret FourierDokumen19 halamanBabviii Deret FourierSitti HasaniyahBelum ada peringkat
- CH 15 Gelombang Elektromagnetik Dalam VakumDokumen19 halamanCH 15 Gelombang Elektromagnetik Dalam Vakumblackburn1022100% (1)
- Modul Matematika 3 (TM10)Dokumen11 halamanModul Matematika 3 (TM10)sitinurbaytiBelum ada peringkat
- M. Tauffan. H. N Dan Nurlaily Pertemuan 4 Medan Listrik Kontinu CCPDokumen24 halamanM. Tauffan. H. N Dan Nurlaily Pertemuan 4 Medan Listrik Kontinu CCPJey sorisBelum ada peringkat
- Minggu 4 DSK4-PRINTDokumen13 halamanMinggu 4 DSK4-PRINTdeviBelum ada peringkat
- 7 Simulasi2Dokumen25 halaman7 Simulasi2WillianBelum ada peringkat
- Dinamika Struktur Kuliah 5Dokumen22 halamanDinamika Struktur Kuliah 5dhea christy0% (1)
- Lemma FloorDokumen2 halamanLemma FloorItsRafa KBelum ada peringkat
- ZAT - PADAT - 4 Difraksi Sinar XDokumen40 halamanZAT - PADAT - 4 Difraksi Sinar XNur AisyahBelum ada peringkat
- Atom BohrDokumen8 halamanAtom BohrRenyBelum ada peringkat
- Lengkungan Di R2 Dan R3Dokumen5 halamanLengkungan Di R2 Dan R3Ira Sufina ZahraBelum ada peringkat
- Materi Gaya LoretzDokumen42 halamanMateri Gaya LoretzWahYudi Yudi YudiBelum ada peringkat
- Rangkuman Fisika SMADokumen42 halamanRangkuman Fisika SMAJosephine Putri NugrahiniBelum ada peringkat
- Dokumen Fisika Dasar IiDokumen45 halamanDokumen Fisika Dasar IiAlbertus Wahyu Suwido100% (1)
- Persamaan BesselDokumen13 halamanPersamaan BesselHelmi BaharBelum ada peringkat
- Kuliah Ke 3Dokumen6 halamanKuliah Ke 3Dimas Kharizmi Albar IPBBelum ada peringkat
- Materi Pertemuan XIVDokumen6 halamanMateri Pertemuan XIVMichelleBelum ada peringkat
- 1 Hukum Coulomb 1aDokumen26 halaman1 Hukum Coulomb 1aNajmi Fushila MadinaBelum ada peringkat
- Dualisme Partikel Gelombang: 1 Efek FotolistrikDokumen7 halamanDualisme Partikel Gelombang: 1 Efek FotolistrikMuhammad FajrinBelum ada peringkat
- Lntensitas Medan ListrikDokumen12 halamanLntensitas Medan ListrikYusriadi Lado GaBelum ada peringkat
- Phonons II Ciri Ciri Thermal FixDokumen30 halamanPhonons II Ciri Ciri Thermal Fixjeje aanBelum ada peringkat
- Tugas 1 Geometri Oleh SyafruddinDokumen8 halamanTugas 1 Geometri Oleh SyafruddinMuhammad Sofian AnsarBelum ada peringkat
- Penyelesaian Soal Bab 4 Rikardo SitohangDokumen8 halamanPenyelesaian Soal Bab 4 Rikardo SitohangRikardo SitohangBelum ada peringkat
- Bab 1 Teori KonvolusiDokumen11 halamanBab 1 Teori KonvolusiBerlian Siregar100% (1)
- KB-2 Modul 4 Fis Zat PadatDokumen21 halamanKB-2 Modul 4 Fis Zat PadatIntan NurjannahBelum ada peringkat
- BAB II GiantDokumen27 halamanBAB II GiantBayu AgungBelum ada peringkat
- Simulasi Perancangan Kalkulator Berbasis 267565b2Dokumen4 halamanSimulasi Perancangan Kalkulator Berbasis 267565b2alvida pramudiantiBelum ada peringkat
- Bab 3Dokumen30 halamanBab 3alvida pramudiantiBelum ada peringkat
- Kelompok 9Dokumen23 halamanKelompok 9alvida pramudiantiBelum ada peringkat
- BAB 2.tinjauan PustakaDokumen19 halamanBAB 2.tinjauan PustakaRizki Imas NovalBelum ada peringkat
- 7 SegmentDokumen14 halaman7 Segmentalvida pramudiantiBelum ada peringkat
- Bab Ii PDFDokumen33 halamanBab Ii PDFFajarDikaNurohmanBelum ada peringkat
- ID Pemodelan Dan Simulasi Sistem Proteksi MDokumen5 halamanID Pemodelan Dan Simulasi Sistem Proteksi Malvida pramudiantiBelum ada peringkat
- Bab IiDokumen29 halamanBab Iialvida pramudiantiBelum ada peringkat
- 1 PBDokumen11 halaman1 PBNew Faizin RidhoBelum ada peringkat
- 229 450 1 SXMDokumen20 halaman229 450 1 SXMFildzah Raihan KiasatiBelum ada peringkat
- Jbptppolban GDL Muhammadta 3683 3 Bab2 7Dokumen39 halamanJbptppolban GDL Muhammadta 3683 3 Bab2 7BrianBelum ada peringkat
- Analisa Ketangguhan Dan Struktur Mikro Pada Daerah Las Dan HAZ Hasil Pengelasan SAW Baja SM 490Dokumen7 halamanAnalisa Ketangguhan Dan Struktur Mikro Pada Daerah Las Dan HAZ Hasil Pengelasan SAW Baja SM 490Wahyu Lailil Fais100% (1)
- Panduan Pengabdian Masyarakat 18Dokumen14 halamanPanduan Pengabdian Masyarakat 18Adlian EddeyBelum ada peringkat
- mJD8wQfdItJDlump PDFDokumen25 halamanmJD8wQfdItJDlump PDFIlhamBelum ada peringkat
- ID Pengembangan Material Tapak Roda KeretaDokumen9 halamanID Pengembangan Material Tapak Roda Keretaalvida pramudiantiBelum ada peringkat
- 145 477 1 PBDokumen8 halaman145 477 1 PBkanosriBelum ada peringkat
- Permenhub No.42 Th.2010 Standar Spesifikasi Kereta DGN Penggerak SendiriDokumen23 halamanPermenhub No.42 Th.2010 Standar Spesifikasi Kereta DGN Penggerak SendiriMAndriLudfiFananiBelum ada peringkat
- KarakterisasiMaterial Test Procedurekuliah3Dokumen22 halamanKarakterisasiMaterial Test Procedurekuliah3Ijank LarozeBelum ada peringkat
- Metalurgi Fisik Adalah PengetahuanDokumen12 halamanMetalurgi Fisik Adalah PengetahuanHusnul Khotimah KosongtigabelasBelum ada peringkat
- Jurnal Heat Treatment PDFDokumen5 halamanJurnal Heat Treatment PDFkanaBelum ada peringkat
- Kalibrasi Pompa Injeksi Diesel (Bosch Pump) Dengan Menggunakan Alat Test BenchDokumen19 halamanKalibrasi Pompa Injeksi Diesel (Bosch Pump) Dengan Menggunakan Alat Test BenchZaenal Ma'arif100% (12)
- 371-Article Text-1097-1-10-20190103Dokumen12 halaman371-Article Text-1097-1-10-20190103alvida pramudiantiBelum ada peringkat
- Motor DC PDFDokumen16 halamanMotor DC PDFKevin Adit100% (2)
- 4a - Karakteristik SistemDokumen5 halaman4a - Karakteristik Sistemalvida pramudiantiBelum ada peringkat
- 340 1336 1 PB PDFDokumen9 halaman340 1336 1 PB PDFRezi OktaviandriBelum ada peringkat
- Bab IiDokumen19 halamanBab Iinindi vintianiBelum ada peringkat
- 3d4 - Model Matematika Sistem Permukaan Zat CairDokumen7 halaman3d4 - Model Matematika Sistem Permukaan Zat Cairalvida pramudiantiBelum ada peringkat
- Heat TreatmentDokumen18 halamanHeat TreatmentRahman SonowijoyoBelum ada peringkat